本专栏教程将记录从安装carla到调用carla的pythonAPI进行车辆操控并采集数据的全流程,带领大家从安装carla开始,到最终能够熟练使用carla仿真环境进行传感器数据采集和车辆控制.
第五节 使用ros与carla通信
本小节的主要内容是介绍carla中的如何使用ros进行通信.
- 章节内容介绍:
第1,2小节介绍了ROS和carla_ros_bridge的安装.
第3小节介绍了如何设置carla_ros_bridge运行参数,并打开一个可以手动驾驶的ros节点.还介绍了能够提供给ros接口的传感器信息.
第4小节介绍了如何通过ros发送控制指令让车动起来.并且介绍了如何使用rviz查看车辆的部分传感器信息.
文章目录
- 第五节 使用ros与carla通信
- 1.安装ROS
- 2.安装carla_ros_bridge
- 2.1 创建虚拟环境
- 2.2 通过apt安装carla-ros-bridge
- 2.3 配置环境变量并运行
- 3.运行carla_ros_bridge
- 3.1 roslaunch参数设置
- 3.2 运行一个手动驾驶ros节点
- 3.3 carla_ros_bridge能够提供的传感器信息
- 4.通过ros与carla交互
- 4.1 通过发布ros消息让车动起来
- 4.2 通过rviz查看传感器数据
- 5 挑战性的任务
- 参考链接
- 异常处理
- 问题1.打开手动驾驶脚本后画面很黑
1.安装ROS
安装ros可以使用鱼香ROS的网站上的一键安装进行安装.carla_ros_bridge支持ROS1和ROS2,本文使用ROS1.
小鱼的一键安装系列-
- carla_ros_bridge的ROS版本支持:
ROS Melodic — For Ubuntu 18.04 (Bionic)
ROS Noetic — For Ubuntu 20.04 (Focal) - carla版本支持:
CARLA 0.9.7 or later
本教程使用carla0.9.12,ROS Melodic
2.安装carla_ros_bridge
安装方式有两种:第一种apt安装,第二种是源码安装.
源码安装可能会遇到很多依赖库的问题,而apt安装比较方便,并且适用于ubuntu1804系统,所以这里推荐选择apt安装.
2.1 创建虚拟环境
ros-bridge 需要安装到 python2.7 的环境中。
conda create -n py27 python=2.7
激活虚拟环境:
conda activate py27
换源,并安装依赖:
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple
pip install opencv-python==4.2.0.32
pip install networkx
pip install rospkg
pip install rospy
pip install simple_pid
pip install transforms3d
pip install networkx
pip install enum
pip install pygame
2.2 通过apt安装carla-ros-bridge
添加镜像源:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 1AF1527DE64CB8D9
sudo add-apt-repository "deb [arch=amd64] http://dist.carla.org/carla $(lsb_release -sc) main"
sudo apt-get update
apt安装
sudo apt-get install carla-ros-bridge
这里看到安装的版本其实是0.9.10版本,但是不影响我们后面的使用.

2.3 配置环境变量并运行
首先运行carla服务器:
./CarlaUE4.sh
然后我们需要切换到py27的虚拟环境
conda activate py27
指定carla的目录,并验证一下是否正确:
export CARLA_ROOT=/home/lbw/Carla/recompressed/carla-0.9.12
export PYTHONPATH=$PYTHONPATH:$CARLA_ROOT/PythonAPI/carla/dist/carla-0.9.12-py2.7-linux-x86_64.egg:$CARLA_ROOT/PythonAPI/carla
python -c 'import carla;print("Success")'
如果打印了success说明pythonAPI路径配置成功.
在终端中source一下环境变量:
source /opt/carla-ros-bridge/melodic/setup.bash
运行一下:
roslaunch carla_ros_bridge carla_ros_bridge.launch
使用rostopic list可以查看到carla发布的消息:
- 为了日后启动方便,我们直接添加到.bashrc里面
gedit ~/.bashrc
在脚本中写入(需要在# >>> conda initialize >>>之前):
source /opt/carla-ros-bridge/melodic/setup.bash
export CARLA_ROOT=/home/lbw/Carla/recompressed/carla-0.9.12
export PYTHONPATH=$PYTHONPATH:$CARLA_ROOT/PythonAPI/carla/dist/carla-0.9.12-py2.7-linux-x86_64.egg:$CARLA_ROOT/PythonAPI/carla
3.运行carla_ros_bridge
运行carla_ros_bridge前,我们都需要切换到py27的虚拟环境中,否则会引起报错.
3.1 roslaunch参数设置
在roslaunch carla_ros_bridge carla_ros_bridge.launch 后面是可以加参数的,例如可以通过host and port改服务器地址,可以通过town修改地图.
