LoFTR: Detector-Free Local Feature Matching with Transformers
LoFTR:基于Transformer实现局部特征匹配
发表时间:[Submitted on 1 Apr 2021]
发表期刊/会议:Computer Vision and Pattern Recognition
论文地址:https://arxiv.org/abs/2104.00680
代码地址:https://zju3dv.github.io/loftr/
0 摘要
本文提出一种新的图像局部特征匹配方法(关键点匹配);
与传统方法(特征检测-描述符-匹配)不同,本文首先在粗粒度上进行像素级密集匹配然后再细粒度进行优化。
本文在Transformer中使用自注意层(self attention layer)和交叉注意层(cross attention layer)来获取两个图像的特征描述符;
在室内数据集和室外数据集上实验,表明,LoFTR很大程度上优于现在的方法。
1 简介
现有的匹配方法大多数包含三个阶段:特征检测-特征描述-特征匹配;
由于纹理稀疏、纹理重复、视点变化、光照变化等原因,特征检测器可能无法提取足够的特征点(第一阶段就效果不好,后面就不用说了);
最近一些工作通过建立像素级密集匹配来解决这个问题,由于CNN感受野小,效果并不好。
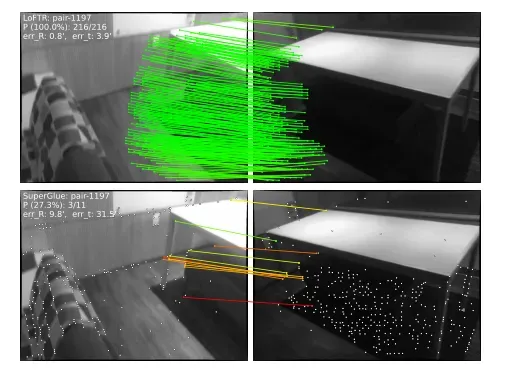
LoFTR能够在没有纹理的墙壁和地板上找到更多的关键点。基于特征检测的方法SuperGlue找不到可匹配的关键点。
基于以上结果,本文提出一种新的不用检测器的局部特征匹配方法LoFTR,此方法采用self attention和cross attention来处理从CNN中提取的密集局部特征。
- 利用CNN提取低分辨率特征;
- 特征经过LoFTR模块得到重构特征:
- Transformer encoder;
- Positional Encoding;
- Self attention;
- Cross attention;
- 用得到的特征进行粗粒度匹配;
- 对得到的粗粒度用阈值筛选,使用基于相关性的方法细化到像素级;
- 在细粒度(像素级)再次进行匹配;
2 相关工作
基于检测器的局部特征匹配方面的工作:典型如SIFT、ORB;
无检测器局部特征匹配方面的工作:如SIFT FLOW、NCNet;
Transformer方面的相关工作;
3 方法
3.1 局部特征提取
CNN具有局部性和平移等变性归纳偏置,适合提取局部特征。使用FPN(也是CNN的一种)来从图像对和
中提取多级特征:
和
分别代表用FPN提取的细粒度特征(原图的1/2,降低计算成本);
和
分别代表用FPN提取的粗粒度特征(原图的1/8,降低计算成本);
补充:CNN中的归纳偏置
归纳偏置其实就是一种先验知识,一种提前做好的假设。
在CNN中的归纳偏置一般包括两类:①locality(局部性)和②translation equivariance(平移等变性)
① locality:假设相同的区域会有相同的特征,靠得越近的东西相关性能也就越强。局部性可以控制模型的复杂度。
②translation equivariance:由于卷积核是一样的所以不管图片中的物体移动到哪里,只要是同样的输入进来遇到同样的卷积核,那么输出就是一样的。利用平移等变形可以很好的提高模型的泛化能力。
参考论文:https://arxiv.org/abs/2010.08515
3.2 LoFTR模块
提取到特征和
后,通过LoFTR模块来提取位置特征和上下文特征。经过LoFTR模块后的特征用
和
来表示。
步骤(如图2.2所示):
- 1.提取到的特征flatten为向量,加上位置编码;
- 2.self-attention;
- 3.cross-attention;
- 4.重复step2和step3
次;
- 5.得到
和
;
其实就是完全套到Transformer里;
self-attention:自己人问自己人(图A问图A),不要匹配重复了(见图3(b));
cross-attention:自己人问其他人(图A问图B),能不能匹配上(见图3(b));
Feature Visualization:将得到的特征经过PCA降维后,在RGB空间可视化。可以看出,两张图像同种颜色为图一区域,证明特征提取的好。
流程展示:
3.3 粗粒度匹配
- 计算特征向量之间的匹配概率
;
- 根据阈值
和相互最近邻算法(MNN)来过滤可能的异常值;
假设:
经过Transformer得到区域60 × 80个(非像素级的);
特征向量长度:60 × 80 = 4800;
- 特征之间的得分矩阵S计算如下(向量内积),S大小为4800;
- softmax表示对得分矩阵S进行归一化,得分矩阵进行内积,
;
- 置信度大于阈值
- 如下图所示:
- 输入图像大小为 H × W,降采样8倍,图像大小变为
;
- flatten成特征向量后长度为
,故
矩阵边长为
;
代码:
def forward(self, feat_c0, feat_c1, data, mask_c0=None, mask_c1=None):
N, L, S, C = feat_c0.size(0), feat_c0.size(1), feat_c1.size(1), feat_c0.size(2)
# normalize
# 两个特征
feat_c0, feat_c1 = map(lambda feat: feat / feat.shape[-1]**.5,
[feat_c0, feat_c1])
print("feat_c0 shape",feat_c0.shape)
print("feat_c1 shape", feat_c1.shape)
if self.match_type == 'dual_softmax':
# 计算矩阵S
# torch.einsum "nlc,nsc->nls" 矩阵乘法
sim_matrix = torch.einsum("nlc,nsc->nls", feat_c0,
feat_c1) / self.temperature
if mask_c0 is not None:
sim_matrix.masked_fill_(
