1. 可变形卷积原理解析
1.1 普通卷积原理
传统的卷积操作是将特征图分成一个个与卷积核大小相同的部分,然后进行卷积操作,每部分在特征图上的位置都是固定的。

图1 普通卷积过程
图1所示为普通卷积在输入特征图上进行卷积计算的过程,卷积核大小为3*3,在输入特征图尺寸为7*7上进行卷积,将卷积核权重与输入特征图对应位置元素相乘并求和得到输出特征图元素,按一定方式滑动窗口就能计算得到整张输出特征图。
因此,对于输入特征图上任意一点,卷积操作可表示为:
公式1 卷积操作公式
其中,代表卷积核中每一个点相对于中心点的偏移量,可用如下公式表示(3*3卷积核为例):
公式2 卷积核点相对偏移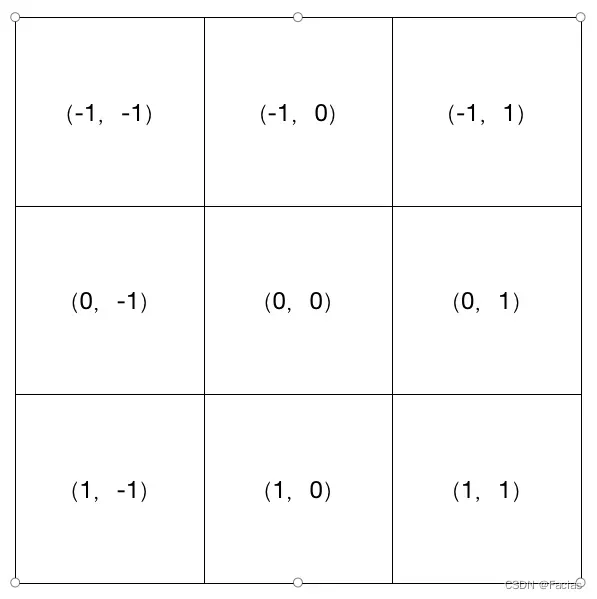
图2 3*3卷积核点相对偏移示例图
表示卷积核对应位置的权重,
表示输入特征图上
位置处的元素值,
表示输出特征图上
位置的元素值,由卷积核与输入特征图进行卷积得到。
1.2 可变形卷积思想
常规卷积的卷积核为固定的大小与形状,对于形状规则的物体可能会有更好的效果,那如果遇到形变比较复杂的物体呢?
一般来讲,可采用的做法有:丰富数据集、引入更多复杂形变的样本,使用各种数据增强和tricks,人工设计一些手工特征和算法等等,那么是否可以采用更加灵活的卷积核呢?于是可变形卷积–Deformable Conv出现了。
先来一张图感受一下,图3为标准卷积与可变形卷积的卷积示例。
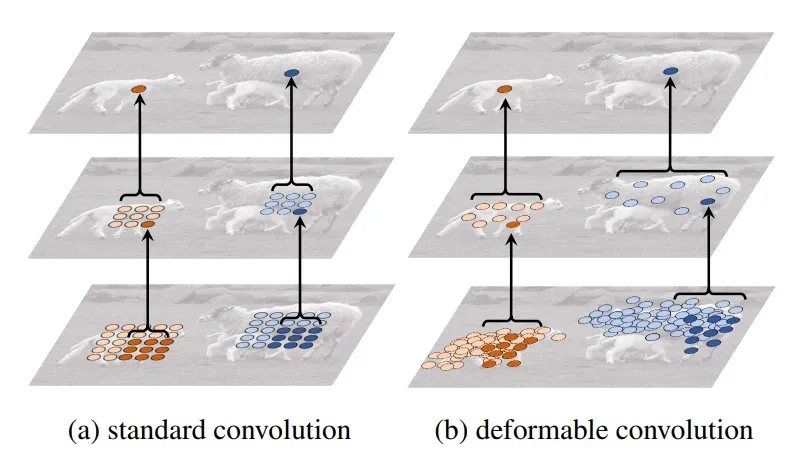
图3 标准卷积与可变形卷积的卷积示例
通过左右对比可以明显的看出,可变形卷积的采样位置更符合物体本身的形状和尺寸,而标准卷积的形式却不能做到这一点。能够明显的看到可变性卷积顶层特征图中最终的特征点学习了物体的整体特征,这个特征只针对于物体本身,相比原始的卷积它更能排除背景噪声的干扰,得到更有用的信息。
1.3 可变形卷积原理
从图2可以看出,可变形卷积的采样位置是可变的,或者说是可学习的,因此可变形卷积可以更好的考虑到物体形状变化。
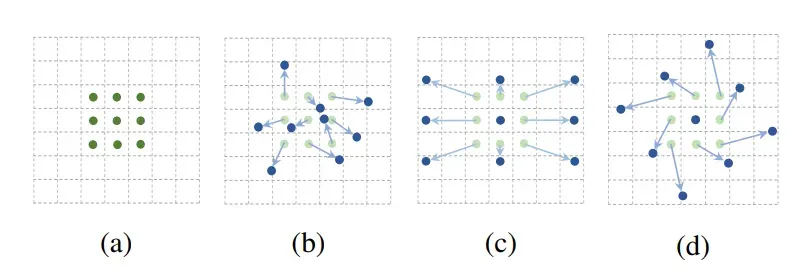
图4 可变形卷积的不同采用点
图4中(a)是常见的3×3卷积核的采样方式,(b)是采样可变形卷积,加上偏移量之后的采样点的变化,其中(c)(d)是可变形卷积的特殊形式。
因此可形变卷积的原理是基于一个网络学习offset(偏移),使得卷积核在input feature map的采样点发生偏移,集中于我们感兴趣的区域或者目标。
可变形卷积则在公式1的基础上为每个点引入了一个偏移量,偏移量是由输入特征图与另一个卷积生成的,通常是小数。
公式3 可变形卷积操作公式
其中, 表示偏移量。
由于加入偏移量后的位置一般为小数,并不对应输入特征图上实际的像素点,因此需要使用插值来得到偏移后的像素值,通常可采用双线性插值,用公式表示如下:
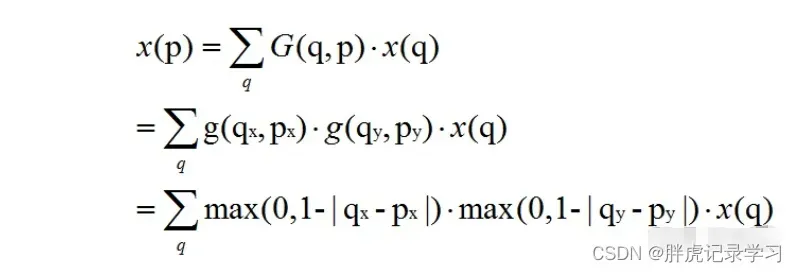
公式4 双线性插值
其中,公式中最后一行的max(0, 1-…)限制了插值点与邻域点不超过1个像素的距离。
双线性插值是指将插值点位置的像素值设为其4邻域像素点的加权和,邻域4个点是离其最近的在特征图上实际存在的像素点,每个点的加权权重则根据它与插值点横、纵坐标的距离来设置,最终得到插值点的像素值。

图5 双线性插值示例图
根据4个点的加权和计算得到P点的像素值,各点权重由各点距离P点的距离确定。
1.4 可变形卷积
图6为可变形卷积示意图。可以看到offsets(偏移)是额外使用一个卷积来生成的,与最终要做卷积操作那个卷积不是同一个 。图示N为卷积核区域大小,例如3*3大小的卷积核,N=9,图中绿色过程为卷积学习偏移的过程,其中offset field的通道大小为2N,表示卷积核分别学习x方向与y方向的偏移量。
图6所示,在input feature map上普通卷积操作对应卷积采样区域是一个卷积核大小的正方形(绿框),而可变形卷积对应的卷积采样区域为一些蓝框表示的点,这就是可变形卷积与普通卷积的区别。

图6 可变形卷积示意图
可变形卷积的具体细节:
