导航实现:SLAM建图
先安装相关的ROS功能包:
-
安装 gmapping 包(用于构建地图):sudo apt install ros-<ROS版本>-gmapping
-
安装地图服务包(用于保存与读取地图):sudo apt install ros-<ROS版本>-map-server
-
安装 navigation 包(用于定位以及路径规划):sudo apt install ros-<ROS版本>-navigation
新建功能包,并导入依赖: gmapping map_server amcl move_base,其中gampping用于构建地图,map_server用于保存与读取地图,amcl用于定位,move_base用于路径规划
(1)编写gmapping相关的launch文件
复制并修改如下:
<launch>
<param name="use_sim_time" value="true"/>是否使用仿真时间(仿真时要设置为True)
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<remap from="scan" to="scan"/>设置雷达话题,前面仿真雷达设置的话题就是scan
<param name="base_frame" value="base_footprint"/><!--底盘坐标系-->
<param name="odom_frame" value="odom"/> <!--里程计坐标系-->
<param name="map_update_interval" value="5.0"/>地图更新频率间隔
<param name="maxUrange" value="16.0"/>雷达测试范围最大16m
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="1.0"/>
<param name="angularUpdate" value="0.5"/>
<param name="temporalUpdate" value="3.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node>
<node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" />
<node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" />
<node pkg="rviz" type="rviz" name="rviz" />
<!-- 可以保存 rviz 配置并后期直接使用-->
<!--
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find my_nav_sum)/rviz/gmapping.rviz"/>