后缀运行参数的格式是:=,例如:passive:=True.
在运行多个客户端时,carla_ros_bridge这个客户端会自动获得更新的优先权,会优先对世界进行tick,也就是更新.除非我们设置passive:=True.
carla_ros_bridge默认工作在synchronous_mode下,等待所有传感器消息都传回来才会进行下一次更新,确保更新频率的一致.
carla_ros_bridge默认是订阅所有传感器的,即register_all_sensors:=True
默认配置存储路径:
/opt/carla-ros-bridge/melodic/share/carla_ros_bridge/config
其他参数的具体说明如下:
- use_sim_time: This should be set to True to ensure that ROS is using simulation time rather than system time. This parameter will synchronize the ROS /clock topic with CARLA simulation time.
- host and port: Network settings to connect to CARLA using a Python client.
- timeout: Time to wait for a successful connection to the server.
- passive: Passive mode is for use in scynchronous mode. When enabled, the ROS bridge will take a backseat and another client must tick the world. ROS bridge will wait for all expected data from all sensors to be received.
- synchronous_mode:
If false: Data is published on every world.on_tick() and every sensor.listen() callback.
If true (default): ROS bridge waits for all the sensor messages expected before the next tick. This might slow down the overall simulation but ensures reproducible results. - synchronous_mode_wait_for_vehicle_control_command: In synchronous mode, pauses the tick until a vehicle control is completed.
- fixed_delta_seconds: Simulation time (delta seconds) between simulation steps. It must be lower than 0.1. Take a look at the documentation to learn more about this.
- ego_vehicle: Role names to identify ego vehicles. Relevant topics will be created so these vehicles will be able to be controlled from ROS.
- town: Either use an available CARLA town (eg. ‘town01’) or an OpenDRIVE file (ending in .xodr).
- register_all_sensors:
If false: Only sensors spawned by the bridge are registered.
If true (default): All the sensors present in the simulation are registered.
3.2 运行一个手动驾驶ros节点
首先需要运行carla服务器:
./CarlaUE4.sh
之后使用roslaunch打开官方提供carla_ros_bridge_with_example_ego_vehicle脚本,设置地图为town01:
roslaunch carla_ros_bridge carla_ros_bridge_with_example_ego_vehicle.launch town:='town01'
这个脚本实际上是三个模块组成:
- carla_ros_bridge.launch
- carla_example_ego_vehicle.launch
- carla_manual_control.launch
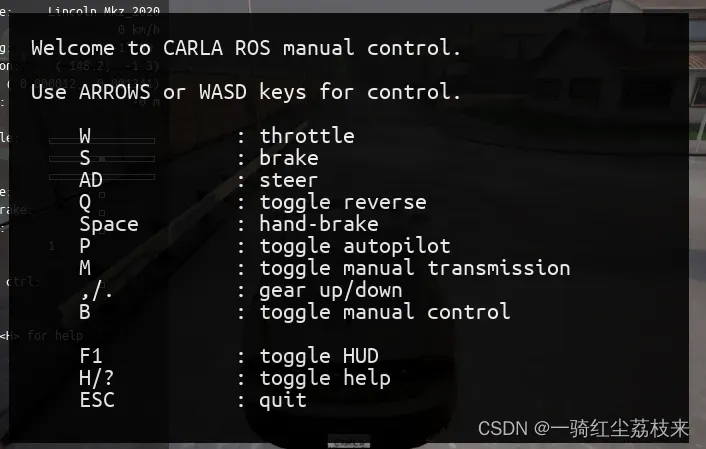
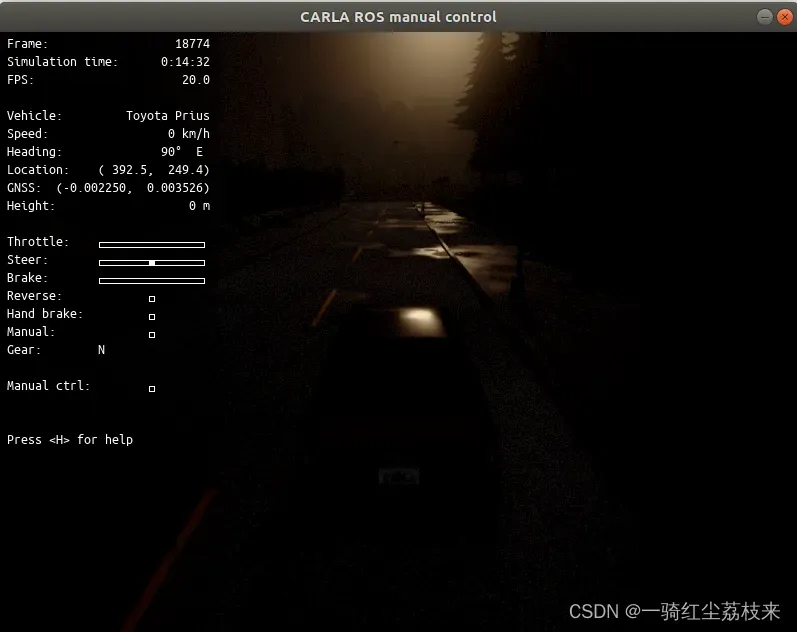
打开后,我们可以看到下面的界面:

如果你的画面显示比较暗,可以参考文章最后的异常处理的问题1的解决方法.
