目录
-
- 函数的[官方解释](https://docs.opencv.org/4.x/d9/d0c/group__calib3d.html#ga617b1685d4059c6040827800e72ad2b6)
-
- 函数原型
- 参数说明:
-
- 输入参数:
- 输出参数:
- 函数代码测试
函数的官方解释
函数原型
void cv::stereoRectify ( InputArray cameraMatrix1,
InputArray distCoeffs1,
InputArray cameraMatrix2,
InputArray distCoeffs2,
Size imageSize,
InputArray R,
InputArray T,
OutputArray R1,
OutputArray R2,
OutputArray P1,
OutputArray P2,
OutputArray Q,
int flags = CALIB_ZERO_DISPARITY,
double alpha = -1,
Size newImageSize = Size(),
Rect * validPixROI1 = 0,
Rect * validPixROI2 = 0
)
函数作用是得到矫正的双目图像所需的变换矩阵和投影矩阵,然后可以传给 initUndistortRectifyMap 函数生成矫正图像到原始图像的像素坐标的映射,最后使用 remap 函数得到校正的双目图像。
上面说的校正的双目图像特点是:1. 双目相机的成像平面为同一平面;2. 左右目图像同一极线平行且极线上所有点的 y 坐标相等。
参数说明:
输入参数:
cameraMatrix1:左目相机内参矩阵
distCoeffs1:左目相机畸变参数
cameraMatrix2:右目相机内参矩阵
distCoeffs2:右目相机畸变参数
imageSize:图像大小
R:左目相机坐标系到右目相机坐标系的旋转变换,即
T:左目相机坐标系到右目相机坐标系的平移变换,即
flags:如果设置为 CALIB_ZERO_DISPARITY,函数会将两个相机的 principal point 设成一样。否则就会平移图像最大化有用的图像区域。
alpha:自由缩放参数。如果设置为 -1 或者不设置,函数执行默认缩放。否则参数应为 0-1 。0:矫正图像会放大和平移使得最终图像中只有有效像素;1:图像会缩小和平移使得原始图像中所有像素都可见。
newImageSize:矫正后的图像分辨率。默认(0,0),设置为原始图像大小。设置为高的分辨率可以保持原始图像的更多细节,特别是畸变较大的时候。
validPixROI1:一个最多地包含有效像素的长方形。(左目图像)
validPixROI2:一个最多地包含有效像素的长方形。(右目图像)
输出参数:
R1:矫正旋转矩阵。将第一个相机坐标系下未矫正的点变换到第一个相机矫正坐标系下,即 R_{左矫正坐标系}{左未矫正坐标系}
R2:矫正旋转矩阵。将第二个相机坐标系下未矫正的点变换到第二个相机矫正坐标系下,即 R_{右矫正坐标系}{右未矫正坐标系}
P1:3×4左相机投影矩阵。将左矫正坐标系下的点投影到左矫正坐标系图像平面坐标系。
P2:3×4右相机投影矩阵。将左矫正坐标系下的点投影到右矫正坐标系图像平面坐标系。
Q:4×4的视差深度映射矩阵。
对于水平双目相机(大部分的双目相机),其中 P1, P2, Q 定义如下:
函数代码测试
我们使用EuRoC MAV数据集的双目相机参数对这个函数做测试:
#include <opencv2/core.hpp>
#include <opencv2/calib3d.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <iostream>
#include <Eigen/Core>
#include <Eigen/Geometry>
using namespace cv;
using namespace std;
int main(int argc, char **argv)
{
if(argc != 3){
cerr << "Error: please input 2 images." << endl;
return -1;
}
// Euroc 数据集双目相机内参
Mat Kl = ( Mat_<float>(3,3) << 458.654, 0., 367.215,
0., 457.296, 248.375,
0., 0., 1.);
Mat Kr = ( Mat_<float>(3,3) << 457.587, 0., 379.999,
0., 456.134, 255.238,
0., 0., 1.);
Mat Dl = ( Mat_<float>(1,4) << -0.28340811, 0.07395907, 0.00019359, 1.76187114e-05 ); // 畸变参数
Mat Dr = ( Mat_<float>(1,4) << -0.28368365, 0.07451284, -0.00010473, -3.55590700e-05 );
// 双目相机相对位姿
Mat R_rl = ( Mat_<double>(3,3) << 9.99997256e-01, 2.31206719e-03, 3.76008102e-04,
-2.31713572e-03, 9.99898049e-01, 1.40898358e-02,
-3.43393121e-04, -1.40906685e-02, 9.99900663e-01 );
Mat t_rl = ( Mat_<double>(3,1) << -0.11007381, 0.00039912, -0.0008537 ); // 变换的数据类型需要时double的,不然之后执行opencv的函数会报错
Mat img_src_l = imread(argv[1], IMREAD_UNCHANGED); // 读取左右目图像
Mat img_src_r = imread(argv[2], IMREAD_UNCHANGED);
cout << "read images finished. " << endl;
int width = img_src_l.cols, height = img_src_l.rows;