-->
</launch>
(2)启动Gazebo仿真环境和编写好的slam.launch文件
(3)在RVIZ中添加组件
-
添加机器人模型RobotModel
-
添加Laserscan并设置Topic话题scan
-
添加坐标系组件TF,Fram下即可找到map,odom
-
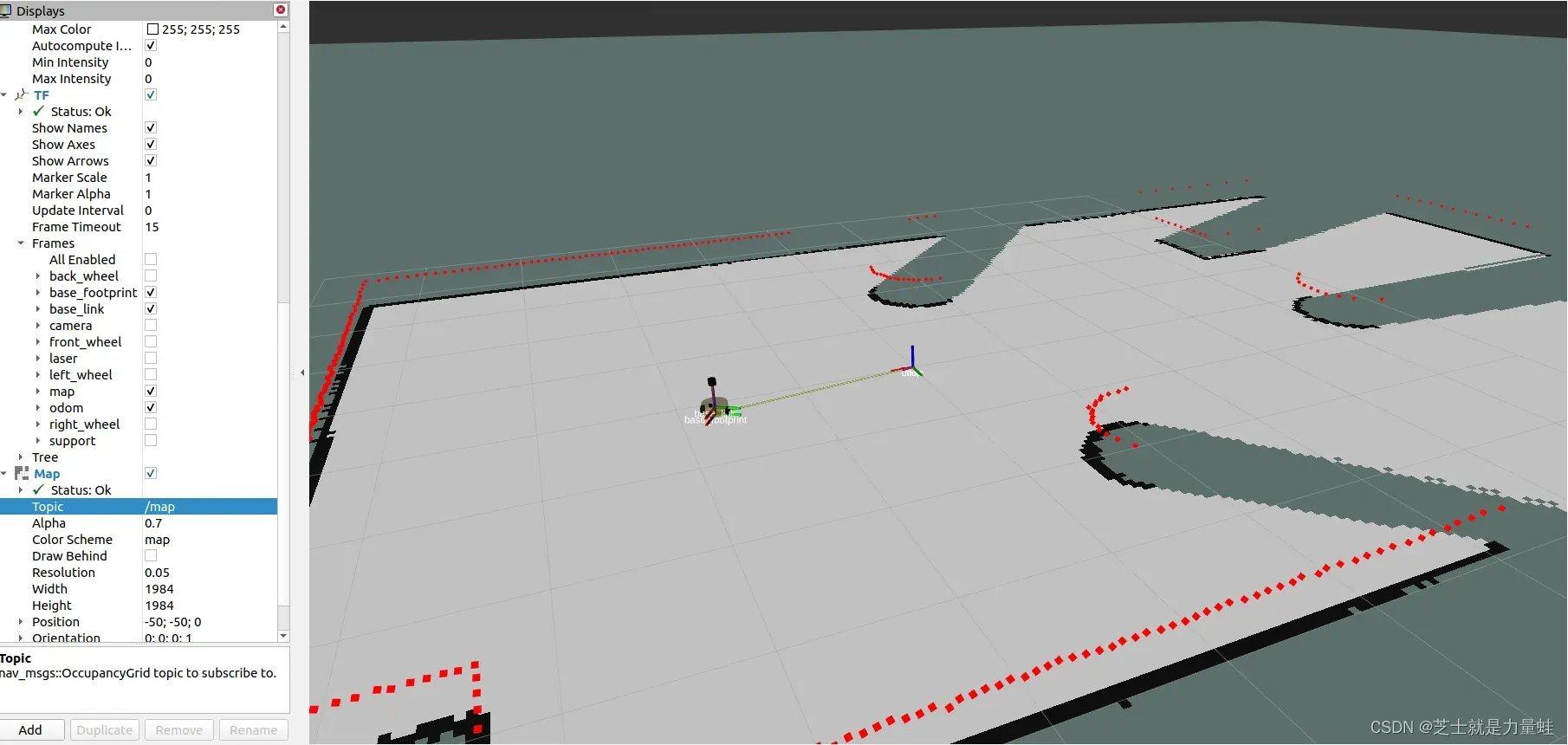
添加map组件用于建图,设置topic,发布话题栅格地图数据,这里设置为map
即可看到如下效果:
(4)在rviz中配置好之后,可以将目前配置保存:左上角save config as,保存到该功能包的config文件夹下,并在rivz启动中添加参数,以后启动就可以自动配置。
<node pkg="rviz" type="rviz" name="rviz" args="-d $find(功能包名) 功能包内的相对路径"/>
(5)启动键盘控制节点
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
控制小车运动,绕着地图走一圈建图。
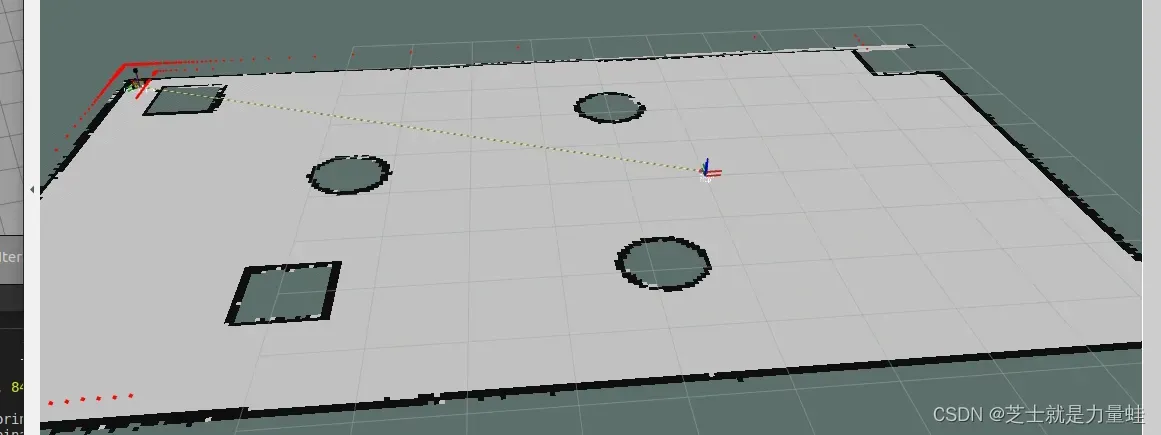
SLAM建图
建图结果如图所示,白色部分是无障碍物可以走的地方,黑色圈出部位为障碍物信息。
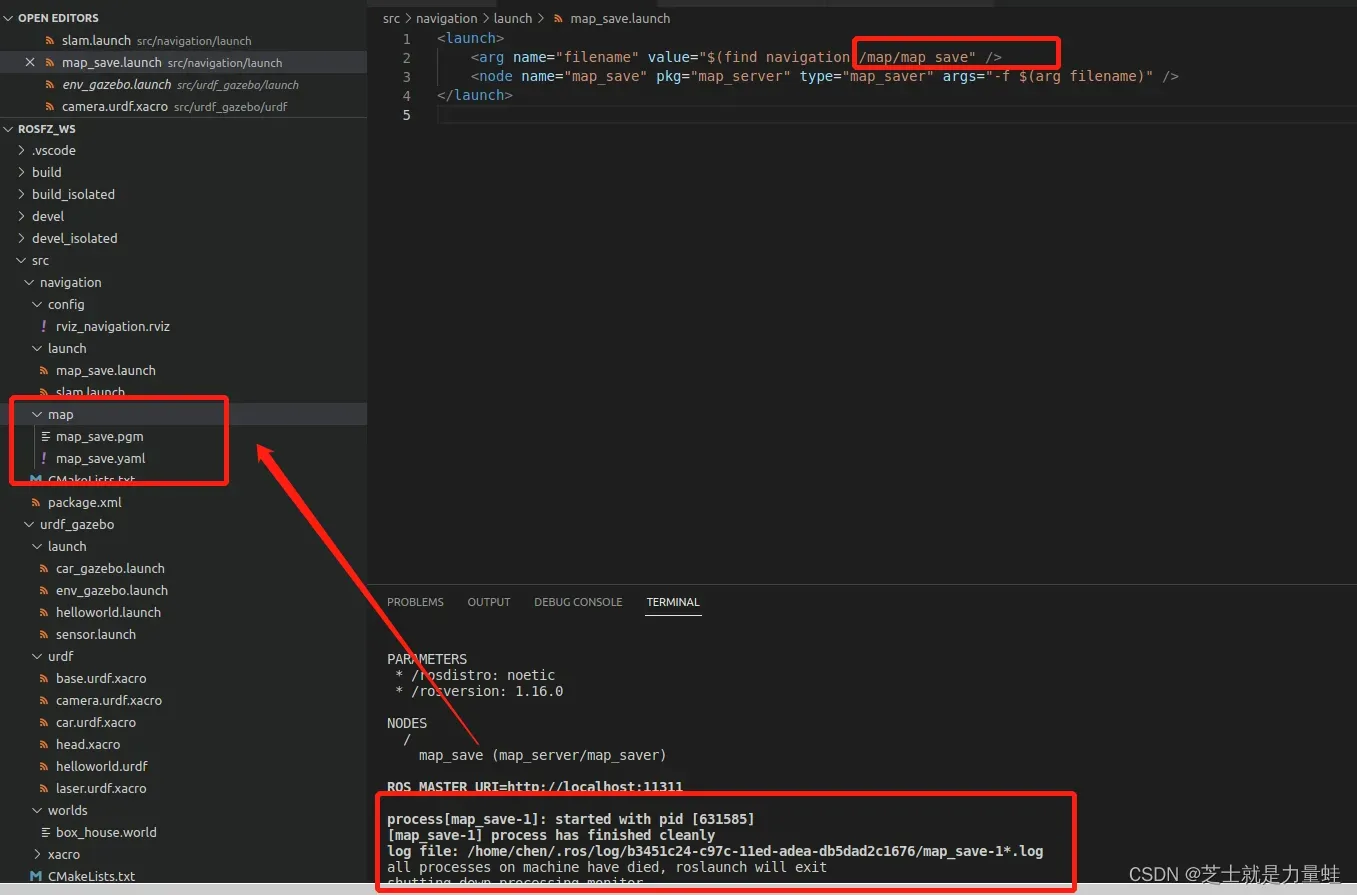