按H后弹出操控界面.可以看到,需要先按B启动手动控制,否则车是动不了的. 其他的操控方式和
3.3 carla_ros_bridge能够提供的传感器信息
我们打开传感器的配置文件:
sudo gedit /opt/carla-ros-bridge/melodic/share/carla_ego_vehicle/config/sensors.json
可以看到,里面涉及到的传感器有:
- 前视RGB相机
- 第三人称视角RGB相机
- 32线激光雷达lidar
- 毫米波雷达radar
- 全球卫星导航系统gnss
- 加速度计imu
- 障碍物传感器(carla)
- 车道线入侵传感器(carla)
除此之外,carla还提供很多其他的传感器,详细内容可参考官方文档:Sensors and data
在第4小节将详细介绍如何使用rviz查看传感器信息.
4.通过ros与carla交互
第四节讲解一下如何通过通过ros来订阅传感器的消息,并且发布ros消息对车辆油门刹车转向等进行控制.
4.1 通过发布ros消息让车动起来
在终端中使用下述命令可以实现车辆的直线运动.
rostopic pub /carla/ego_vehicle/vehicle_control_cmd carla_msgs/CarlaEgoVehicleControl "{throttle: 1.0, steer: 1.0}" -r 10
更加简单的操作是使用rqt来可视化的发送ros消息,在终端中输入
rqt
选择Plugins->Topics->Message Publisher 打开消息发布界面
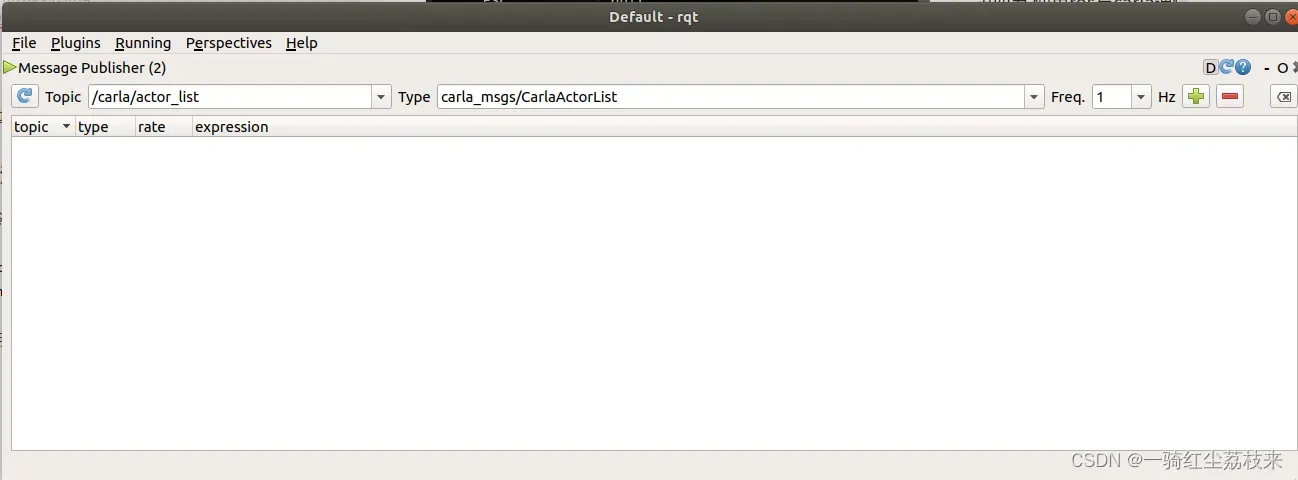
在Topic中选择/carla/ego_vehicle/vehicle_control_cmd,在Type中选择carla_msgs/CarlaEgoVehicleControl
