基于A* 算法的无人机三维路径规划算法,可以动态避障,自己可以规定设计障碍物位置,MATLAB编程实现。


随着无人机技术的快速发展和广泛应用,无人机路径规划算法成为了研究的热点之一。在无人机的飞行任务中,路径规划是其中至关重要的一环,它直接影响到飞行过程中的安全性和效率。而基于A*算法的无人机三维路径规划算法则成为了一种非常有效和广泛应用的方法。
无人机的三维路径规划算法需要考虑到多个因素,其中最重要的就是避障功能。在无人机飞行过程中,避免与障碍物的碰撞是保证飞行安全的基本要求之一。传统的路径规划算法能够实现无人机的基本飞行路径规划,但是对于动态环境中的障碍物避障问题,传统算法往往会出现一定的局限性。而基于A*算法的无人机三维路径规划算法能够在动态避障方面取得很好的效果。
A*算法是一种启发式搜索算法,它在路径规划领域被广泛应用。它基于启发函数来评估节点的价值,并根据节点的价值来选择下一步移动的方向。这种算法能够高效地找到最优或接近最优的路径。在无人机路径规划中,A*算法可以根据无人机的起始位置和目标位置,通过动态避障函数来规避飞行路径上的障碍物。
在实际应用中,基于A*算法的无人机三维路径规划算法可以通过MATLAB进行编程实现。MATLAB作为一种强大的数学计算和科学工程软件,提供了许多开发和调试算法的工具和函数。开发人员可以利用MATLAB的优势,结合A*算法的思想和飞行环境的要求,设计出具有动态避障功能的无人机路径规划算法。
