文章目录
- 前言
- 一、雷达基本性能
- 二、工作原理
- TOF原理
- 三、连接测试
- 四、在ROS中启动雷达
- 五、将雷达数据用起来(cartographer建图)
- 总结
前言
将N10雷达连接ROS主控(本次使用Nvidia Jetson nano+melodic系统进行测试),通过Ubuntu电脑或虚拟机查看构建好的地图。
一、雷达基本性能
N10雷达的扫描频率为6~12HZ的可调区间,对应可实现 0.48°~0.96°的角度分辨率,N10采用TOF的测距技术,每秒4500次的高速激光测距采样能力,可以在25米半径范围内进行360度全方位的激光测距扫描,并产生所在空间的平面点云地图信息。
二、工作原理
雷达涉及的适用领域广阔,针对教育市场而言,根据雷达使用的测距原理大体可分为三角测距与TOF测距两类。N10采用TOF测距(飞行时间测距)法。
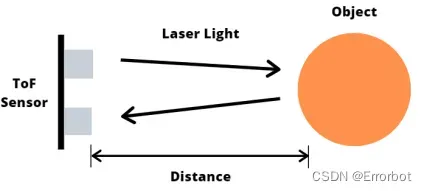
TOF原理
激光器发射一个激光脉冲,并由激光雷达上的计时器记录下发射的时间,发射光经接收器接收,并由计时器记录反射的时间。两个时间相减即得到了光的飞行时间,根据光速和时间即可计算距离。
三角测距雷达:外观低矮 ,近距离测量精度较高,但不抗强光,一般扫地机器人使用的三角测距雷达居多
TOF测距雷达:成本高的同时也提升了雷达的性能,测量距离远,测量精度高,可以抗光强,环境适应性好。适用于活动空间大,移动速度高的移动平台,如服务机器人、AGV、低速物流车。构建大面积环境的地图时可以使用TOF测距雷达可以保证地图的质量。
三、连接测试
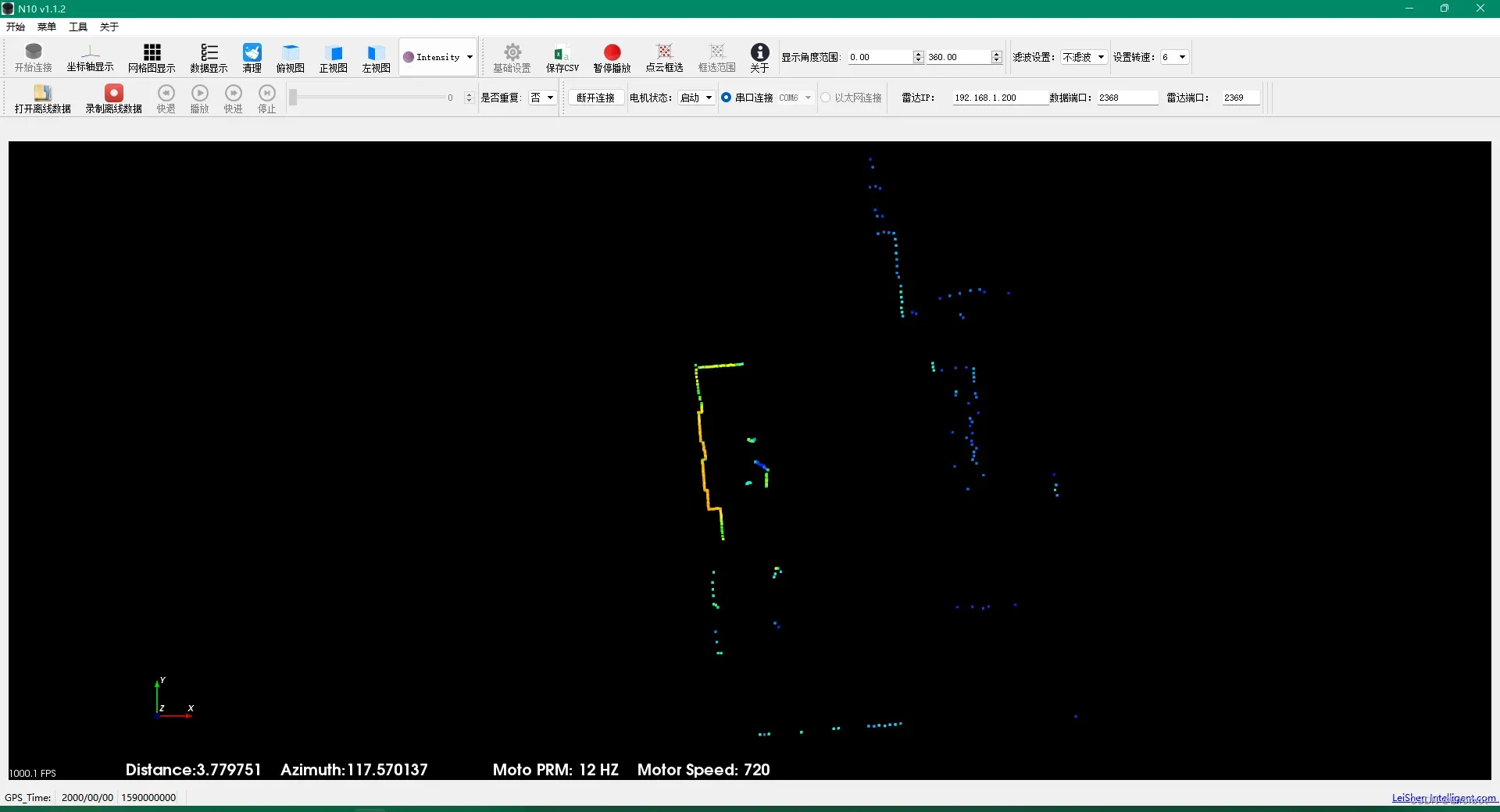
将使用Type-C线将n10通过转接板连接到windows电脑中测试点云数据:
使用Type-C线将n10通过转接板连接到jetson nano中,在Ubuntu系统中进行测试
](https://aitechtogether.com/wp-content/uploads/2023/06/4e022d93-eed6-4744-b05d-3f56439cc5b9.webp)
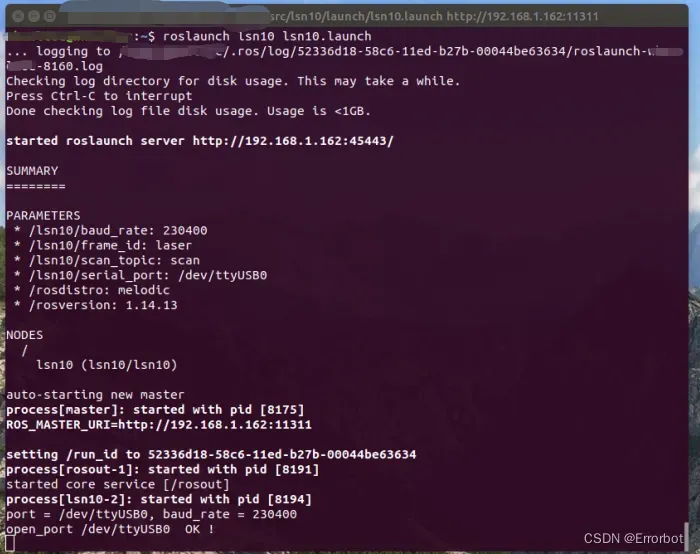
四、在ROS中启动雷达
编译雷达SDK后,启动雷达。
打开rviz可以看到雷达的点云信息
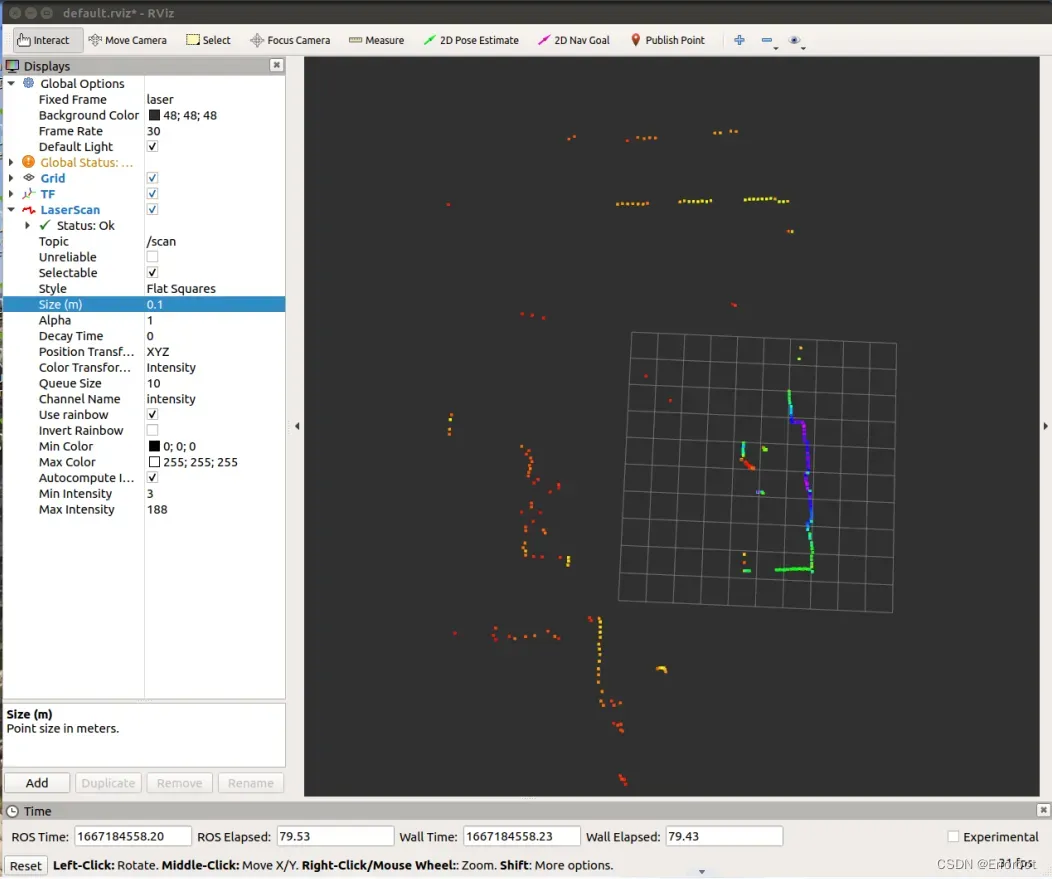
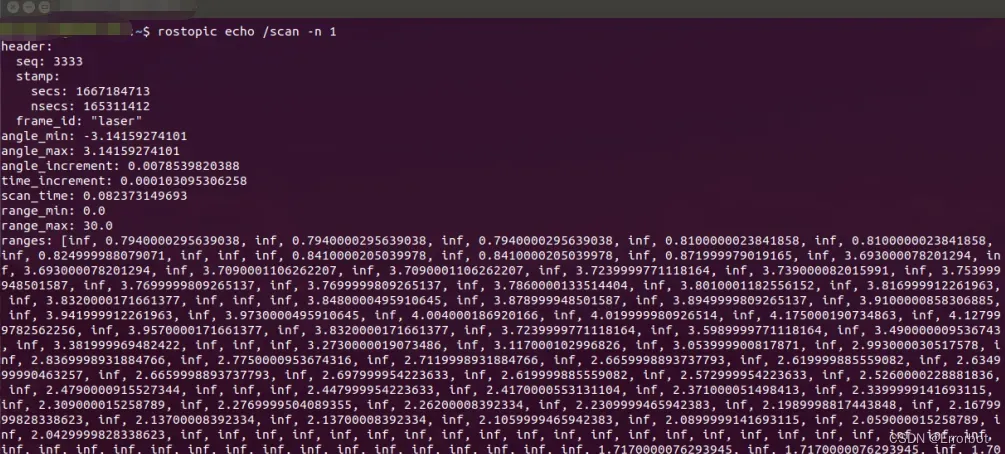
同时可以打印雷达的/scan数据:
五、将雷达数据用起来(cartographer建图)
二进制下载cartographer后,相关文件在/opt/ros/melodic/share/cartographer_ros路径下。
下载指令:
sudo apt-get install ros-melodic-cartographer* -y
2D建图主要用到demo_revo_lds.launch文件,这个文件默认是用来跑bag的,并未设置imu的接口。carto虽然是laser主导的算法,但如果只用雷达数据的话构建的地图会很模糊,需要融合imu的数据对机器人转向校准后进行建图。
修改文件:
/opt/ros/melodic/share/cartographer_ros/launch/demo_revo_lds.launch
接入imu数据:
<launch>
<param name="/use_sim_time" value="false" />