~(mask_c0[..., None] * mask_c1[:, None]).bool(),
-INF)
# 计算矩阵P_c
conf_matrix = F.softmax(sim_matrix, 1) * F.softmax(sim_matrix, 2)
3.4 细粒度匹配
步骤:
- 根据粗粒度匹配结果在对应1 / 2图像的对应区域上裁取
大小的块(比如5 × 5的块,这里是像素级了);
- 将这两个
和
,分别是以点
和
为中心;
- 计算
- 计算概率分布的期望,得到B图上与
,表示为
;
代码
class FineMatching(nn.Module):
"""FineMatching with s2d paradigm"""
def __init__(self):
super().__init__()
def forward(self, feat_f0, feat_f1, data):
M, WW, C = feat_f0.shape
# 得到w
W = int(math.sqrt(WW))
scale = data['hw0_i'][0] / data['hw0_f'][0]
self.M, self.W, self.WW, self.C, self.scale = M, W, WW, C, scale
# M:粗粒度匹配到的数量
# corner case: if no coarse matches found
if M == 0:
assert self.training == False, "M is always >0, when training, see coarse_matching.py"
# logger.warning('No matches found in coarse-level.')
data.update({
'expec_f': torch.empty(0, 3, device=feat_f0.device),
'mkpts0_f': data['mkpts0_c'],
'mkpts1_f': data['mkpts1_c'],
})
return
# 中心点
feat_f0_picked = feat_f0_picked = feat_f0[:, WW//2, :]
sim_matrix = torch.einsum('mc,mrc->mr', feat_f0_picked, feat_f1)
softmax_temp = 1. / C**.5
# heatmap: w * w
heatmap = torch.softmax(softmax_temp * sim_matrix, dim=1).view(-1, W, W)
# compute coordinates from heatmap
# 求期望
coords_normalized = dsnt.spatial_expectation2d(heatmap[None], True)[0] # [M, 2]
# 热图
grid_normalized = create_meshgrid(W, W, True, heatmap.device).reshape(1, -1, 2) # [1, WW, 2]
# compute std over <x, y>
var = torch.sum(grid_normalized**2 * heatmap.view(-1, WW, 1), dim=1) - coords_normalized**2 # [M, 2]
std = torch.sum(torch.sqrt(torch.clamp(var, min=1e-10)), -1) # [M] clamp needed for numerical stability
# for fine-level supervision
data.update({'expec_f': torch.cat([coords_normalized, std.unsqueeze(1)], -1)})
# compute absolute kpt coords
self.get_fine_match(coords_normalized, data)
@torch.no_grad()
def get_fine_match(self, coords_normed, data):
W, WW, C, scale = self.W, self.WW, self.C, self.scale
# mkpts0_f and mkpts1_f
mkpts0_f = data['mkpts0_c']
scale1 = scale * data['scale1'][data['b_ids']] if 'scale0' in data else scale
mkpts1_f = data['mkpts1_c'] + (coords_normed * (W // 2) * scale1)[:len(data['mconf'])]
data.update({
"mkpts0_f": mkpts0_f,
"mkpts1_f": mkpts1_f
})
4 代码
4.1 LoFTR pipeline
class LoFTR(nn.Module):
def __init__(self, config):
super().__init__()
# Misc
self.config = config
# Modules
# FPN: resnet as backbone
self.backbone = build_backbone(config)
# 位置编码
self.pos_encoding = PositionEncodingSine(
config['coarse']['d_model'],
temp_bug_fix=config['coarse']['temp_bug_fix'])
# LoFTR module
self.loftr_coarse = LocalFeatureTransformer(config['coarse'])
# 粗粒度匹配
self.coarse_matching = CoarseMatching(config['match_coarse'])
# 细粒度匹配前的数据预处理
self.fine_preprocess = FinePreprocess(config)
