以下记录均是在bevformer_tiny版本上进行的实验,且不考虑时序输入
参考了https://github.com/DerryHub/BEVFormer_tensorrt,但是这个是为了部署在tensorRT上的,自己定义了一些特殊的算子,并不是我需要的,所以自己尝试重新转onnx。
一、配置环境
直接在bevformer官方推荐的环境上进行转onnx操作:https://github.com/fundamentalvision/BEVFormer/blob/master/docs/install.md
二、准备工作
在路径:mmdetection3d/BEVFormer/projects/mmdet3d_plugin/bevformer/apis/test.py中添加一个函数:
def custom_multi_gpu_test_onnx(model, data_loader,tmpdir=None, gpu_collect=False):
"""Test model with multiple gpus.
This method tests model with multiple gpus and collects the results
under two different modes: gpu and cpu modes. By setting 'gpu_collect=True'
it encodes results to gpu tensors and use gpu communication for results
collection. On cpu mode it saves the results on different gpus to 'tmpdir'
and collects them by the rank 0 worker.
Args:
model (nn.Module): Model to be tested.
data_loader (nn.Dataloader): Pytorch data loader.
tmpdir (str): Path of directory to save the temporary results from
different gpus under cpu mode.
gpu_collect (bool): Option to use either gpu or cpu to collect results.
Returns:
list: The prediction results.
"""
model.eval()
bbox_results = []
mask_results = []
dataset = data_loader.dataset
rank, world_size = get_dist_info()
if rank == 0:
prog_bar = mmcv.ProgressBar(len(dataset))
time.sleep(2) # This line can prevent deadlock problem in some cases.
have_mask = False
repetitions = 100
for i, data in enumerate(data_loader):
with torch.no_grad():
inputs = {}
inputs['img'] = data['img'][0].data[0].float().unsqueeze(0) #torch.randn(6,3,736,1280)#.cuda()
#inputs['return_loss'] = False
inputs['img_metas'] = [1]
inputs['img_metas'][0] = [1]
inputs['img_metas'][0][0] = {}
inputs['img_metas'][0][0]['can_bus'] = torch.from_numpy(data['img_metas'][0].data[0][0]['can_bus']).float()#torch.randn(18)#.cuda()