(6)保存地图map_server
如果直接关闭rviz退出,那么建好的地图将会消失,所以要编写launch文件进行保存操作
<launch>
<arg name="filename" value="$(find mycar_nav)/map/nav" />
<node name="map_save" pkg="map_server" type="map_saver" args="-f $(arg filename)" />
</launch>
可以看到在指定路径下产生了两个文件map_save.pgm和map_save.yaml
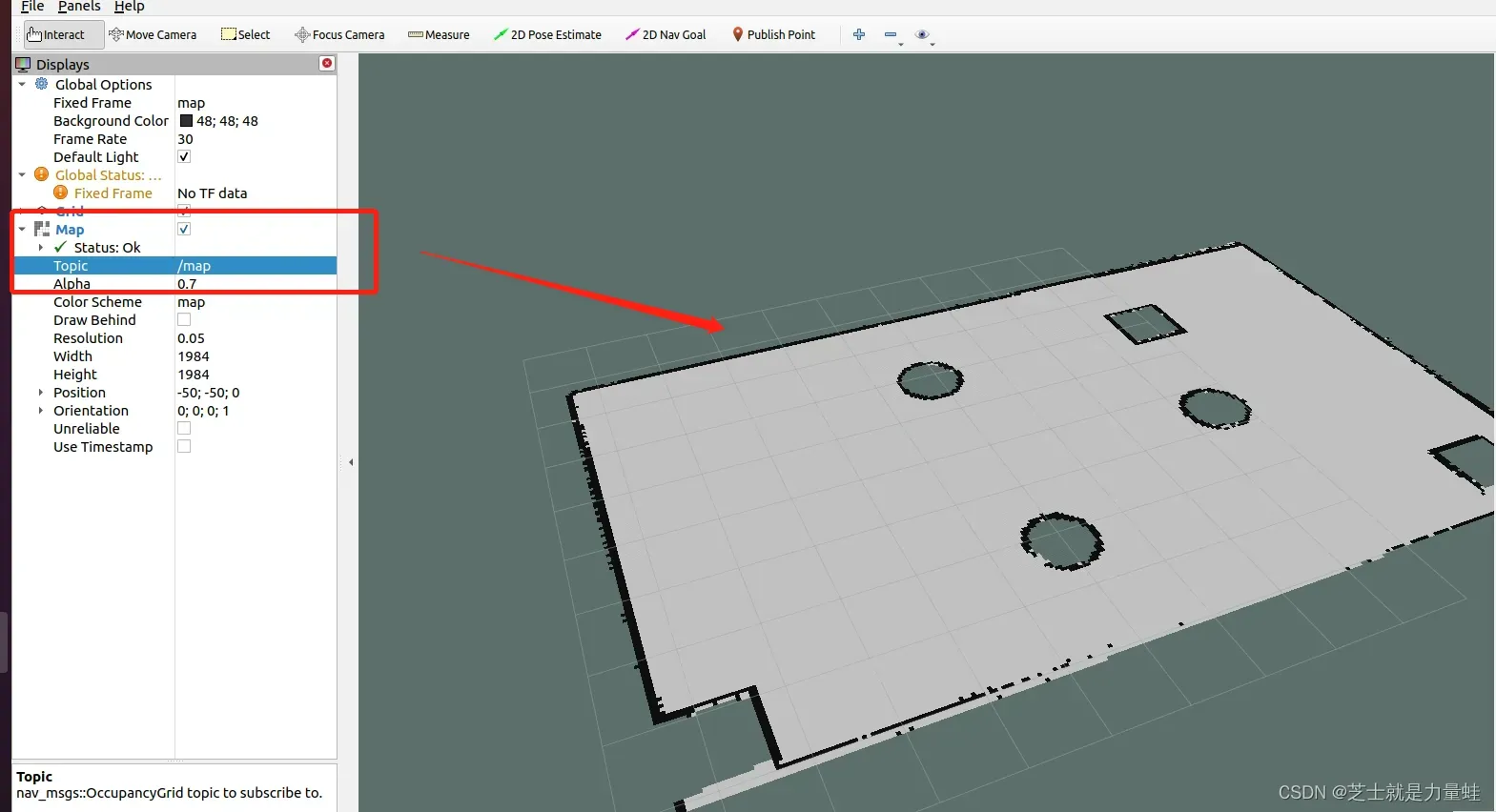
(7)读取地图信息(map_server包里的map_server)
新建launch文件,使用map_server调用上一步保存的map_save.yaml文件
代码示例如下:
<launch>
<node pkg="map_server" type="map_server" name="map_server" args="$(find 功能包名)/功能包内到yaml文件的路径"/>
</launch>
这样,之前我们发布的信息就会以话题的形式发布了,要看到地图的可视化效果我们需要借助rviz,可以在终端打开rviz并加入map插件,选择topic为map,即可看到效果。
文章出处登录后可见!