# LoFTR module(与粗粒度的配置不同)
self.loftr_fine = LocalFeatureTransformer(config["fine"])
# 细粒度匹配
self.fine_matching = FineMatching()
def forward(self, data):
"""
Update:
data (dict): {
'image0': (torch.Tensor): (N, 1, H, W)
'image1': (torch.Tensor): (N, 1, H, W)
'mask0'(optional) : (torch.Tensor): (N, H, W) '0' indicates a padded position
'mask1'(optional) : (torch.Tensor): (N, H, W)
}
"""
# 1. Local Feature CNN
data.update({
'bs': data['image0'].size(0),
'hw0_i': data['image0'].shape[2:], 'hw1_i': data['image1'].shape[2:]
})
# input.shape: (640,480)
if data['hw0_i'] == data['hw1_i']: # faster & better BN convergence
# backbone cat 拼接两张图像 提取特征
feats_c, feats_f = self.backbone(torch.cat([data['image0'], data['image1']], dim=0))
# feats_c.shape: torch.Size([2,256,60,80]) 1 / 8
# feats_f.shape: torch.Size([2,128,240,320]) 1 / 2
# 两张特征图分开
(feat_c0, feat_c1), (feat_f0, feat_f1) = feats_c.split(data['bs']), feats_f.split(data['bs'])
else: # handle different input shapes
(feat_c0, feat_f0), (feat_c1, feat_f1) = self.backbone(data['image0']), self.backbone(data['image1'])
data.update({
'hw0_c': feat_c0.shape[2:], 'hw1_c': feat_c1.shape[2:],
'hw0_f': feat_f0.shape[2:], 'hw1_f': feat_f1.shape[2:]
})
# 2. coarse-level loftr module
# add featmap with positional encoding, then flatten it to sequence [N, HW, C]
# 位置编码
feat_c0 = rearrange(self.pos_encoding(feat_c0), 'n c h w -> n (h w) c')
feat_c1 = rearrange(self.pos_encoding(feat_c1), 'n c h w -> n (h w) c')
mask_c0 = mask_c1 = None # mask is useful in training
if 'mask0' in data:
mask_c0, mask_c1 = data['mask0'].flatten(-2), data['mask1'].flatten(-2)
# 经过LoFTR module编码
feat_c0, feat_c1 = self.loftr_coarse(feat_c0, feat_c1, mask_c0, mask_c1)
# 3. match coarse-level 粗粒度匹配
self.coarse_matching(feat_c0, feat_c1, data, mask_c0=mask_c0, mask_c1=mask_c1)
# 4. fine-level refinement 细粒度匹配数据处理
feat_f0_unfold, feat_f1_unfold = self.fine_preprocess(feat_f0, feat_f1, feat_c0, feat_c1, data)
if feat_f0_unfold.size(0) != 0: # at least one coarse level predicted
feat_f0_unfold, feat_f1_unfold = self.loftr_fine(feat_f0_unfold, feat_f1_unfold)
# 5. match fine-level 细粒度匹配
self.fine_matching(feat_f0_unfold, feat_f1_unfold, data)
def load_state_dict(self, state_dict, *args, **kwargs):
for k in list(state_dict.keys()):
if k.startswith('matcher.'):
state_dict[k.replace('matcher.', '', 1)] = state_dict.pop(k)
return super().load_state_dict(state_dict, *args, **kwargs)
4.2 局部特征提取FPN(对应3.1)
就是一些卷积什么的…
def build_backbone(config):
if config['backbone_type'] == 'ResNetFPN':
if config['resolution'] == (8, 2):
return ResNetFPN_8_2(config['resnetfpn'])
class ResNetFPN_8_2(nn.Module):
"""
ResNet+FPN, output resolution are 1/8 and 1/2.