inputs['img_metas'][0][0]['lidar2img'] = torch.from_numpy(np.array(data['img_metas'][0].data[0][0]['lidar2img'])).float().unsqueeze(0)#torch.randn(1,6,4,4)#.cuda()
inputs['img_metas'][0][0]['scene_token'] = 'fcbccedd61424f1b85dcbf8f897f9754'
inputs['img_metas'][0][0]['img_shape'] = torch.Tensor([[480,800]])
output_file = '/×××/BEVformer/mmdetection3d/BEVFormer/J5/bevformer_tiny.onnx'
torch.onnx.export(
model,
inputs,
output_file,
export_params=True,
keep_initializers_as_inputs=True,
do_constant_folding=False,
verbose=False,
opset_version=11,
)
print(f"ONNX file has been saved in {output_file}")
return {0:'1'} 然后使用mmdetection3d/BEVFormer/tools/test.py这个用来测试的脚本进行转onnx操作,把233行的custom_multi_gpu_test改成上面定义的函数custom_multi_gpu_test_onnx,我是在cpu上操作的,所以把上面分布式操作去掉了,如图所示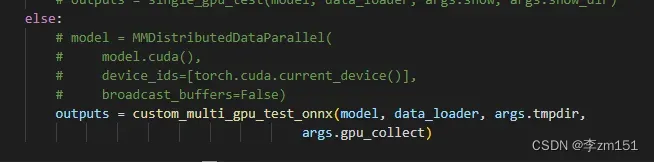
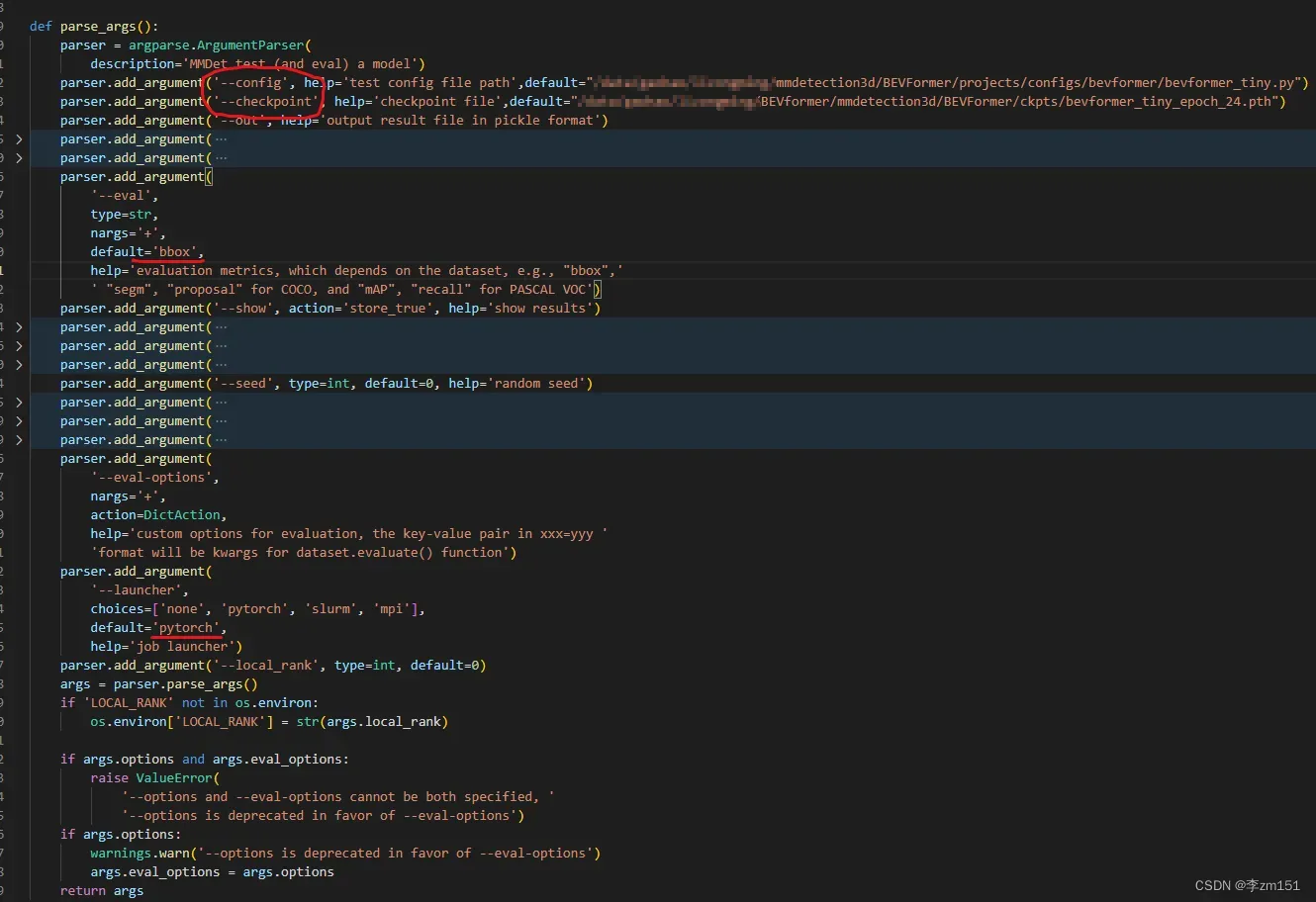
按照如下图修改配置信息,方便调试
三、开始排错
报错1:KeyError:‘RANK’
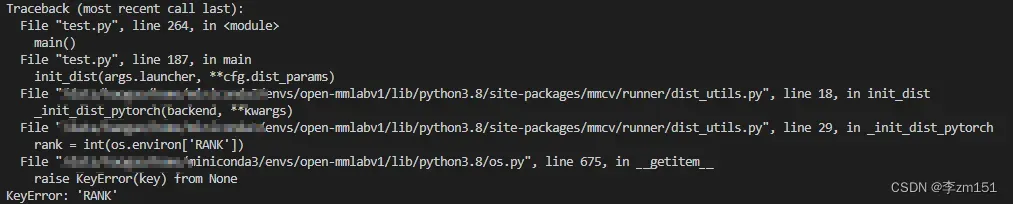
解决方法: 点进dist_utils.py里面,修改内容,如下所示
def _init_dist_pytorch(backend, **kwargs):
# TODO: use local_rank instead of rank % num_gpus
os.environ['RANK'] = '0'
os.environ['MASTER_ADDR'] = 'localhost'
os.environ['MASTER_PORT'] = '5678'
rank = int(os.environ['RANK'])
num_gpus = torch.cuda.device_count()
torch.cuda.set_device(rank % num_gpus)
dist.init_process_group(backend=backend, world_size=int(1),**kwargs)报错2:AttributeError: ‘NoneType’ object has no attribute ‘size’

原因是bevformer的模型的forward输入比较特殊,不是单纯的字典或者列表,为了方便转onnx,进行一些改写,如下:
(1)将mmdetection3d/BEVFormer/projects/mmdet3d_plugin/bevformer/detectors/bevformer.py中143行的forward函数改成:
def forward(self, input): #return_loss=True,
"""Calls either forward_train or forward_test depending on whether
return_loss=True.
