本节介绍利用根轨迹法分析系统性能发热方法
本节介绍根轨迹校正
文章目录
利用根轨迹分析系统性能
利用根轨迹分析系统性能,主要还是看系统性能与零极点之间的关系。
有一下几个基本步骤:
- 绘制系统根轨迹
- 根据题意确定闭环极点
- 确定闭环零点
- 保留主导极点,利用零点极点法估算系统性能
主导极点法
对于稳定的高阶系统,闭环极点离虚轴越远,对应的相应分量衰减越快。所以即使系统存在多个零极点,也可以简化掉这些衰减太快的。
如果距离虚轴最近的极点周围没有零点,而其他极点有远离虚轴,就称这个闭环极点为主导极点。可以用这个主导极点近似一个二阶系统
如果一个极点旁边很近就有零点,称这种情况为“偶极子”,这时零点和极点对系统带来的影响可以认为相互低效,因此这种偶极子也需要忽略。
来看这个例题(主要是第三问):
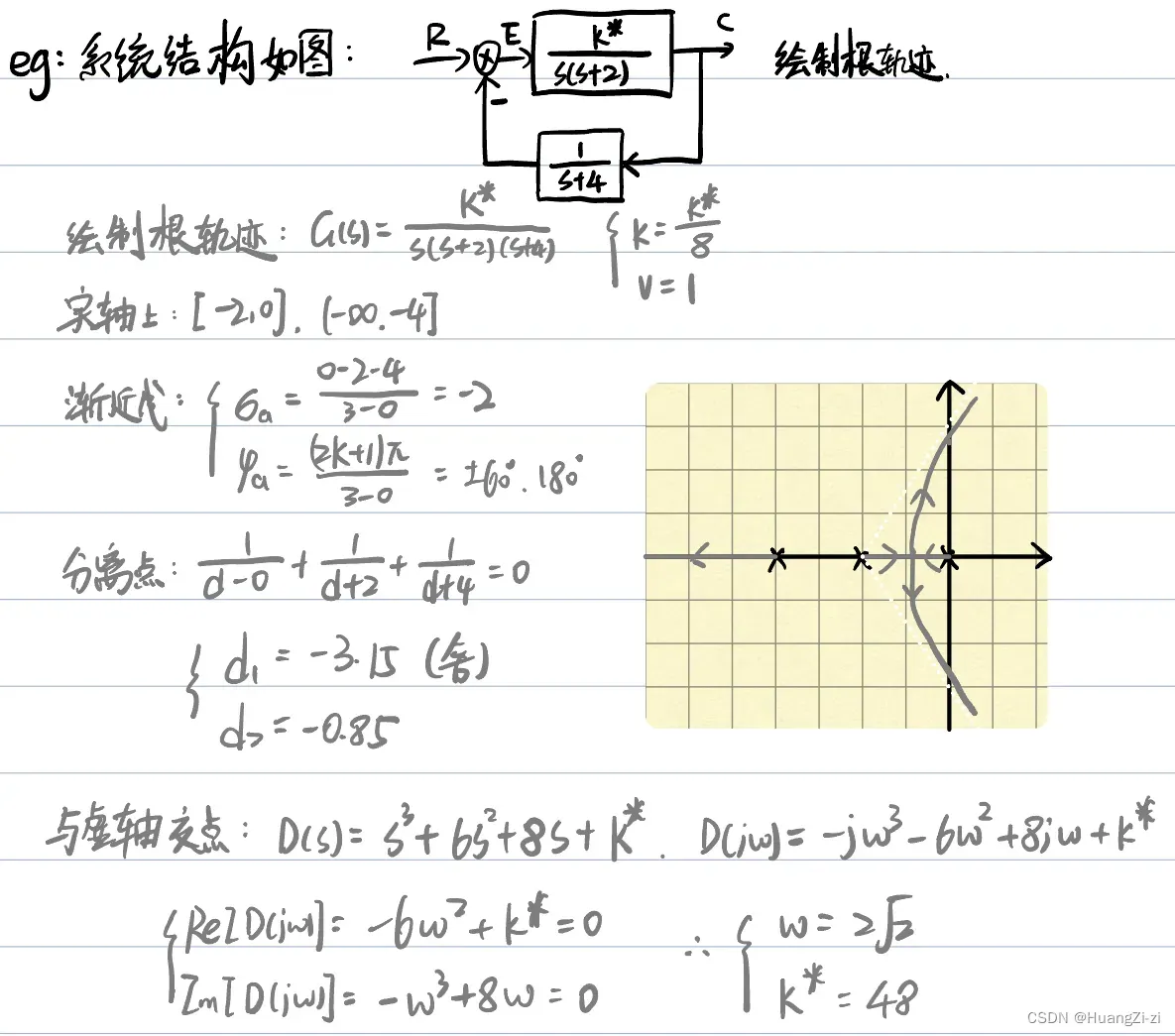
画根轨迹啥的,不再赘述了
第一问求稳定状态下增益的取值范围
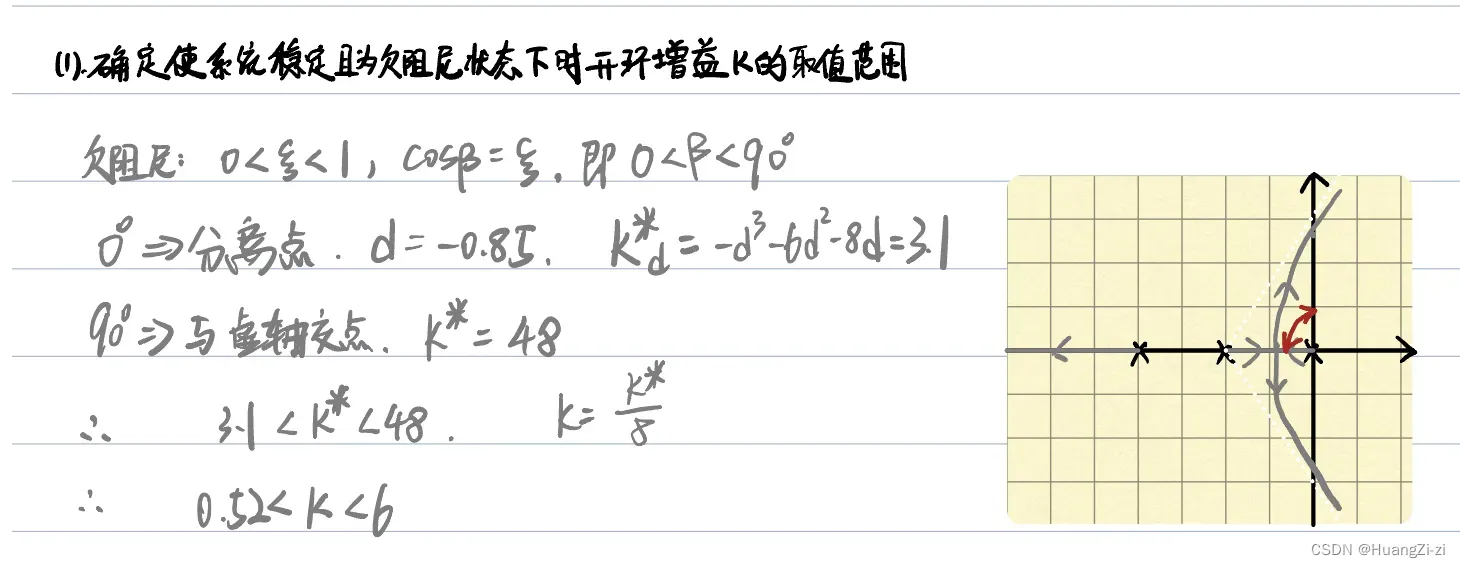
回顾一下,稳定充要条件所有极点都在虚轴左侧
欠阻尼表明极点不在实轴上也不在虚轴上
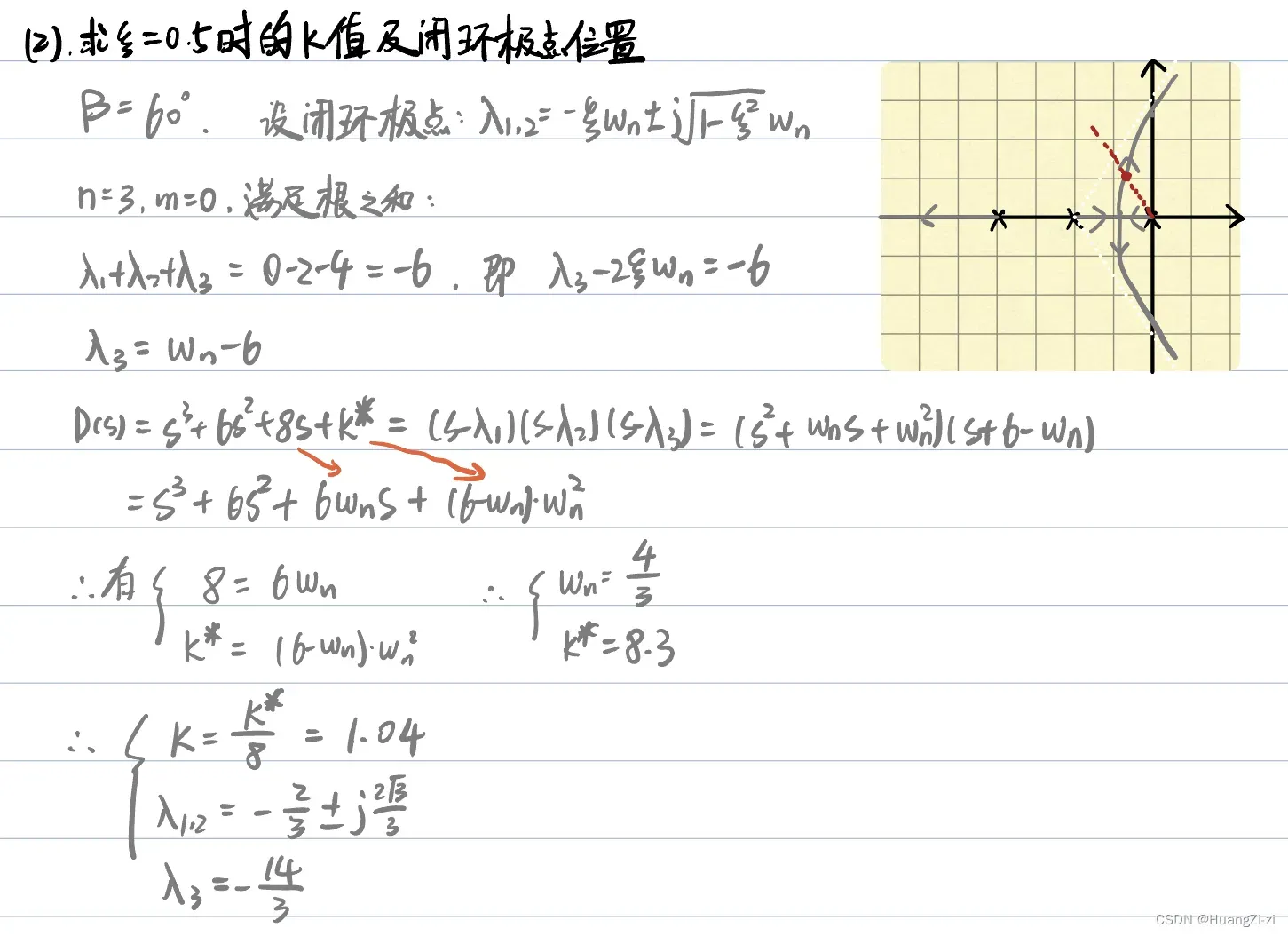
