前言:每一版ROS都有其对应版本的Ubuntu版本,切记不可随便装。
查看ubuntu版本:在命令行输入lsb_release -a
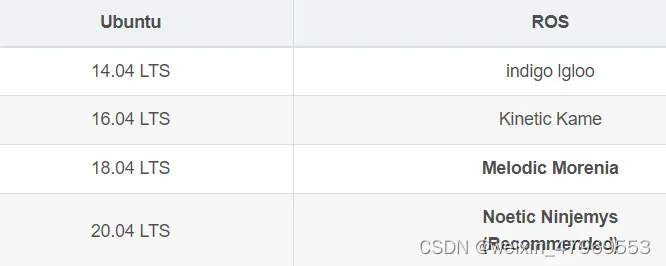
本文以Ubuntu18.04,安装ROS melodic版本为例
卸载 ROS
若之前没有装过ROS,可跳过
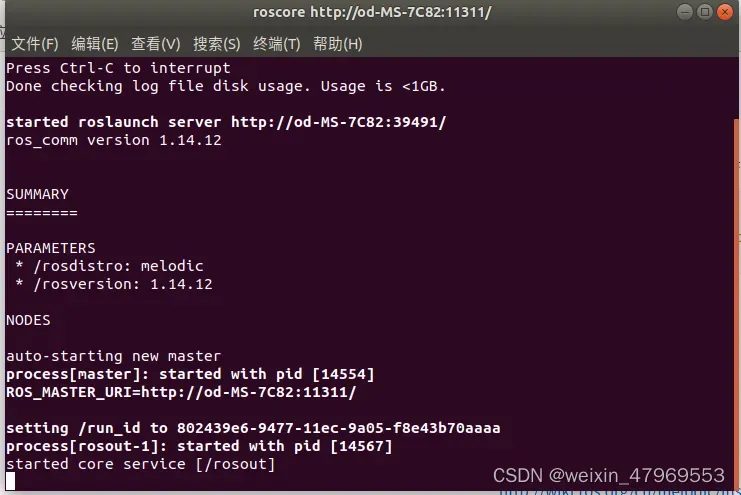
若不知道装没装过,打开终端【Ctrl+Alt+T】,在终端中输入 roscore
若出现如下画面,则说明已经安装,恭喜你!
如果想要卸载重装或是版本不对,那么就要先卸载,具体操作步骤如下
在这里插入图片描述
具体操作步骤:
1、在ubuntu18.04系统桌面中使用快捷键【Ctrl+Alt+T】打开终端命令行模式。
2、在ubuntu18.04终端命令行中输入以下命令直接卸载全部ros。
sudo apt-get autoremove --purge ros-melodic
#(我在这一步,终端提示未定位到ros-melodic软件包,所以未完成卸载,用步骤四)
# 或者你可以试试下面这个命令,不过我没有测试
sudo apt-get remove ros-*
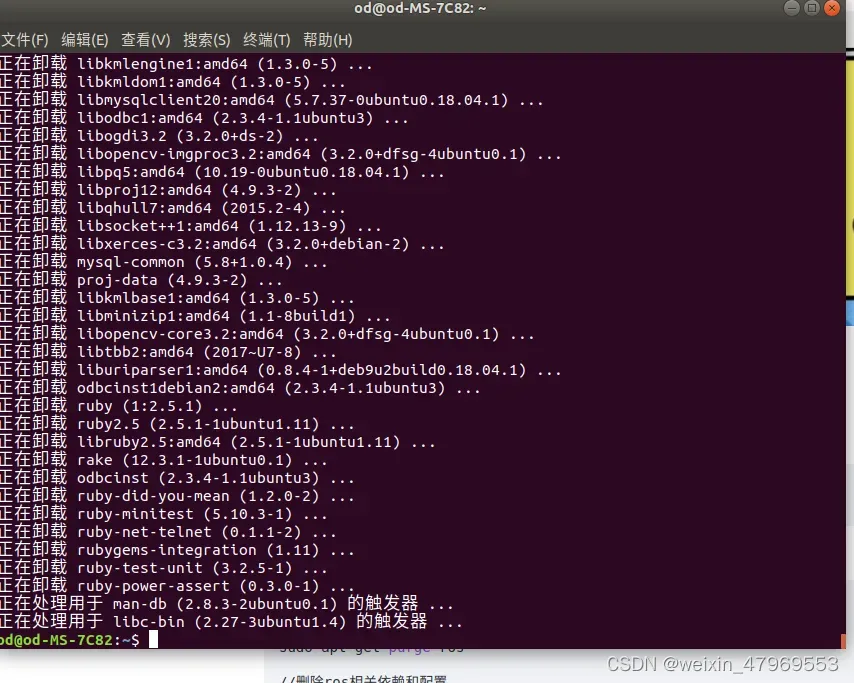
3、还可以输入以下命令逐步卸载ros即可。
//先卸载ros包
sudo apt-get purge ros-*
//删除ros相关依赖和配置
sudo apt-get autoremove
安装ROS
1. 设置sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