Note this setting will change the expected inputs. When
`return_loss=True`, img and img_metas are single-nested (i.e.
torch.Tensor and list[dict]), and when `resturn_loss=False`, img and
img_metas should be double nested (i.e. list[torch.Tensor],
list[list[dict]]), with the outer list indicating test time
augmentations.
"""
#return_loss = input['return_loss']
#if return_loss:
#return self.forward_train(**kwargs)
#else:
#input['rescale']=True
# return_loss=False, rescale=True,
return self.forward_test(input['img_metas'], input['img'])(2)forward_test函数定义去掉**kwargs, self.simple_test()函数输入也去掉**kwargs
报错3:ValueError: only one element tensors can be converted to Python scalars

原因 bevformer本来是以numpy形式输入’can_bus’参数的,但是转模型的时候应该所有变量都是tensor的形式,我们在初始化数据输入的时候是用torch.randn()生成输入,所以做如下修改:
将bevformer/modules/transformer.py的get_bev_feature函数改为:
def get_bev_features(
self,
mlvl_feats,
bev_queries,
bev_h,
bev_w,
grid_length=[0.512, 0.512],
bev_pos=None,
prev_bev=None,
**kwargs):
"""
obtain bev features.
"""
bs = mlvl_feats[0].size(0)
bev_queries = bev_queries.unsqueeze(1).repeat(1, bs, 1)
bev_pos = bev_pos.flatten(2).permute(2, 0, 1)
# obtain rotation angle and shift with ego motion
delta_x = np.array([each['can_bus'][0].cpu().numpy()
for each in kwargs['img_metas']])
delta_x = torch.from_numpy(delta_x)
delta_y = np.array([each['can_bus'][1].cpu().numpy()
for each in kwargs['img_metas']])
delta_y = torch.from_numpy(delta_y)
ego_angle = np.array(
[each['can_bus'][-2] / np.pi * 180 for each in kwargs['img_metas']])
ego_angle = torch.from_numpy(ego_angle.astype(np.float32))
grid_length_y = grid_length[0]
grid_length_x = grid_length[1]
translation_length = torch.sqrt(delta_x ** 2 + delta_y ** 2)
translation_angle = (
(
torch.atan(delta_y / (delta_x + 1e-8))
+ ((1 - torch.sign(delta_x)) / 2) * torch.sign(delta_y) * np.pi
)
/ np.pi
* 180
)
bev_angle = ego_angle - translation_angle
shift_y = translation_length * \
torch.cos(bev_angle / 180 * np.pi) / grid_length_y / bev_h
shift_x = translation_length * \
torch.sin(bev_angle / 180 * np.pi) / grid_length_x / bev_w
shift_y = shift_y * int(self.use_shift)
shift_x = shift_x * int(self.use_shift)
shift = torch.stack([shift_x, shift_y]).permute(1, 0)
#shift = 0
if prev_bev is not None:
if prev_bev.shape[1] == bev_h * bev_w:
prev_bev = prev_bev.permute(1, 0, 2)
if self.rotate_prev_bev:
for i in range(bs):
# num_prev_bev = prev_bev.size(1)
rotation_angle = kwargs['img_metas'][i]['can_bus'][-1]