第二问让求某一个极点的具体参数。比较通用的方法就是当这个系统是二阶系统然后把极点设出来,再结合根轨迹的性质求点的座标。
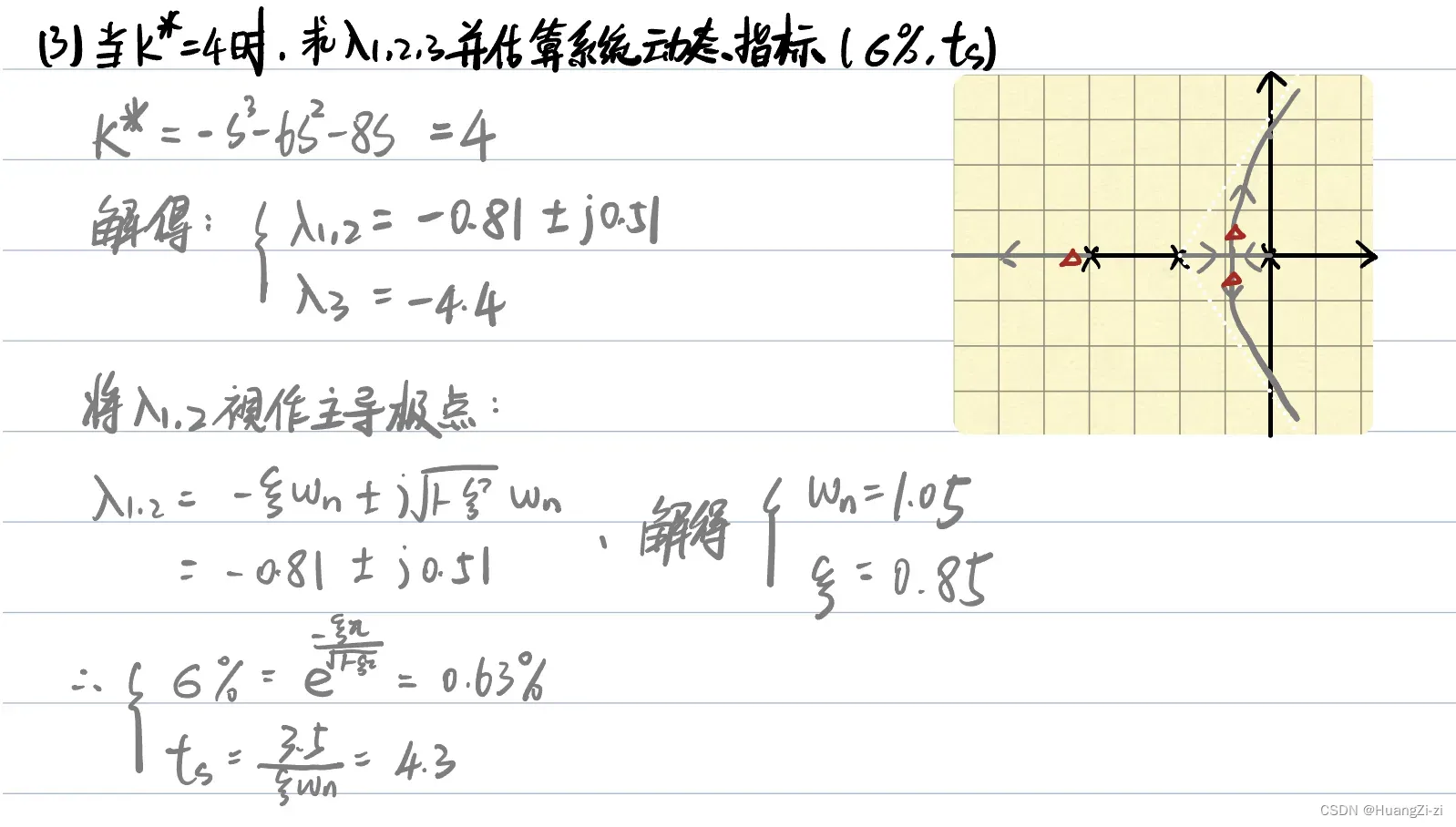
第三问要求估算性能指标。首先找出极点所在,根据到虚轴的距离,把最近的那一个作为主导极点。然后就可以按照二阶系统来求解。这里是估算,就不需要考虑零点和非主导极点了。
增加零极点对系统的影响
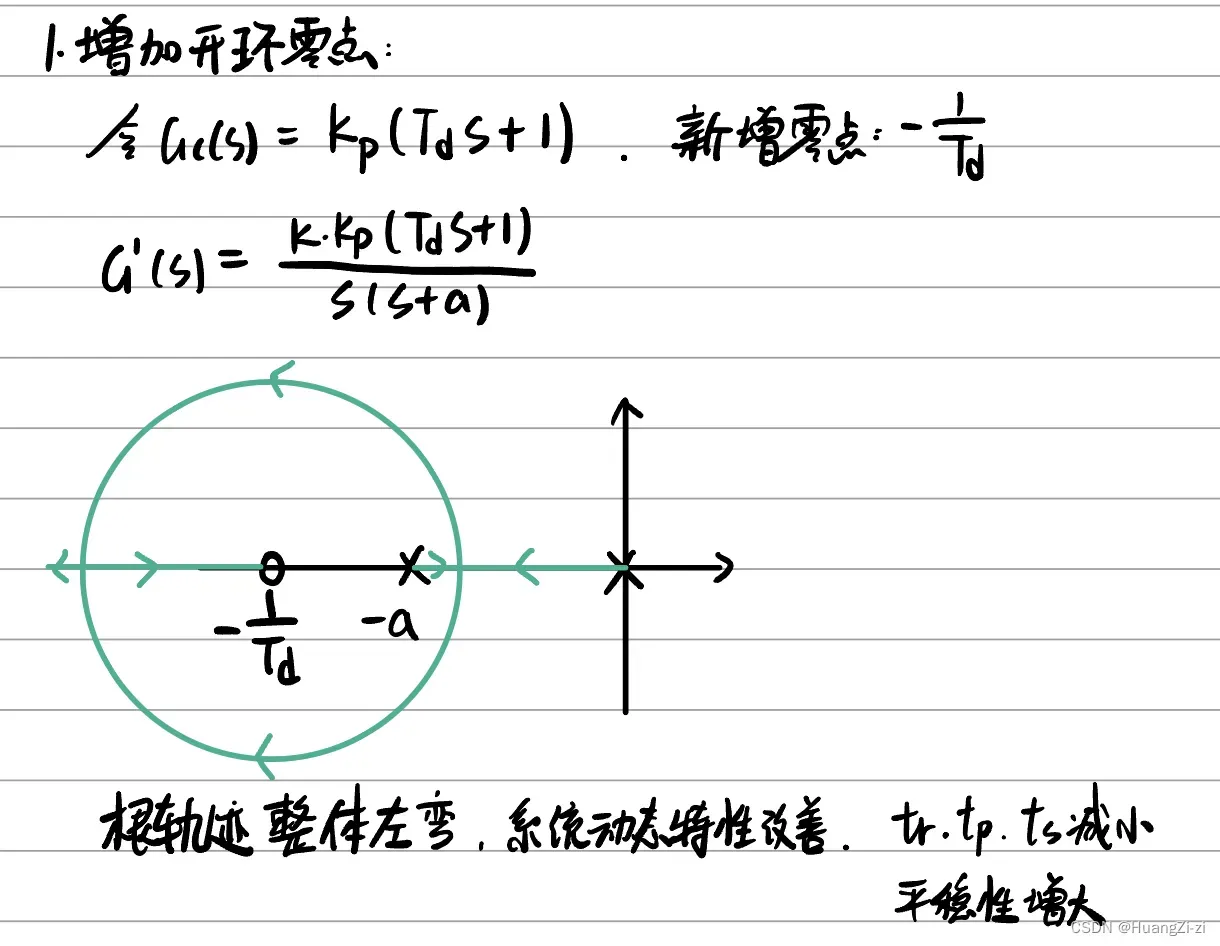
增加开环零点:有利于系统稳定和动态品质