# 若下载速度缓慢,推荐就近选择一个镜像源替换上面的命令。例如,Tsinghua University为:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
如果依旧遇到连接问题,请尝试为Ubuntu apt换源(非ROS网站)。
我们以安装melodic版本的ROS为例:
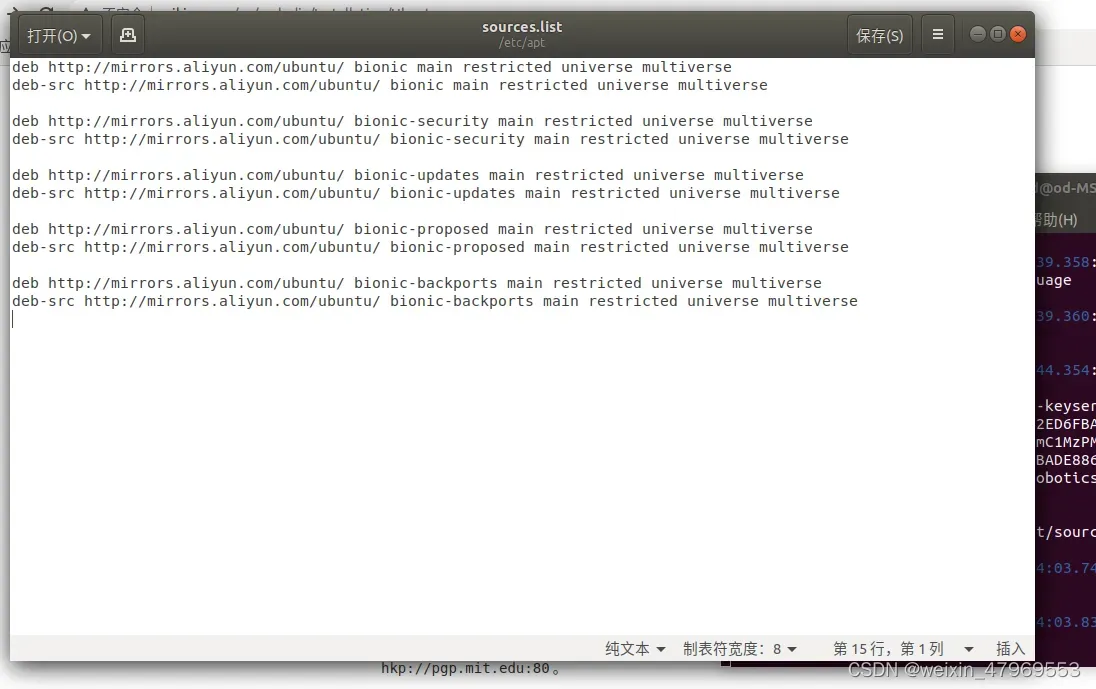
sudo gedit /etc/apt/sources.list
deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
如图所示:
2. 设置密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3. 安装
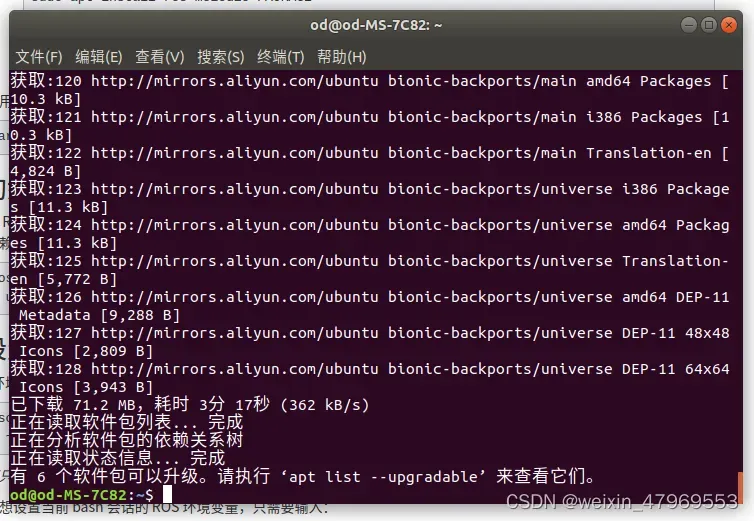
首先,确保你的 Debian 包索引是最新的:
sudo apt update
# 推荐新手安装 desktop-Full(桌面完整版),其他版本都有一些东西不全
sudo apt install ros-melodic-desktop-full
另,如要查找可用软件包,请运行:
apt search ros-melodic
4. 初始化 rosdep
在你使用 ROS 之前,需要初始化 rosdep。
rosdep 让你能够轻松地安装被想要编译的源代码,或被某些 ROS 核心组件需要的系统依赖。
sudo rosdep init
rosdep update
如果遇到下面的error:

是网络问题,如能挂VPN翻外网应该没问题,如不能看下面:
其中 sudo rosdep init 与 rosdep update问题的解决:
1、解决ROS系统 rosdep update超时问题的新方法 (如仍未解决,看方法2)
2、rosdep init/update 解决方法(如仍未解决,看方法3)