tmp_prev_bev = prev_bev[:, i].reshape(
bev_h, bev_w, -1).permute(2, 0, 1)
tmp_prev_bev = rotate(tmp_prev_bev, rotation_angle,
center=self.rotate_center)
tmp_prev_bev = tmp_prev_bev.permute(1, 2, 0).reshape(
bev_h * bev_w, 1, -1)
prev_bev[:, i] = tmp_prev_bev[:, 0]
# add can bus signals
can_bus = bev_queries.new_tensor(
[each['can_bus'].cpu().numpy() for each in kwargs['img_metas']]) # [:, :]
can_bus = self.can_bus_mlp(can_bus)[None, :, :]
bev_queries = bev_queries + can_bus * int(self.use_can_bus)
feat_flatten = []
spatial_shapes = []
for lvl, feat in enumerate(mlvl_feats):
bs, num_cam, c, h, w = feat.shape
spatial_shape = (h, w)
feat = feat.flatten(3).permute(1, 0, 3, 2)
if self.use_cams_embeds:
feat = feat + self.cams_embeds[:, None, None, :].to(feat.dtype)
feat = feat + self.level_embeds[None,
None, lvl:lvl + 1, :].to(feat.dtype)
spatial_shapes.append(spatial_shape)
feat_flatten.append(feat)
feat_flatten = torch.cat(feat_flatten, 2)
spatial_shapes = torch.as_tensor(
spatial_shapes, dtype=torch.long, device=bev_pos.device)
level_start_index = torch.cat((spatial_shapes.new_zeros(
(1,)), spatial_shapes.prod(1).cumsum(0)[:-1]))
feat_flatten = feat_flatten.permute(
0, 2, 1, 3) # (num_cam, H*W, bs, embed_dims)
bev_embed = self.encoder(
bev_queries,
feat_flatten,
feat_flatten,
bev_h=bev_h,
bev_w=bev_w,
bev_pos=bev_pos,
spatial_shapes=spatial_shapes,
level_start_index=level_start_index,
prev_bev=prev_bev,
shift=shift,
**kwargs
)
return bev_embed报错4:ValueError: only one element tensors can be converted to Python scalars

在encoder.py的point_sampling函数里面也有这个问题, 直接注释掉95~99行,改为
lidar2img = img_metas[0]['lidar2img']报错5:KeyError: ‘box_type_3d’

这里是bevformer模型输入比较特殊的地方,这个变量是一个类名,不是数据,大概的作用是对模型输出进行包装后处理的,我们在这里可以直接注释掉这一行
报错6:RuntimeError: Exporting the operator linspace to ONNX opset version 11 is not supported.

如果必须要用opset 11版本的torch.onnx转模型,这个地方会提示torch.linspace算子不支持,定位到算子在bevformer/modules/encoder.py的 BEVFormerEncoder.get_reference_points函数中
可以选择使用torch.range()和torch.arrange()算子进行替换,这里我用torch.arange(),替换如下:
def get_reference_points(H, W, Z=8, num_points_in_pillar=4, dim='3d', bs=1, device='cuda', dtype=torch.float):
"""Get the reference points used in SCA and TSA.
Args:
H, W: spatial shape of bev.
Z: hight of pillar.
D: sample D points uniformly from each pillar.
device (obj:`device`): The device where
reference_points should be.
Returns:
Tensor: reference points used in decoder, has \
shape (bs, num_keys, num_levels, 2).