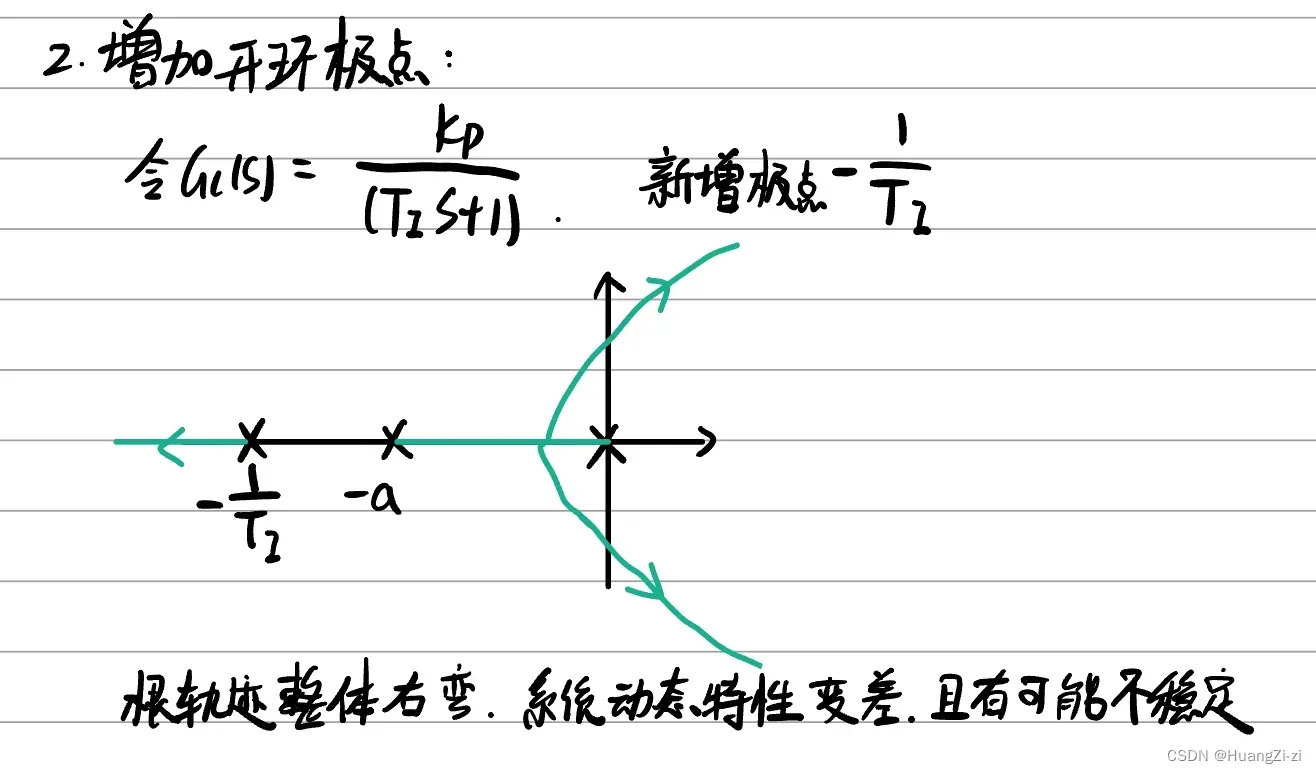
增加开环极点:不利于系统稳定和动态品质
通过这个例子感受一下:
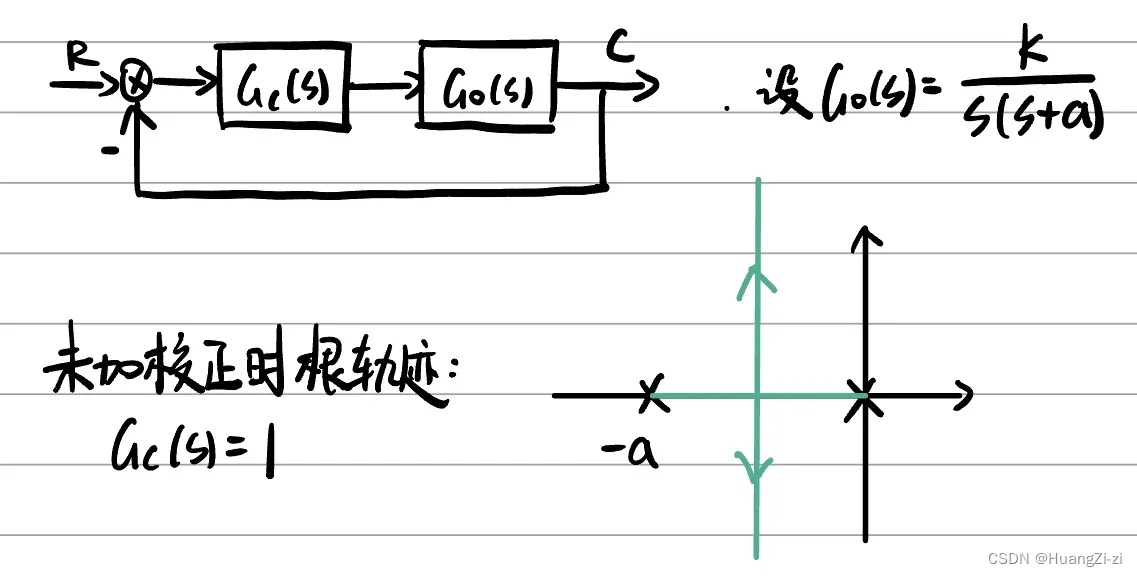
增加一个开环零点:
增加一个开环极点:
再来看一个稍复杂一些的例子:
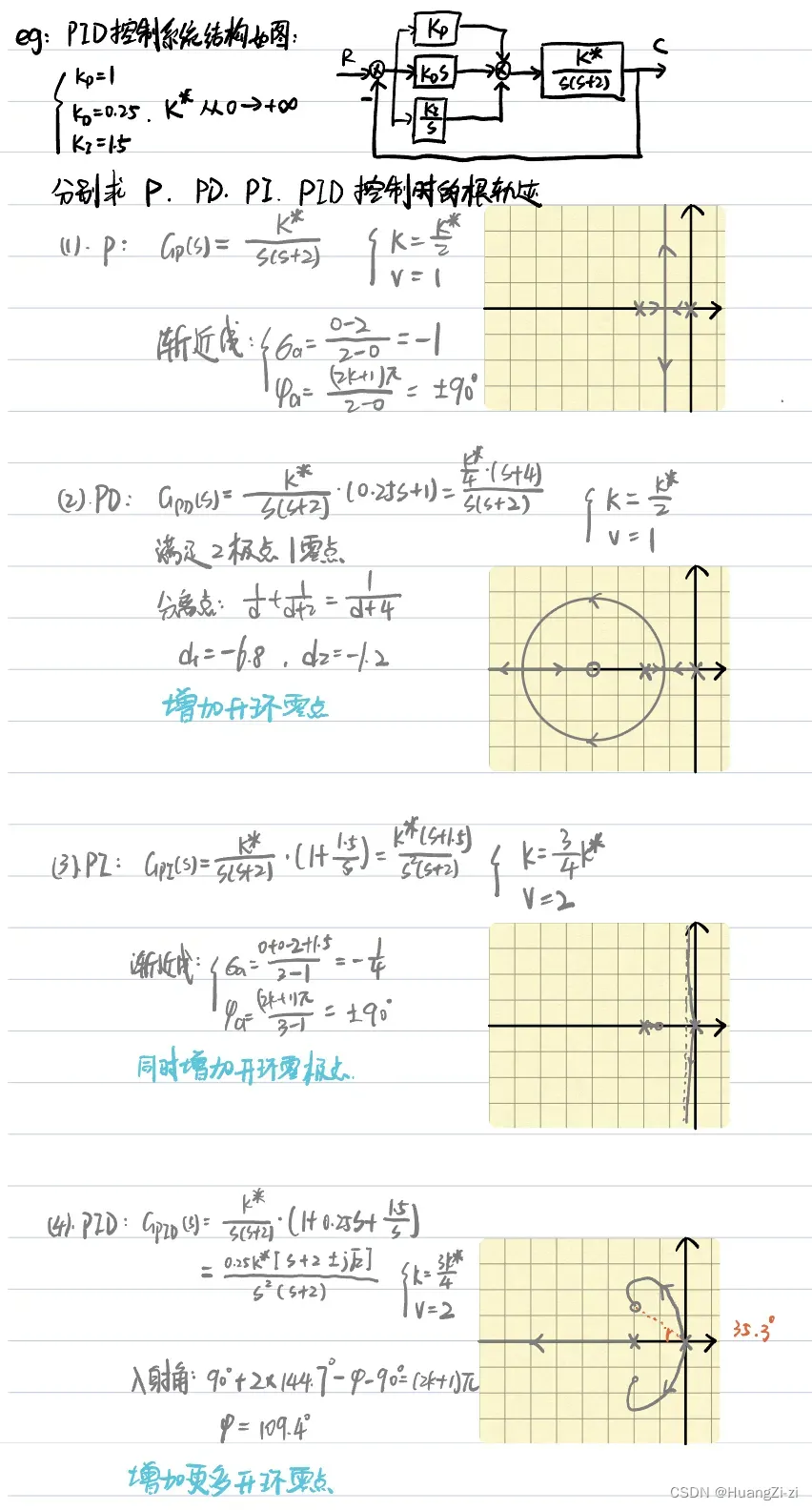
对比P和PD,增加开环零点之后根轨迹左移,动态性能提升。
对比P和PI,系统型别提高,跟踪输入的能力提高。
对比PD和PI,由于增加开环极点,动态性能变差。
对比PI和PID,再增加开环零点,同样根轨迹左移,动态性能提升。