- 一个output feature map上的点对应到input feature map上的卷积采样区域大小为K*K,按照可变形卷积的操作,这K*K区域的每一个卷积采样点都要学习一个偏离量offset,而offset是用坐标表示的,所以一个output要学习2*K*K个参数。假设一个output大小为H*W,所以一共要学习2*K*K*H*W个参数。即上图的offset field(N=K*K),其维度为B*2*K*K*H*W,其中B代表batch_size;
- 假设input feature map的维度为B*C*H*W,一个batch内的特征图(一共C个)共用一个offset field,即一个batch内的每张特征图用到的偏移量是一样的;
- 可变形卷积不改变input feature map的尺寸,所以output feature map也为H x W;
2. 可变形卷积的实现
2.1 可变形卷积实现流程:
借鉴了博主Facias的代码实现逻辑图,具体实现看代码。
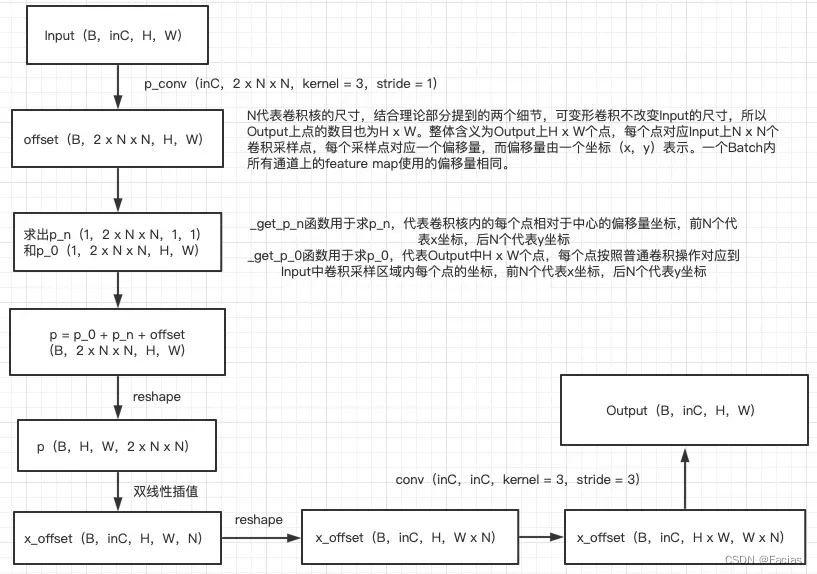
图7 可变形卷积实现流程
2.2 可变形卷积torch实现
class DeformConv2d(nn.Module):
def __init__(self, inc, outc, kernel_size=3, padding=1, stride=1, bias=None, modulation=False):
"""
Args:
modulation (bool, optional): If True, Modulated Defomable Convolution (Deformable ConvNets v2).
"""
super(DeformConv2d, self).__init__()
self.kernel_size = kernel_size
self.padding = padding
self.stride = stride
self.zero_padding = nn.ZeroPad2d(padding)
# conv则是实际进行的卷积操作,注意这里步长设置为卷积核大小,因为与该卷积核进行卷积操作的特征图是由输出特征图中每个点扩展为其对应卷积核那么多个点后生成的。
self.conv = nn.Conv2d(inc, outc, kernel_size=kernel_size, stride=kernel_size, bias=bias)
# p_conv是生成offsets所使用的卷积,输出通道数为卷积核尺寸的平方的2倍,代表对应卷积核每个位置横纵坐标都有偏移量。
self.p_conv = nn.Conv2d(inc, 2*kernel_size*kernel_size, kernel_size=3, padding=1, stride=stride)
nn.init.constant_(self.p_conv.weight, 0)
self.p_conv.register_backward_hook(self._set_lr)
self.modulation = modulation # modulation是可选参数,若设置为True,那么在进行卷积操作时,对应卷积核的每个位置都会分配一个权重。
if modulation:
self.m_conv = nn.Conv2d(inc, kernel_size*kernel_size, kernel_size=3, padding=1, stride=stride)
nn.init.constant_(self.m_conv.weight, 0)
self.m_conv.register_backward_hook(self._set_lr)
@staticmethod
def _set_lr(module, grad_input, grad_output):
grad_input = (grad_input[i] * 0.1 for i in range(len(grad_input)))
grad_output = (grad_output[i] * 0.1 for i in range(len(grad_output)))
def forward(self, x):
offset = self.p_conv(x)
if self.modulation:
m = torch.sigmoid(self.m_conv(x))