<arg name="imu_in_topic" default="/imu_data"/>
<arg name="imu_transform" default="true"/>
find cartographer_ros <node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename revo_lds.lua"
output="screen">
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
</launch>
同步修改revo_lds.lua文件,接收imu数据,只需要修改以下三个参数即可:
tracking_frame="base_footprint"
published_frame="base_footprint"
TRAJECTORY_BUILDER_2D.use_imu_data=true
打开雷达节点,同时需要开启imu模块,使之输出/imu_data话题:
roslaunch lsn10 lsn10.launch
启动cartographer建图:
roslaunch cartographer_ros demo_revo_lds.launch
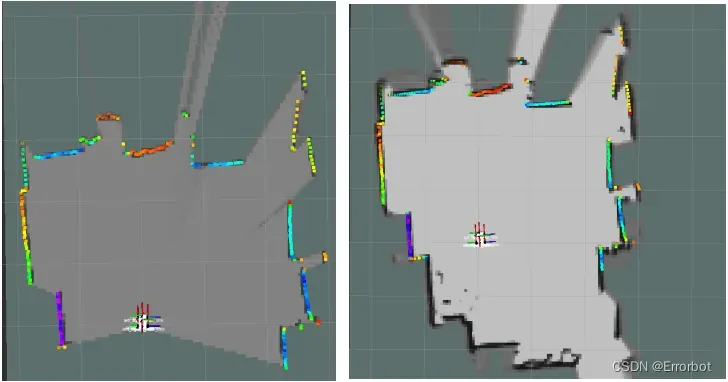
建图效果:
左边为雷达屏蔽一部分角度后初始构建的地图,右边是构建好的地图。
总结
对于刚入门ROS的开发者,如果需要完成建图导航路径规划及避障,如果项目预算有限可以选择这款高性价比的雷达;n10的测距精度比较高,且扫描频率也高,尺寸很小方便安装在机器人上,在TOF测距雷达中这款雷达价格比较低,雷达性能全面均衡,适合ROS入门开发者使用。
文章出处登录后可见!