根轨迹校正
利用根轨迹法校正系统,使原本不满足要求的系统现在满足要求。
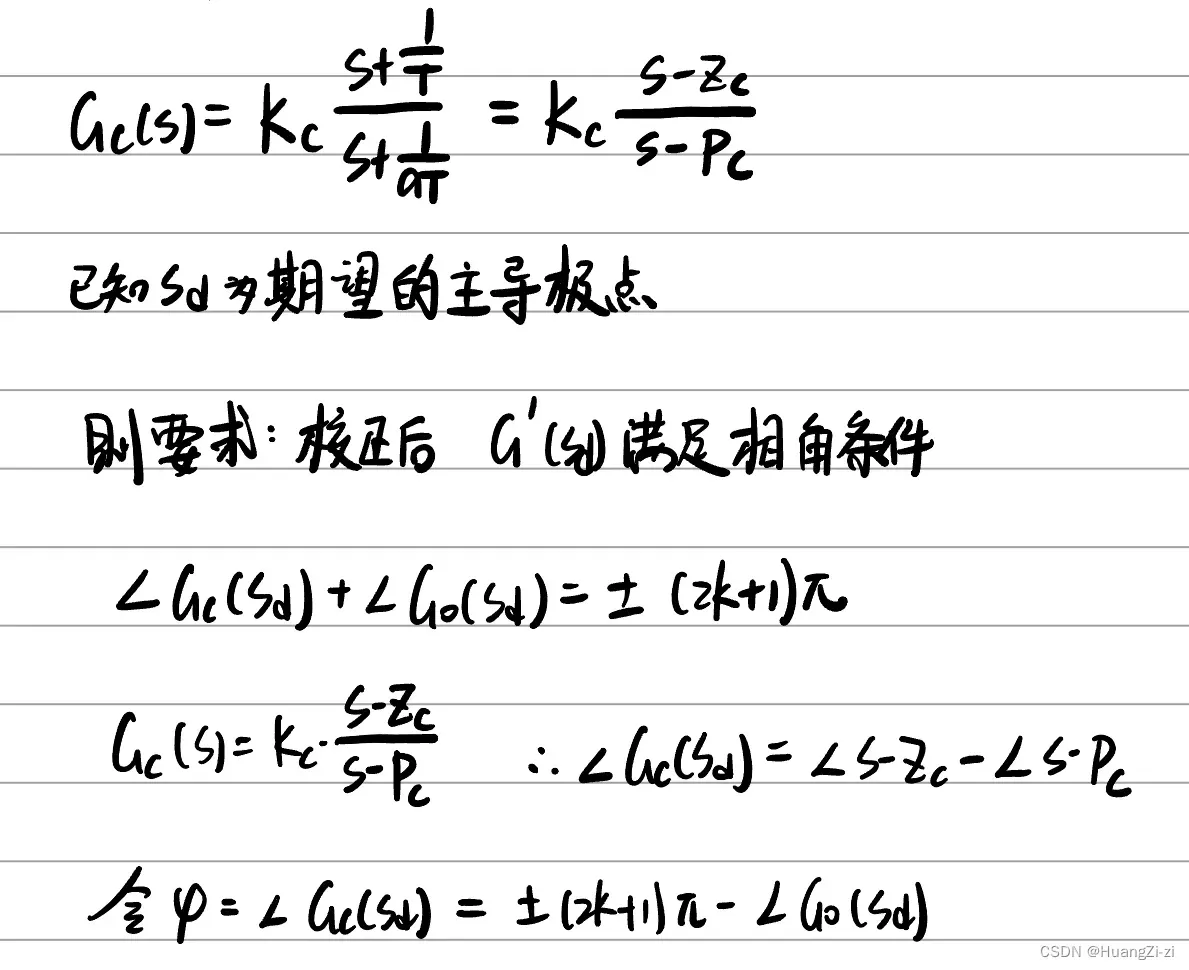
利用根轨迹法设计串连校正装置的基本思路:根据要求,设计主导极点,通过校正装置,使根轨迹通过主导极点,并保证设计的主导极点可以看成主导极点。
串连超前校正
「建议先学习频域校正,再来看这个内容,理解会更深」
原理与步骤
原理
如果期望的主导极点位于未校正系统根轨迹的左边,可以使用超前校正。超前校正装置零点离虚轴近,起主导作用,使系统根轨迹左移。极点离虚轴远,避免影响性能。
在图中定义和