dtype = offset.data.type()
ks = self.kernel_size
N = offset.size(1) // 2
if self.padding:
x = self.zero_padding(x)
# (b, 2N, h, w)
p = self._get_p(offset, dtype)
# (b, h, w, 2N)
p = p.contiguous().permute(0, 2, 3, 1)
q_lt = p.detach().floor()
q_rb = q_lt + 1
q_lt = torch.cat([torch.clamp(q_lt[..., :N], 0, x.size(2)-1), torch.clamp(q_lt[..., N:], 0, x.size(3)-1)], dim=-1).long()
q_rb = torch.cat([torch.clamp(q_rb[..., :N], 0, x.size(2)-1), torch.clamp(q_rb[..., N:], 0, x.size(3)-1)], dim=-1).long()
q_lb = torch.cat([q_lt[..., :N], q_rb[..., N:]], dim=-1)
q_rt = torch.cat([q_rb[..., :N], q_lt[..., N:]], dim=-1)
# clip p
p = torch.cat([torch.clamp(p[..., :N], 0, x.size(2)-1), torch.clamp(p[..., N:], 0, x.size(3)-1)], dim=-1)
# bilinear kernel (b, h, w, N)
g_lt = (1 + (q_lt[..., :N].type_as(p) - p[..., :N])) * (1 + (q_lt[..., N:].type_as(p) - p[..., N:]))
g_rb = (1 - (q_rb[..., :N].type_as(p) - p[..., :N])) * (1 - (q_rb[..., N:].type_as(p) - p[..., N:]))
g_lb = (1 + (q_lb[..., :N].type_as(p) - p[..., :N])) * (1 - (q_lb[..., N:].type_as(p) - p[..., N:]))
g_rt = (1 - (q_rt[..., :N].type_as(p) - p[..., :N])) * (1 + (q_rt[..., N:].type_as(p) - p[..., N:]))
# (b, c, h, w, N)
x_q_lt = self._get_x_q(x, q_lt, N)
x_q_rb = self._get_x_q(x, q_rb, N)
x_q_lb = self._get_x_q(x, q_lb, N)
x_q_rt = self._get_x_q(x, q_rt, N)
# (b, c, h, w, N)
x_offset = g_lt.unsqueeze(dim=1) * x_q_lt +
g_rb.unsqueeze(dim=1) * x_q_rb +
g_lb.unsqueeze(dim=1) * x_q_lb +
g_rt.unsqueeze(dim=1) * x_q_rt
# modulation
if self.modulation:
m = m.contiguous().permute(0, 2, 3, 1)
m = m.unsqueeze(dim=1)
m = torch.cat([m for _ in range(x_offset.size(1))], dim=1)
x_offset *= m
x_offset = self._reshape_x_offset(x_offset, ks)
out = self.conv(x_offset)
return out
def _get_p_n(self, N, dtype):
# 由于卷积核中心点位置是其尺寸的一半,于是中心点向左(上)方向移动尺寸的一半就得到起始点,向右(下)方向移动另一半就得到终止点
p_n_x, p_n_y = torch.meshgrid(