"""
# reference points in 3D space, used in spatial cross-attention (SCA)
if dim == '3d':
zs = torch.cat((torch.arange(0.5,Z-0.5,(Z-1)/(num_points_in_pillar-1)), torch.Tensor([Z-0.5])),dim=0).view(-1, 1, 1).expand(num_points_in_pillar, H, W) / Z
xs = torch.cat((torch.arange(0.5, W-0.5, (W-1)/(W-1)), torch.Tensor([W-0.5])),dim=0).view(1, 1, W).expand(num_points_in_pillar, H, W) / W
ys = torch.cat((torch.arange(0.5, H-0.5, (H-1)/(H-1)), torch.Tensor([H-0.5])),dim=0).view(1, H, 1).expand(num_points_in_pillar, H, W) / H
ref_3d = torch.stack((xs, ys, zs), -1)
ref_3d = ref_3d.permute(0, 3, 1, 2).flatten(2).permute(0, 2, 1)
ref_3d = ref_3d[None].repeat(bs, 1, 1, 1)
return ref_3d
# reference points on 2D bev plane, used in temporal self-attention (TSA).
elif dim == '2d':
ref_y, ref_x = torch.meshgrid(
torch.cat((torch.arange(0.5, H-0.5, (H-1)/(H-1)), torch.Tensor([H-0.5])),dim=0),
torch.cat((torch.arange(0.5, W-0.5, (W-1)/(W-1)), torch.Tensor([W-0.5])),dim=0)
)
ref_y = ref_y.reshape(-1)[None] / H
ref_x = ref_x.reshape(-1)[None] / W
ref_2d = torch.stack((ref_x, ref_y), -1)
ref_2d = ref_2d.repeat(bs, 1, 1).unsqueeze(2)
return ref_2d报错7:RuntimeError: Exporting the operator maximum to ONNX opset version 11 is not supported
提示maximum算子不支持,定位到算子位于evformer/modules/encoder.py的 BEVFormerEncoder.point_sampling函数中,直接将torch.maximum()改为torch.max()效果是一样的。
报错8:RuntimeError: Exporting the operator nan_to_num to ONNX opset version 11 is not supported.
就在报错7的位置的下面一点点,有一个bev_mask=torch.nan_to_num(bev_mask),这个地方在转onnx的时候可以直接去掉。
报错9:RuntimeError: Exporting the operator grid_sampler to ONNX opset version 11 is not supported

很经典的报错,定位算子,从这个函数点进去:
from mmcv.ops.multi_scale_deform_attn import multi_scale_deformable_attn_pytorch先导入需要的函数:
from mmcv.ops.point_sample import bilinear_grid_sample然后再multi_scale_deformable_attn_pytorch中将
sampling_value_l_ = F.grid_sample(
value_l_,
sampling_grid_l_,
mode='bilinear',
padding_mode='zeros',
align_corners=False)替换为:
sampling_value_l_ = bilinear_grid_sample(value_l_,sampling_grid_l_)效果是一样的
并且将这个函数中的最后一行的reshape改为view
报错10:RuntimeError: view size is not compatible with input tensor’s size and stride (at least one dimension spans across two contiguous subspaces).

直接点进报错信息中的/mmcv/ops/point_sample.py中,找到x = x.view(n,-1),改为:
x = x.contiguous().view(n, -1)
y = y.contiguous().view(n, -1)报错11:RuntimeError: Exporting the operator atan2 to ONNX opset version 11 is not supported.
atan2算子不支持,定位到算子位置在mmdetection3d/BEVFormer/projects/mmdet3d_plugin/core/bbox/util.py的31行,替换为:
rot = (
(
torch.atan((rot_sine / (rot_cosine + 1e-8)).sigmoid())
+ ((1 - torch.sign(rot_cosine)) / 2) * torch.sign(rot_sine) * np.pi
)
)报错12:TypeError: _all() takes 2 positional arguments but 4 were given
(Occurred when translating all).