,以及表示极点的时候定义的
,就可以用三角函数解出零点、极点的位置了。
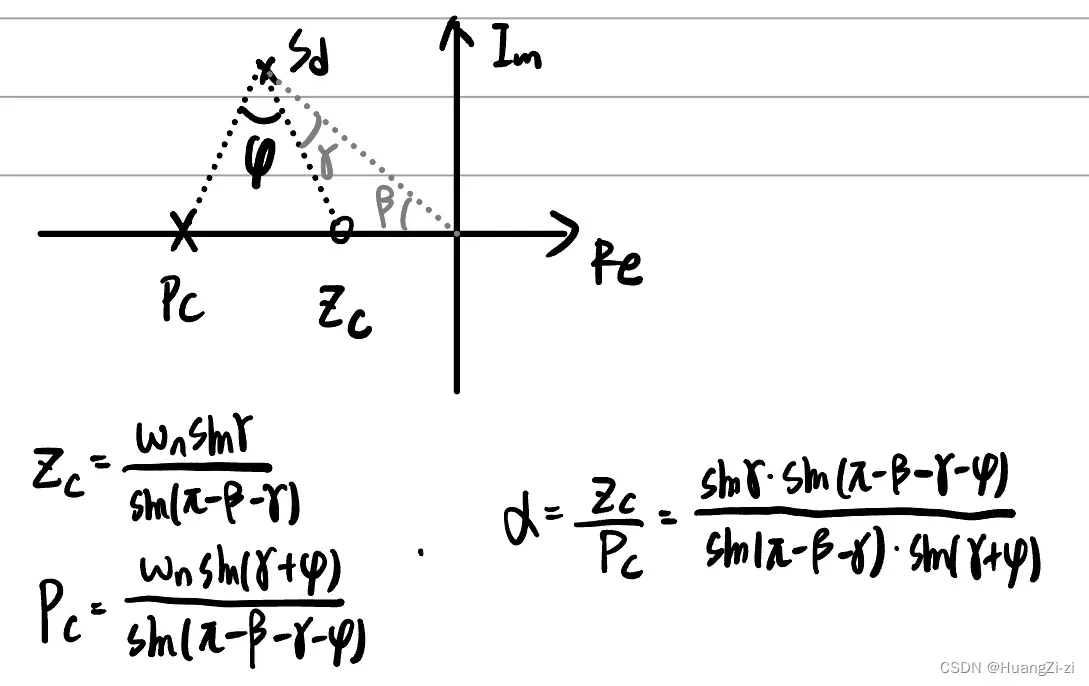
使用三角函数解比较严谨,实际使用的时候也可以按角度画图量长度。
超前校正的步骤
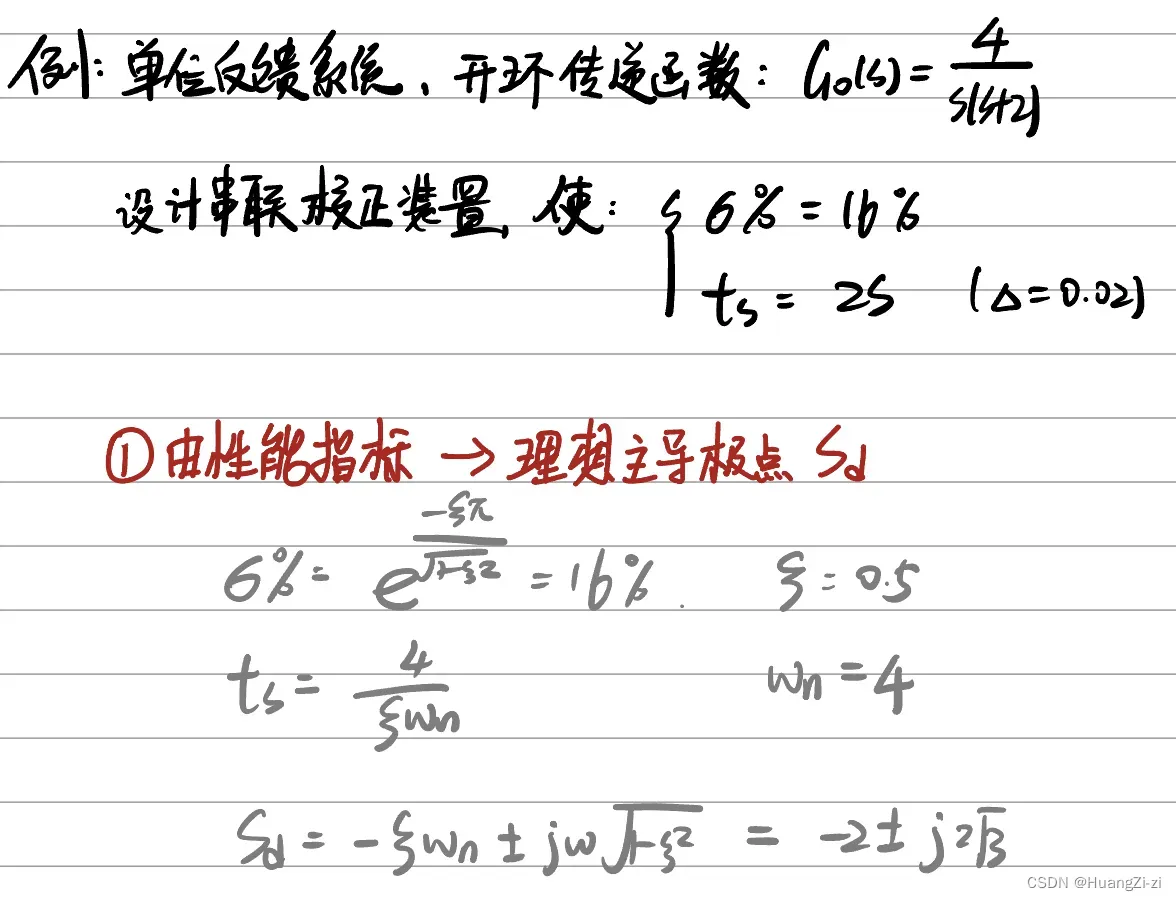
- 有给定性能指标,求理想主导极点
- 画未校正系统的根轨迹,确定校正方案
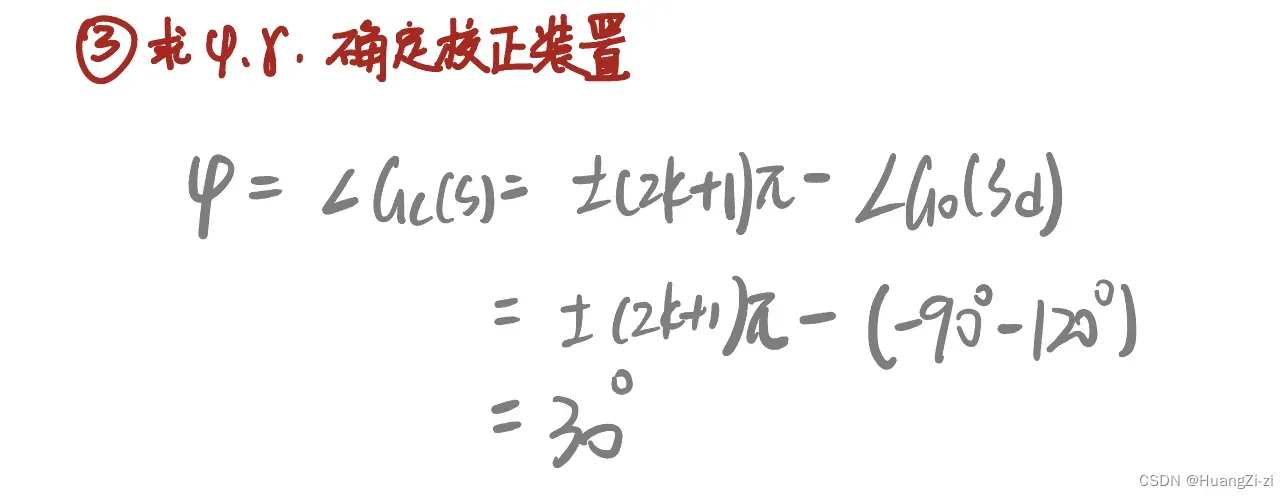
- 求
,确定零极点位置,确定校正装置