torch.arange(-(self.kernel_size-1)//2, (self.kernel_size-1)//2+1),
torch.arange(-(self.kernel_size-1)//2, (self.kernel_size-1)//2+1))
# (2N, 1)
p_n = torch.cat([torch.flatten(p_n_x), torch.flatten(p_n_y)], 0)
p_n = p_n.view(1, 2*N, 1, 1).type(dtype)
return p_n
def _get_p_0(self, h, w, N, dtype):
# p0_y、p0_x就是输出特征图每点映射到输入特征图上的纵、横坐标值。
p_0_x, p_0_y = torch.meshgrid(
torch.arange(1, h*self.stride+1, self.stride),
torch.arange(1, w*self.stride+1, self.stride))
p_0_x = torch.flatten(p_0_x).view(1, 1, h, w).repeat(1, N, 1, 1)
p_0_y = torch.flatten(p_0_y).view(1, 1, h, w).repeat(1, N, 1, 1)
p_0 = torch.cat([p_0_x, p_0_y], 1).type(dtype)
return p_0
# 输出特征图上每点(对应卷积核中心)加上其对应卷积核每个位置的相对(横、纵)坐标后再加上自学习的(横、纵坐标)偏移量。
# p0就是将输出特征图每点对应到卷积核中心,然后映射到输入特征图中的位置;
# pn则是p0对应卷积核每个位置的相对坐标;
def _get_p(self, offset, dtype):
N, h, w = offset.size(1)//2, offset.size(2), offset.size(3)
# (1, 2N, 1, 1)
p_n = self._get_p_n(N, dtype)
# (1, 2N, h, w)
p_0 = self._get_p_0(h, w, N, dtype)
p = p_0 + p_n + offset
return p
def _get_x_q(self, x, q, N):
# 计算双线性插值点的4邻域点对应的权重
b, h, w, _ = q.size()
padded_w = x.size(3)
c = x.size(1)
# (b, c, h*w)
x = x.contiguous().view(b, c, -1)
# (b, h, w, N)
index = q[..., :N]*padded_w + q[..., N:] # offset_x*w + offset_y
# (b, c, h*w*N)
index = index.contiguous().unsqueeze(dim=1).expand(-1, c, -1, -1, -1).contiguous().view(b, c, -1)
x_offset = x.gather(dim=-1, index=index).contiguous().view(b, c, h, w, N)
return x_offset
@staticmethod
def _reshape_x_offset(x_offset, ks):
b, c, h, w, N = x_offset.size()
x_offset = torch.cat([x_offset[..., s:s+ks].contiguous().view(b, c, h, w*ks) for s in range(0, N, ks)], dim=-1)
x_offset = x_offset.contiguous().view(b, c, h*ks, w*ks)
return x_offset参考:
更灵活、有个性的卷积——可变形卷积(Deformable Conv)
DeformableConv(可形变卷积)理论和代码分析
仅为学习记录,侵删!
文章出处登录后可见!