Each block has 2 layers.
"""
def __init__(self, config):
super().__init__()
# Config
block = BasicBlock
initial_dim = config['initial_dim']
block_dims = config['block_dims']
# Class Variable
self.in_planes = initial_dim
# Networks
self.conv1 = nn.Conv2d(1, initial_dim, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(initial_dim)
self.relu = nn.ReLU(inplace=True)
self.layer1 = self._make_layer(block, block_dims[0], stride=1) # 1/2
self.layer2 = self._make_layer(block, block_dims[1], stride=2) # 1/4
self.layer3 = self._make_layer(block, block_dims[2], stride=2) # 1/8
# 3. FPN upsample
self.layer3_outconv = conv1x1(block_dims[2], block_dims[2])
self.layer2_outconv = conv1x1(block_dims[1], block_dims[2])
self.layer2_outconv2 = nn.Sequential(
conv3x3(block_dims[2], block_dims[2]),
nn.BatchNorm2d(block_dims[2]),
nn.LeakyReLU(),
conv3x3(block_dims[2], block_dims[1]),
)
self.layer1_outconv = conv1x1(block_dims[0], block_dims[1])
self.layer1_outconv2 = nn.Sequential(
conv3x3(block_dims[1], block_dims[1]),
nn.BatchNorm2d(block_dims[1]),
nn.LeakyReLU(),
conv3x3(block_dims[1], block_dims[0]),
)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
elif isinstance(m, (nn.BatchNorm2d, nn.GroupNorm)):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def _make_layer(self, block, dim, stride=1):
layer1 = block(self.in_planes, dim, stride=stride)
layer2 = block(dim, dim, stride=1)
layers = (layer1, layer2)
self.in_planes = dim
return nn.Sequential(*layers)
def forward(self, x):
# ResNet Backbone
x0 = self.relu(self.bn1(self.conv1(x)))
x1 = self.layer1(x0) # 1/2
x2 = self.layer2(x1) # 1/4
x3 = self.layer3(x2) # 1/8
# FPN
x3_out = self.layer3_outconv(x3)
# 上采样
x3_out_2x = F.interpolate(x3_out, scale_factor=2., mode='bilinear', align_corners=True)
x2_out = self.layer2_outconv(x2)
x2_out = self.layer2_outconv2(x2_out+x3_out_2x)
x2_out_2x = F.interpolate(x2_out, scale_factor=2., mode='bilinear', align_corners=True)
x1_out = self.layer1_outconv(x1)
x1_out = self.layer1_outconv2(x1_out+x2_out_2x)
return [x3_out, x1_out]
4.3 位置编码
# 正弦位置编码
class PositionEncodingSine(nn.Module):
def __init__(self, d_model, max_shape=(256, 256), temp_bug_fix=True):
super().__init__()
pe = torch.zeros((d_model, *max_shape))
# 256 * 256
# 1 1 1...
# 2 2 2...
# ...
# 256 256 256...
y_position = torch.ones(max_shape).cumsum(0).float().unsqueeze(0)
# # 256 * 256
# 1 2 3 ...256
# 1 2 3 ...256
# 1 2 3 ...256
x_position = torch.ones(max_shape).cumsum(1).float().unsqueeze(0)
# div_term: torch.Size([64])
if temp_bug_fix:
div_term = torch.exp(torch.arange(0, d_model//2, 2).float() * (-math.log(10000.0) / (d_model//2)))
else: # a buggy implementation (for backward compatability only)
div_term = torch.exp(torch.arange(0, d_model//2, 2).float() * (-math.log(10000.0) / d_model//2))
div_term = div_term[:, None, None] # [C//4, 1, 1]
# pe torch.Size([256, 256, 256])
pe[0::4, :, :] = torch.sin(x_position * div_term)
pe[1::4, :, :] = torch.cos(x_position * div_term)
pe[2::4, :, :] = torch.sin(y_position * div_term)
pe[3::4, :, :] = torch.cos(y_position * div_term)
self.register_buffer('pe', pe.unsqueeze(0), persistent=False) # [1, C, H, W]
def forward(self, x):
"""
Args:
x: [N, C, H, W]
"""
return x + self.pe[:, :, :x.size(2), :x.size(3)]
文章出处登录后可见!