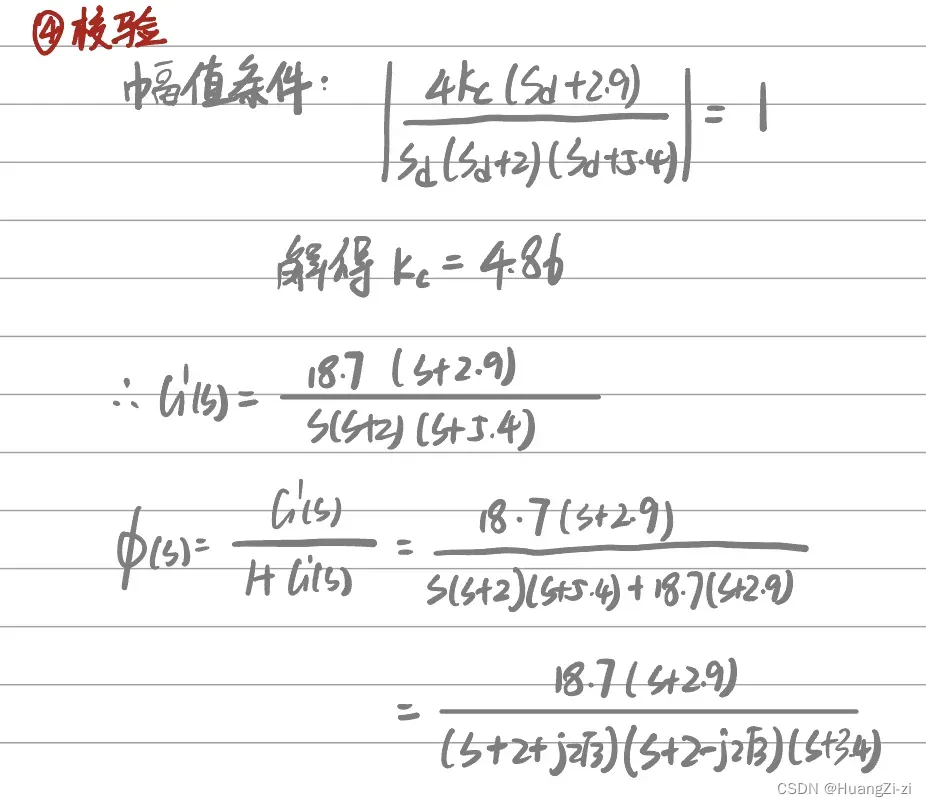
- 校验
超前校正例题
串连滞后校正
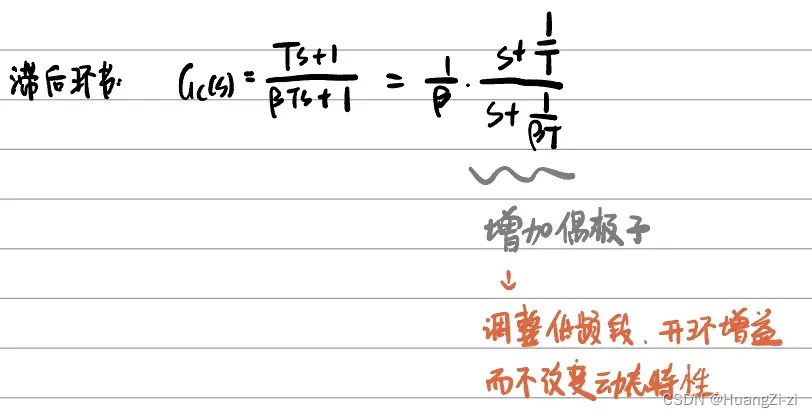
当系统已经有比较满意的暂态性能,需要提高稳态性能的时候,选用滞后校正。滞后校正实质为增加一对开环偶极子,在基本不改变根轨迹位置的情况下,增大开环增益,改善稳态特性。
附加开环偶极子的作用
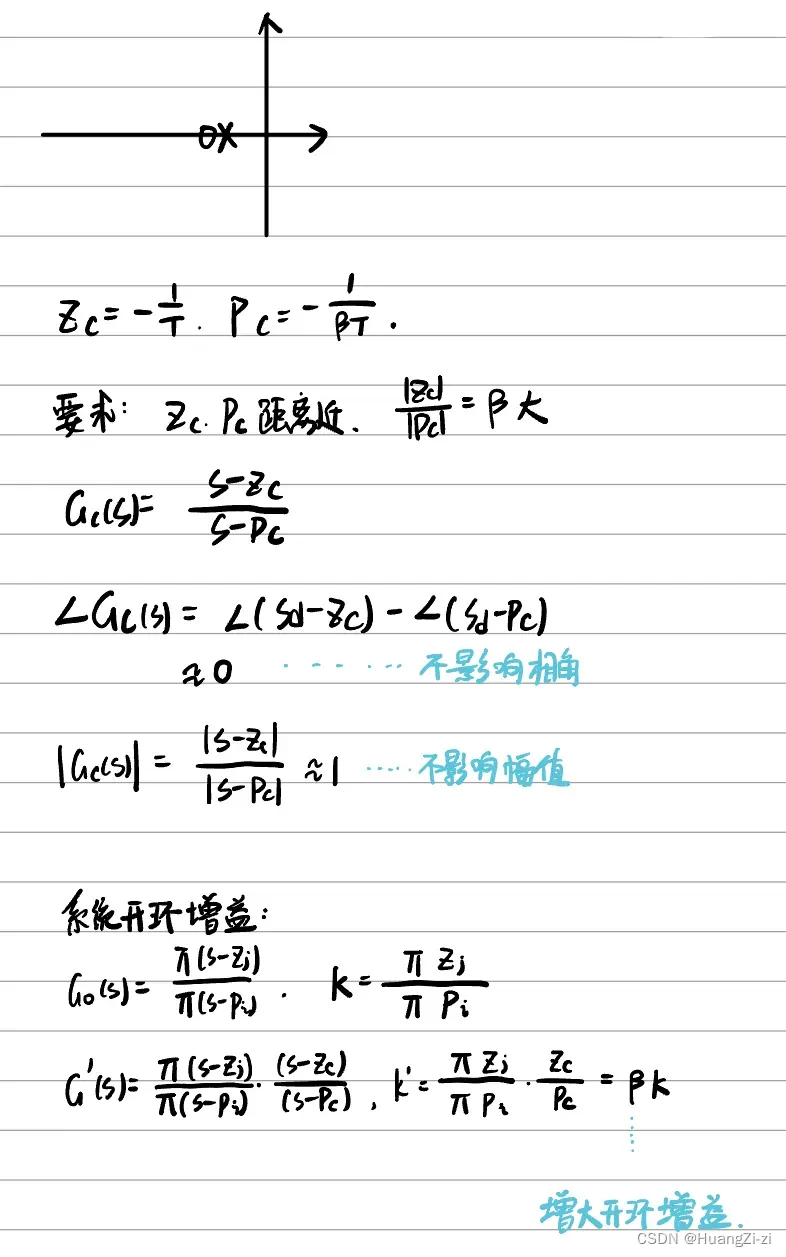
原理与步骤
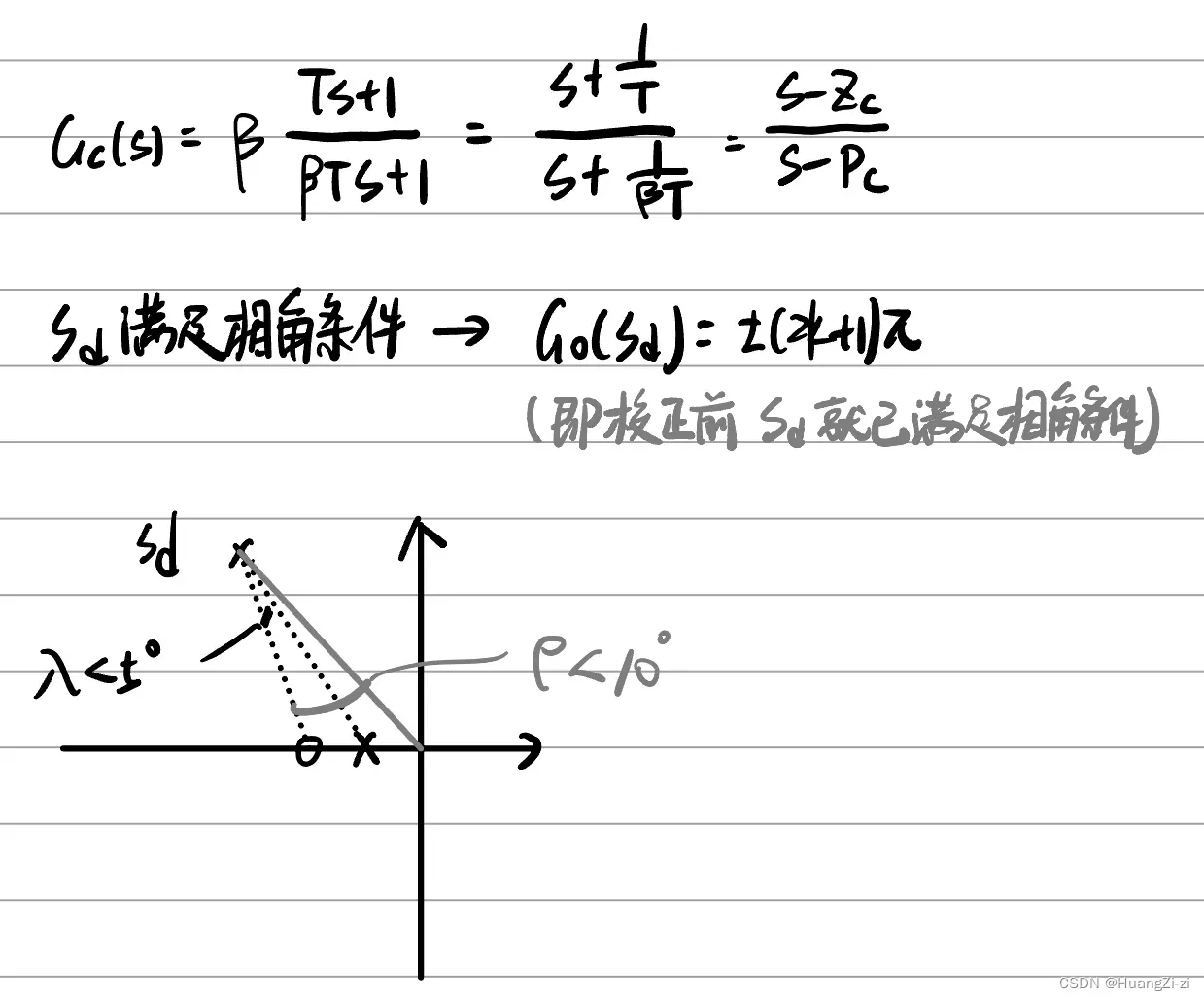
如图定义和