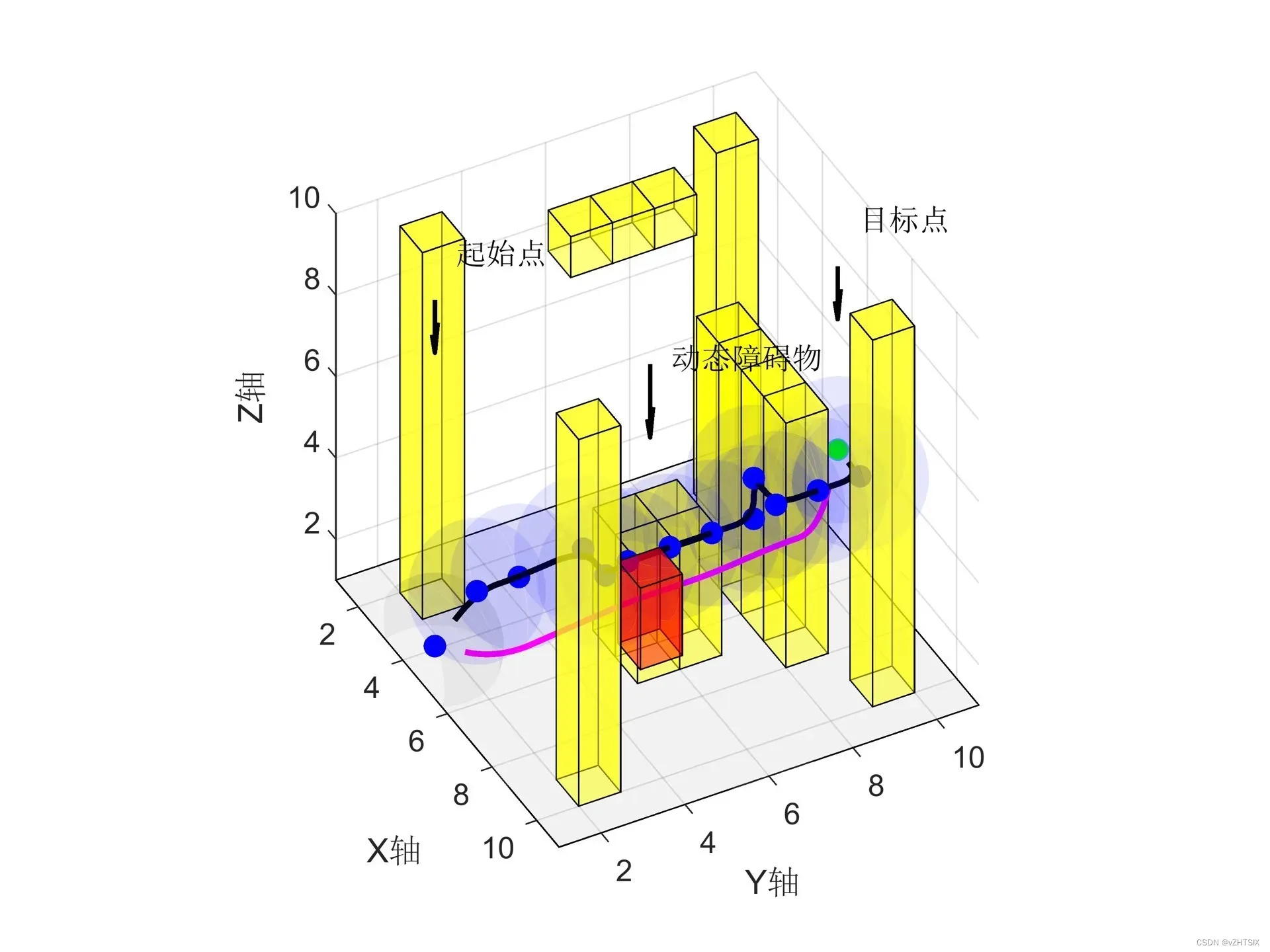
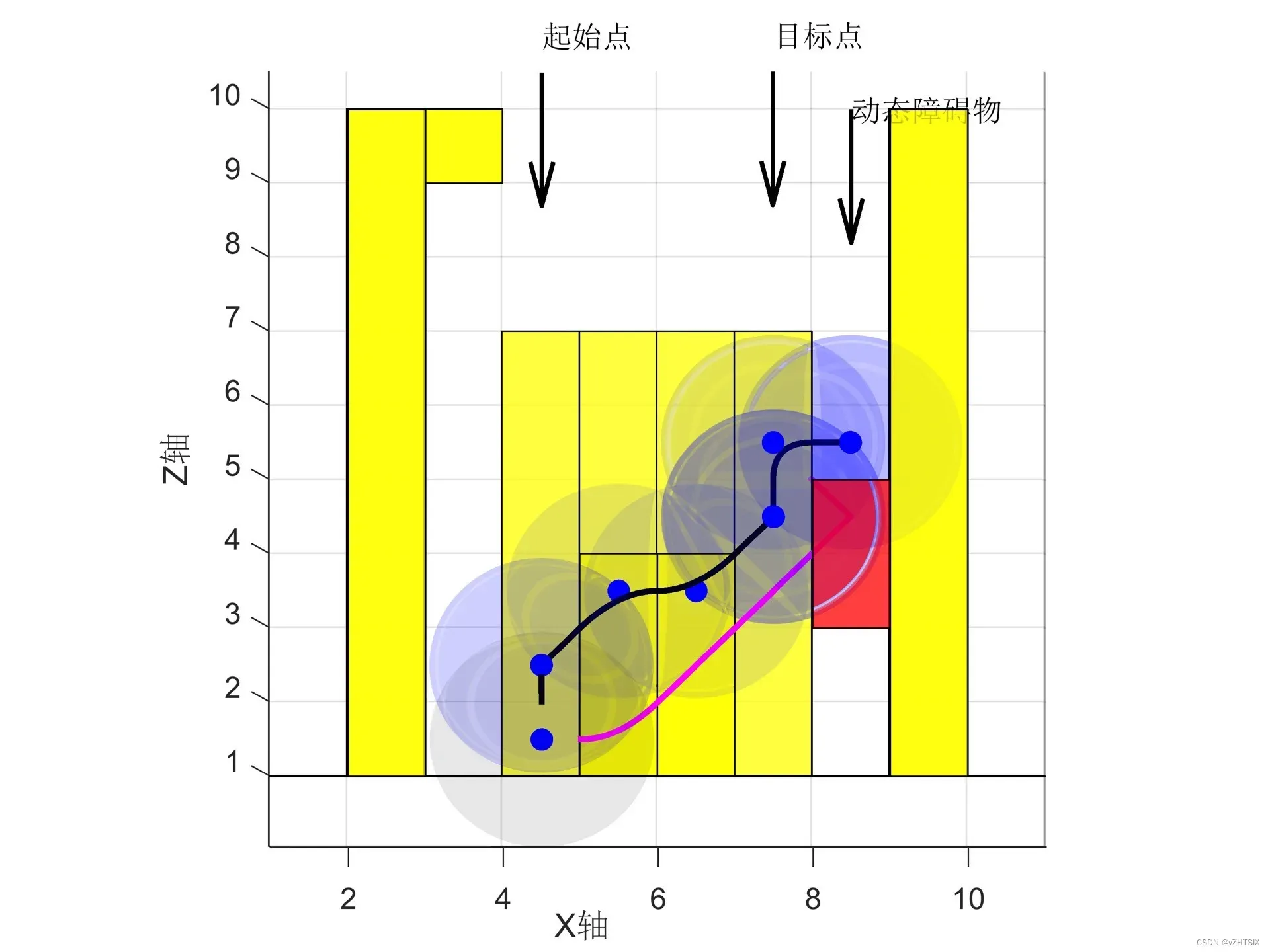
在算法实现过程中,可以通过规定设计障碍物的位置来测试无人机路径规划算法的性能。通过A*算法以及自定义的动态避障函数,无人机可以在遇到障碍物时及时做出反应,并选择合适的路径绕过障碍物。同时,还可以通过调整算法的启发函数和路径评估策略,进一步优化无人机路径规划的效果。
综上所述,基于A*算法的无人机三维路径规划算法是一种非常高效和灵活的方法,可以在动态避障方面取得良好的效果。通过MATLAB的编程实现,无人机可以根据飞行环境和自定义的障碍物位置,实现安全高效的飞行路径规划。未来,随着无人机技术的进一步发展,基于A*算法的无人机路径规划算法将得到更加广泛的应用和研究。
相关代码,程序地址:http://lanzoup.cn/761541576795.html
版权声明:本文为博主作者:vZHTSIX原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/vZHTSIX/article/details/136797348