3、本文之后,世上再无rosdep更新失败问题!如果有…小鱼就…(如仍未解决,那我也么办法了、、、)
5. 设置环境
将 ROS 环境变量自动添加到新 bash 会话会很方便:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc source ~/.bashrc
6. 检查安装完成:
运行小海龟示例
打开终端,执行:
roscore
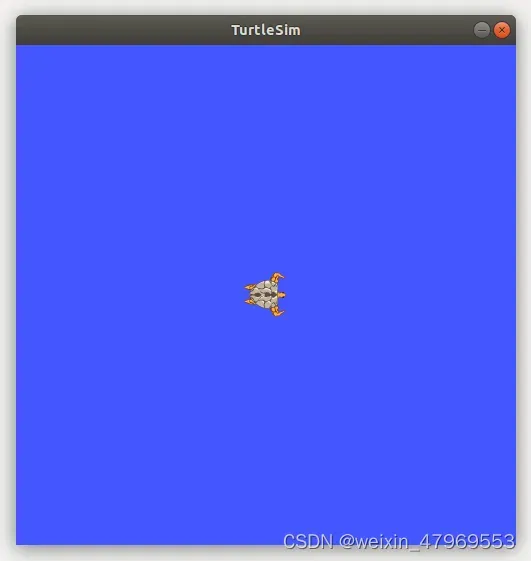
另开新的终端,执行:
rosrun turtlesim turtlesim_node
弹出小海龟界面:
另开新的终端(第三个终端了),执行:
rosrun turtle_teleop_key
保持该终端中的光标处于激活状态,通过方向键即可控制小海龟的移动。
7、相关参考资料
1、官网安装教程(信官网,得永生)
2、不错的博客:
3、ROS安装.pdf
8、ROS 学习资料
1、官网tutorials (信官网,得永生)
2、书籍,多读书,推荐古月《ROS 机器人开发实践》
3、B站上古月老师的课程(学ROS的人都知道的大佬—古月)
9、零碎知识汇总
1、rosdep command
2、ROS 之 rosdep 妙用:一键解决package依赖包问题
rosdep的主要用途是安装工作空间中ros包的依赖。
首先切换到工作空间下,然后运行下述命令即可安装该工作空间的所有依赖
rosdep install --from-paths src --ignore-src -r -y
版权声明:本文为博主作者:不到一米八原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/weixin_47969553/article/details/128634205