,在允许的取值范围里面取值,就可以用三角函数解出零极点位置,设计出校正装置了
步骤
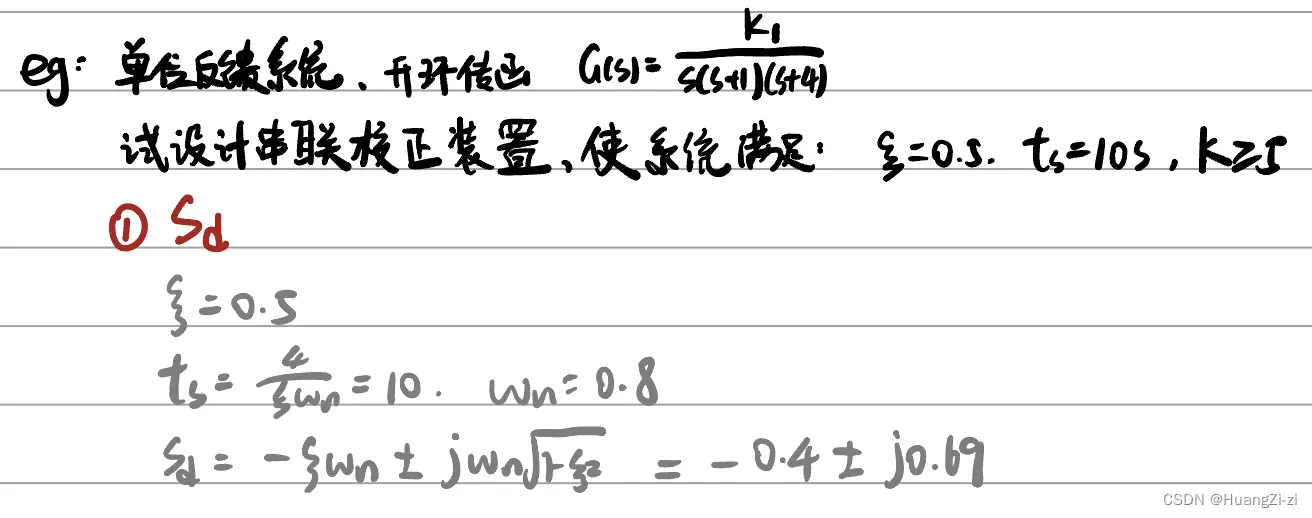
- 由期望性能指标求期望主导极点
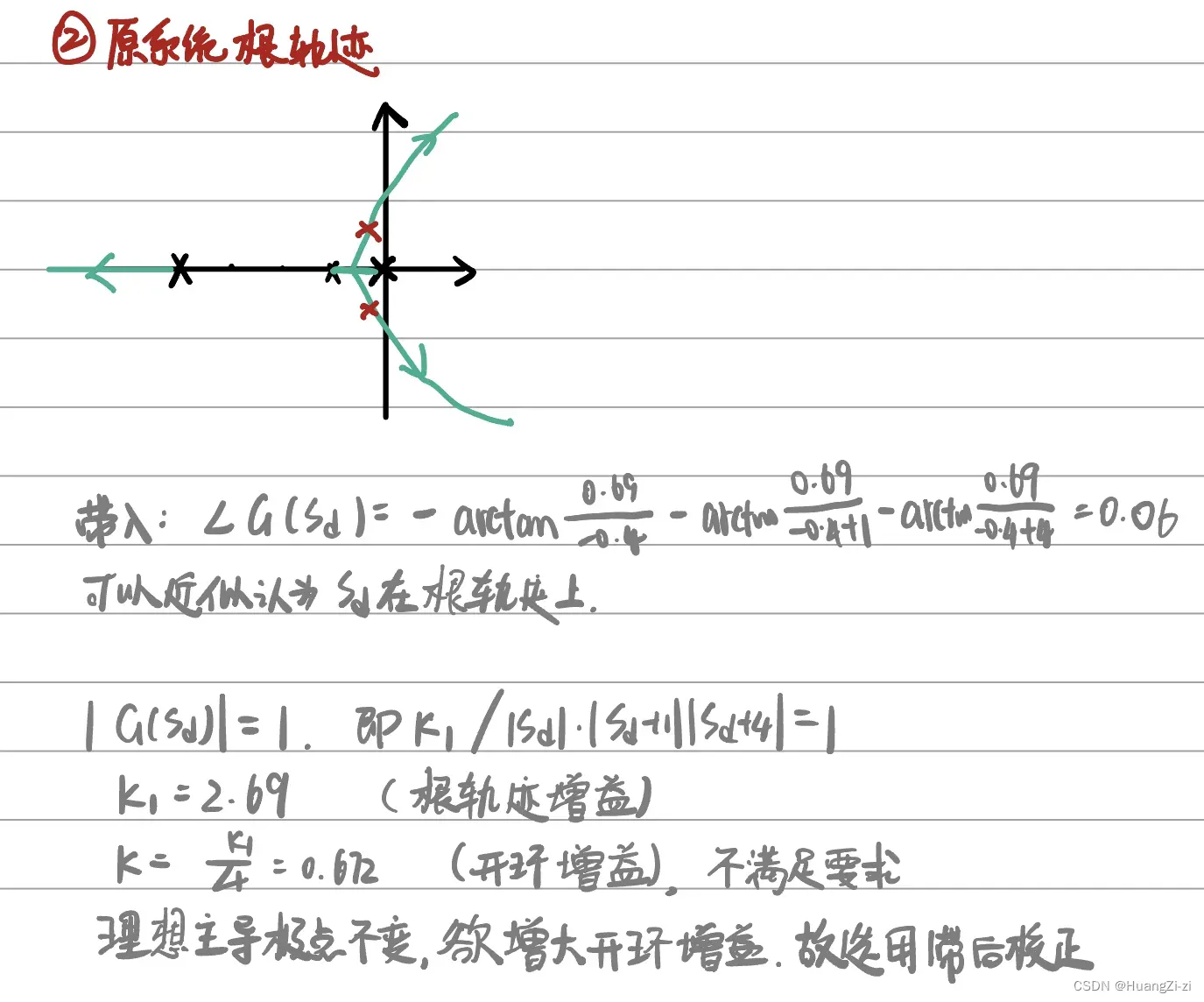
- 画原系统根轨迹,确定校正方案
- 求
,确定校正系统
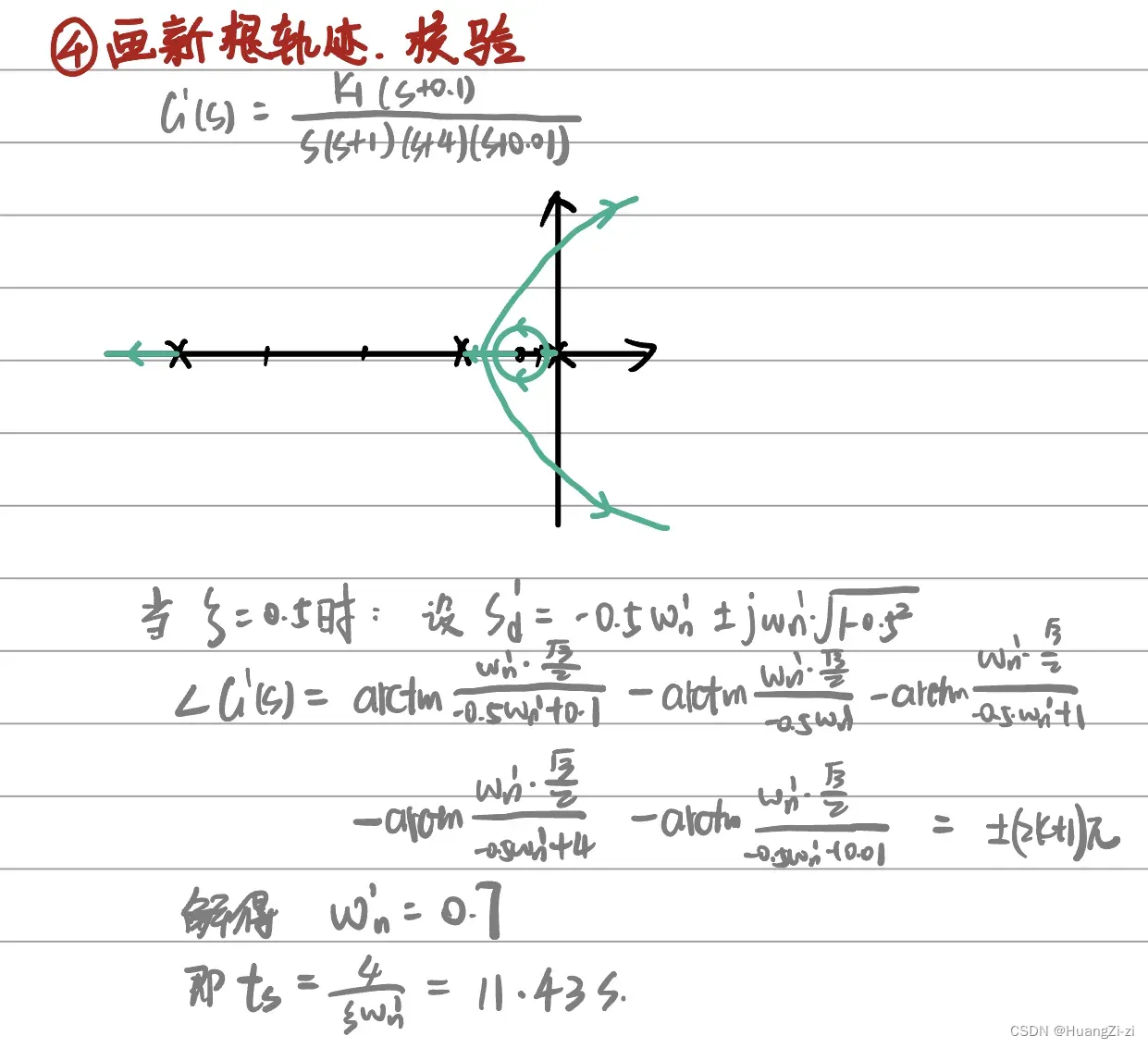
- 画新根轨迹,校验
滞后校正例题
开环增益提高倍,根据三角关系设计出零点和极点,可以写出校正环节的传递函数

文章出处登录后可见!