这个报错属于是torch版本比较低的缘故,但是由于bevformer的环境指定了torch==1.9.1所以不好直接更新torch版本,参考https://blog.csdn.net/andrewchen1985/article/details/125197226
从
from torch.onnx import symbolic_opset9点进symbolic_opset9这个文件里面,定位到2440行,将def _any(g,input)和def _all(g, input)这;两个函数改为:
def _any(g, *args):
# aten::any(Tensor self)
if len(args) == 1:
input = args[0]
dim, keepdim = None, 0
# aten::any(Tensor self, int dim, bool keepdim)
else:
input, dim, keepdim = args
dim = [_parse_arg(dim, "i")]
keepdim = _parse_arg(keepdim, "i")
input = _cast_Long(g, input, False) # type: ignore[name-defined]
input_sum = sym_help._reducesum_helper(g, input,
axes_i=dim, keepdims_i=keepdim)
return gt(g, input_sum, g.op("Constant", value_t=torch.LongTensor([0])))
def _all(g, *args):
input = g.op("Not", args[0])
# aten::all(Tensor self)
if len(args) == 1:
return g.op("Not", _any(g, input))
# aten::all(Tensor self, int dim, bool keepdim)
else:
return g.op("Not", _any(g, input, args[1], args[2]))
————————————————
版权声明:本文为CSDN博主「andrewchen1985」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/andrewchen1985/article/details/125197226报错13:RuntimeError: Exporting the operator __iand_ to ONNX opset version 11 is not supported.
算子不支持,这个算子找了好久,定位到mmdetection3d/BEVFormer/projects/mmdet3d_plugin/core/bbox/coders/nms_free_coder.py的80行,意思是mask &= ……相与操作‘&’有问题,替换为:
mask = (mask.float()*((final_box_preds[..., :3] <= self.post_center_range[3:]).all(1)).float()).bool()OK,到这里onnx初步转好了:
四、优化onnx
虽然转好了onnx,但是可以看到输出很多警告信息,实际上这个onnx可能还是有点问题的,我们先用onnx simplifier包优化一下:
import onnx
import onnxsim
onnx_path = '/×××/mmdetection3d/BEVFormer/ckpts/bevformer_tiny.onnx'
model_onnx = onnx.load(onnx_path) # load onnx model
onnx.checker.check_model(model_onnx) # check onnx model
print(onnx.helper.printable_graph(model_onnx.graph)) # print
sim_onnx_path = '/×××/mmdetection3d/BEVFormer/ckpts/bevformer_tiny_sim.onnx'
print(f'simplifying with onnx-simplifier {onnxsim.__version__}...')
model_onnx, check = onnxsim.simplify(model_onnx, check_n=3,skip_shape_inference=True)
assert check, 'assert check failed'
onnx.save(model_onnx, sim_onnx_path)报错1:onnxruntime.capi.onnxruntime_pybind11_state.InvalidGraph: [ONNXRuntimeError] : 10 : INVALID_GRAPH : This is an invalid model. Type Error: Type ‘tensor(int64)’ of input parameter (8733) of operator (Clip) in node (Clip_7993) is invalid.
定位这个问题的过程比较繁琐,从mmcv.cnn.bricks.transformer.MultiheadAttention的self.attn中进入nn.MultiheadAttention,从nn.MultiheadAttention的forward中进入F.multi_head_attention_forward(),再从F.multi_head_attention_forward()中的_in_projection_packed()点进去
简单来说点进functional中
import torch.nn.functional搜索_in_projection_packed,在第4729行将;
w_q, w_k, w_v = w.chunk(3)改为:
w_q, w_k, w_v = w.split(int(w.shape[0]/3))在第4734行将
b_q, b_k, b_v = b.chunk(3)改为:
b_q, b_k, b_v = b.split(int(b.shape[0]/3))另外,在SpatialCrossAttention的forward中的有一行 count = torch.clamp(count, min=1.0)
改为
count[count<1]=1在decoder.py中的inverse_sigmoid函数由于存在torch.clamp函数,所以需要改写为
def inverse_sigmoid(x, eps=1e-5):
"""Inverse function of sigmoid.
Args:
x (Tensor): The tensor to do the
inverse.
eps (float): EPS avoid numerical
overflow. Defaults 1e-5.
Returns:
Tensor: The x has passed the inverse
function of sigmoid, has same
shape with input.