然后点击加号:

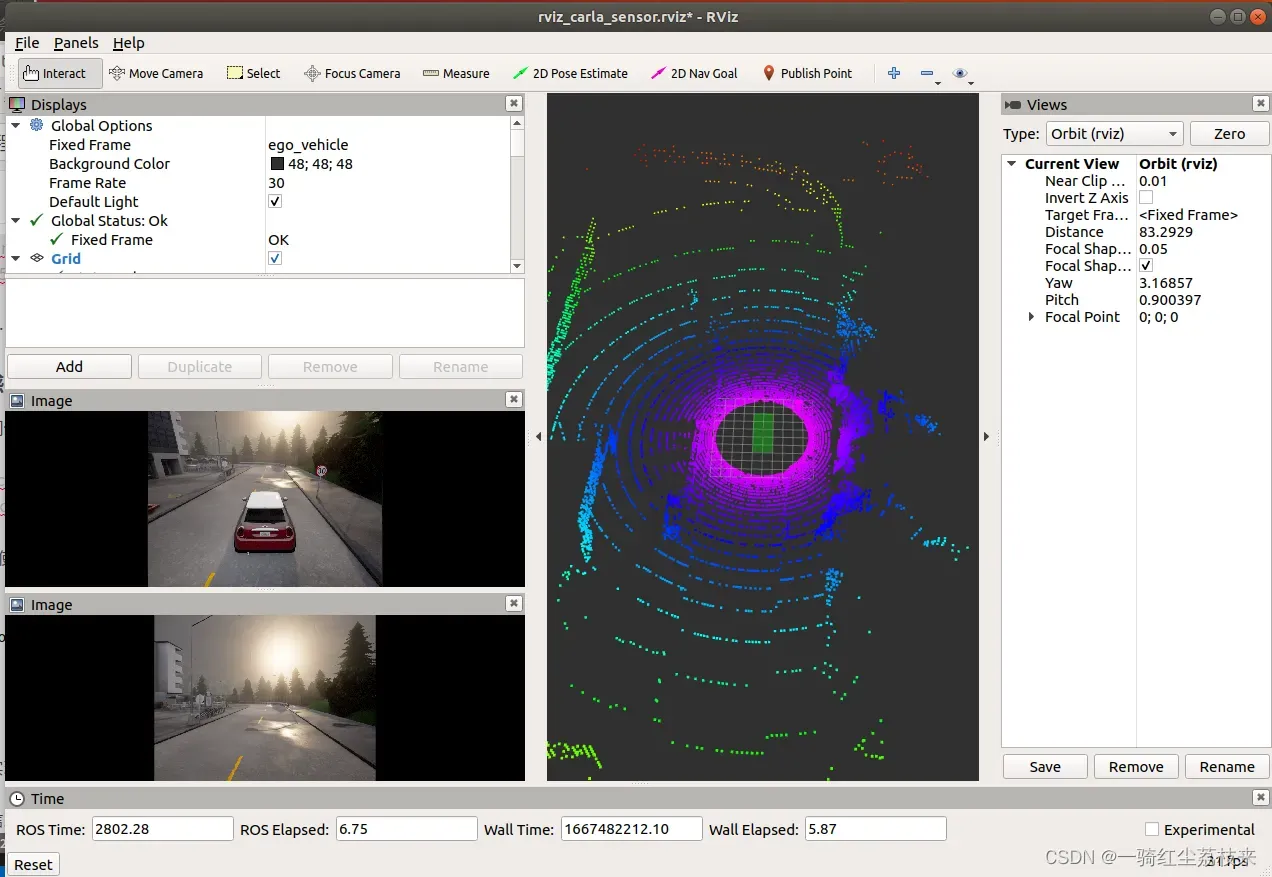
4.2 通过rviz查看传感器数据
为了方便的查看传感器信息,我们使用rviz来可视化.这里提供了一个已经配置好的rviz配置:
gitte代码库
找到rviz_carla_sensor.rviz,然后使用下面的命令打开rviz:
rosrun rviz rviz -d rviz_carla_sensor.rviz
可以看到如下界面:
5 挑战性的任务
通过订阅车辆的全局位置信息,实现从start到goal的完整行驶.
定位:通过订阅车辆的全局位置信息
感知:车道线检测(使用开源算法)
规划:全局路径规划+局部路径规划(使用开源算法)
定位和感知信息直接通过carla_ros_bridge获取,规划指令通过carla_ros_bridge发布.
可以查看[carla入门教程]-6 来获取比赛场景的创建.
参考链接
ROS bridge installation for ROS 1
ROS Bridge 笔记(01)— 简介、apt 安装、源码编译安装、安装依赖、运行显示
异常处理
问题1.打开手动驾驶脚本后画面很黑
如果打开后的画面很黑,说明相机曝光参数存在问题.
解决方法是需要调整一下相机曝光参数.具体做法为:
sudo gedit /opt/carla-ros-bridge/melodic/share/carla_ego_vehicle/config/sensors.json
修改相机参数:
"iso":200
改成:
"iso":3000
需要修改的有两处,"id": "front",和"id": "view",两个相机的参数都需要修改.
如果还不够亮,可以进一步调大iso.

文章出处登录后可见!