Mat Rl, Rr, Pl, Pr, Q;
Mat undistmap1l, undistmap2l, undistmap1r, undistmap2r;
stereoRectify( Kl, Dl, Kr, Dr, Size(width, height), R_rl, t_rl, Rl, Rr, Pl, Pr, Q, cv::CALIB_ZERO_DISPARITY, 0 );
cout << "stereo rectify finished. " << endl;
initUndistortRectifyMap( Kl, Dl, Rl, Pl, cv::Size(width,height), CV_16SC2, undistmap1l, undistmap2l );
initUndistortRectifyMap( Kr, Dr, Rr, Pr, cv::Size(width,height), CV_16SC2, undistmap1r, undistmap2r );
// 将 R_21 和 t_21 转换为两个校正相机坐标系的变换
cout << "R_rl before rectification: " << endl << R_rl << endl;
R_rl = Rr * R_rl * Rl.t();
cout << "R_rl after rectification: " << endl << R_rl << endl;
cout << "t_rl before rectification: " << endl << t_rl.t() << endl;
t_rl = Rr * t_rl;
cout << "t_rl after rectification: " << endl << t_rl.t() << endl;
// 打印投影矩阵
cout << "Pl: " << endl << Pl << endl;
cout << "Pr: " << endl << Pr << endl;
// 得到校正图像
Mat img_rtf_l, img_rtf_r;
remap( img_src_l, img_rtf_l, undistmap1l, undistmap2l, cv::INTER_LINEAR );
remap( img_src_r, img_rtf_r, undistmap1r, undistmap2r, cv::INTER_LINEAR );
Mat img_src, img_rtf;
hconcat(img_src_l, img_src_r, img_src);
hconcat(img_rtf_l, img_rtf_r, img_rtf);
cvtColor(img_src, img_src, COLOR_GRAY2BGR);
cvtColor(img_rtf, img_rtf, COLOR_GRAY2BGR);
// 绘制平行线
for(int i = 1, iend = 8; i < iend; i++){
int h = height/iend * i;
line(img_src, Point2i(0, h), Point2i(width*2, h), Scalar(0,0,255));
line(img_rtf, Point2i(0, h), Point2i(width*2, h), Scalar(0,0,255));
}
imshow("image_src", img_src);
imshow("image_rtf", img_rtf);
waitKey(0);
return 0;
}
校正前后 左目相机到右目相机的旋转矩阵:
R_rl before rectification:
[0.999997256, 0.00231206719, 0.000376008102;
-0.00231713572, 0.999898049, 0.0140898358;
-0.000343393121, -0.0140906685, 0.999900663]
R_rl after rectification:
[0.999999999522207, -2.395107227679009e-12, 6.39099232960692e-12;
-2.39902704968578e-12, 1.000000000493077, -4.695780200869464e-11;
6.390414450718838e-12, -4.698293904886045e-11, 1.00000000036201]
校正后的旋转矩阵几乎与单位矩阵相等,说明两个相机的成像平面平行。
校正前后 左目相机到右目相机的平移向量:
t_rl before rectification:
[-0.11007381, 0.00039912, -0.0008537]
t_rl after rectification:
[-0.1100778440394819, -1.899859817072477e-16, 5.956099065901966e-16]
校正后两个相机的位置仅在x方向上存在偏移,又因为两个相机成像平面平行,所以两个相机的成像平面为为同一平面。
校正后的投影矩阵:
Pl:
[436.2345881250716, 0, 364.4412384033203, 0;
0, 436.2345881250716, 256.9516830444336, 0;
0, 0, 1, 0]
Pr:
[436.2345881250716, 0, 364.4412384033203, -48.01976295625924;
0, 436.2345881250716, 256.9516830444336, 0;
0, 0, 1, 0]
左侧 3×3 的矩阵为内参矩阵。
因为参数 flags 设置为 CALIB_ZERO_DISPARITY,所以校正后的两个相机的 principal point 相等,进而内参矩阵相等。
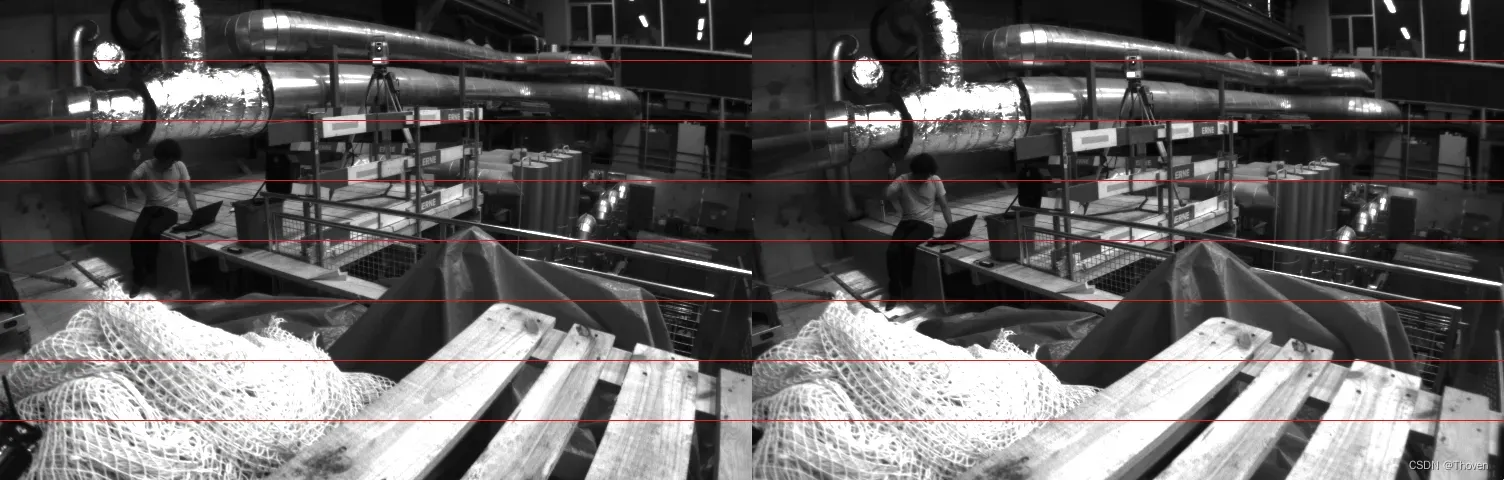
在校正前后双目图像中绘制与 x 轴平行的直线:
版权声明:本文为博主作者:Thoven原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/weixin_43196818/article/details/129184280