"""
#x = x.clamp(min=0, max=1)
x[x<0] = 0
x[x>1] = 1
#x1 = x#.clamp(min=eps)
x1 = x.clone()
x1[x1<eps] = eps
#x2 = (1 - x).clamp(min=eps)
x2 = (1-x).clone()
x2[x2<eps] = eps
#return x1# / x2
return torch.log(x1 / x2)另外,也要把这个函数放到bevformer_head中,用来替换从mmdet.models.utils.transformer中导入的inverse_sigmoid
报错2:onnxruntime.capi.onnxruntime_pybind11_state.InvalidArgument: [ONNXRuntimeError] : 2 : INVALID_ARGUMENT : Non-zero status code returned while running Expand node. Name:’Expand_1855′ Status Message: invalid expand shape
关于expand算子的问题,
虽然还没搞清楚原因是啥,但是我知道咋改。定位到mmdetection3d/BEVFormer/projects/mmdet3d_plugin/bevformer/modules/spatial_cross_attention.py的SpatialCrossAttention的forward的forward里面,将
queries_rebatch[j, i, :len(index_query_per_img)] = query[j, index_query_per_img]改为:
queries_rebatch[j, i, :len(index_query_per_img)] = query[j, np.array(index_query_per_img)]下面一行的
reference_points_rebatch[j, i, :len(index_query_per_img)] = reference_points_per_img[j, index_query_per_img]改为:
reference_points_rebatch[j, i, :len(index_query_per_img)] = reference_points_per_img[j, np.array(index_query_per_img)]再在下面的
slots[j, index_query_per_img] += queries[j, i, :len(index_query_per_img)]前面加一行
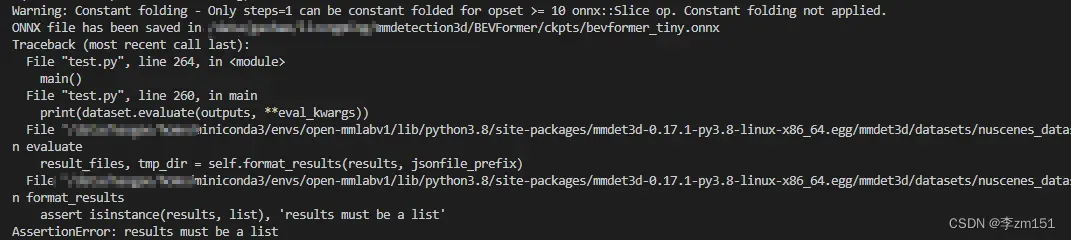
index_query_per_img = np.array(index_query_per_img)报错3:Tensor 18362 changes after optimization. The max diff is 2.288818359375e-05.
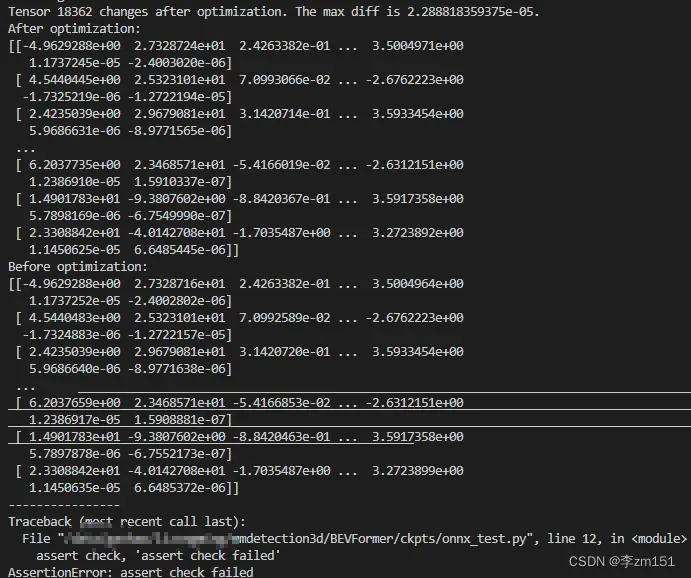
提示优化结果有偏差,初步定位了一下位置,发现在后处理部分,也就是bevformer.py的self.pts_bbox_head.get_bboxes,暂且把这个去掉,让def simple_test_pts(self, x, img_metas, prev_bev=None, rescale=False):只输出outs,如下所示
def simple_test_pts(self, x, img_metas, prev_bev=None, rescale=False):
"""Test function"""
outs = self.pts_bbox_head(x, img_metas, prev_bev=prev_bev)
return outs然后重新生成onnx,并且优化

至此,bevformer_tiny的onnx转换和优化工作初步完成!!!
排错不易,点赞加收藏哦!!!
文章出处登录后可见!