推荐:用 NSDT设计器 快速搭建可编程3D场景。
3D 数据的持续学习正在成为机器学习和理解我们周围世界的越来越重要的部分。 随着新的 3D 数据提取硬件(如深度相机和 LiDAR)在闭路电视、相机和智能手机中变得司空见惯,越来越多的人正在使用它提供的额外维度。 此外,摄影测量和 Structure from Motion 正在成为 3D 重建和建模流程的正常组成部分,并且提取和处理大型 3D 数据集正在成为必需品。 3D 深度学习的非结构化数据可以有不同的表示:
- 点云 [3,4,11]
- 体素和体素网格 [1, 8, 9]
- 深度图 [2]
- 图 [5, 10]
这些远非所有可能的 3D 数据演示,还有其他的,如参数化 CAD 模型、多视图图像、体积等。要真正了解其中的一些内容,你可以阅读 Florent Paux 撰写的信息丰富的文章“如何表示 3D 数据?”。
在本文中,我们将专注于将 3D 数据表示为体素。 但首先什么是体素? 最简单的比较是体素是 3D 像素。 体素被排列成体素网格,这可以看作是图像有序结构的 3D 等价物。 当点云或网格变成体素表示时,它与体素网格相交。 点云或网格中的点然后落在某些体素中。 这些体素被留下,而所有其他不与任何点相交的体素要么被丢弃,要么被归零,我们剩下的是对象的雕刻表示。 体素化可以只是表面级别或整个网格/点云体积。
构建网格和点云的体素化表示是许多深度学习方法数据预处理的重要步骤。 体素化还广泛用于处理点云——子采样、特征提取和占用分析等。 最后,生成网格的体素表示对于创建游戏资产和简化模拟表面也很有用。
在本文中,我们将探讨四个 Python 库的体素化功能——Open3D、Trimesh、PyVista 和 pyntcloud。 我之所以选择这些库,是因为它们提供了相对简单的体素化功能,以及用于分析所创建体素的内置解决方案。 其他较小的库,如 PyVoxelizer、Voxelizer、simple-3dviz 和 DepthVisualizer 也提供体素化功能,但它们被认为过于有限。 另一个提供体素化功能的库是 Vedo,但在初步测试后,我发现它们是针对 3D 体积数据的,这限制了它们的使用。 如果你想了解更多有关如何使用这些库创建漂亮的可视化效果的信息以及更多内容,可以查看我之前关于“用于网格、点云和数据可视化的 Python 库”(第 1 部分和第 2 部分)的文章。 我们将使用的唯一一个之前没有讨论过的库是 pyntcloud,因此我们将更详细地介绍如何安装和设置它。
为了演示点云和网格上的体素化,我提供了两个对象。 首先是 .txt 格式的兔子雕像点云,其中包含每个点的 X、Y 和 Z 坐标,以及它们的 R、G 和 B 颜色,最后是 Nx、Ny 和 Nz 法线。 其次,.obj 格式的公鸡雕像网格,以及 .mat 文件和 .jpg 格式的纹理。 这两个对象都是使用 Structure from Motion photogrammetry 创建的,可以免费用于商业、非商业、公共和私人项目。 这些对象是更大数据集 [6] 的一部分,并已用于噪声检测和检查方法的开发 [7]。 要遵循教程,除了使用的库及其依赖项之外,你还需要 NumPy 和 SciPy。 所有代码都可以在 GitHub 存储库中找到。
1、使用 Open3D 进行体素化

Open3D 是用于 3D 分析、网格和点云操作以及可视化的功能最丰富的 Python 库之一。 它包含用于从点云和网格生成体素的优秀工具。 该库还支持大量 3D 图元,如球体、立方体、圆柱体等,这使得从体素生成 3D 网格变得容易。 最后,体素网格也可用于对点云进行子采样并生成分割。 有关如何安装和使用 Open3D 的分步教程,你可以查看我之前的文章“用于网格、点云和数据可视化的 Python 库(第 1 部分)”。 我们将使用很多相同的代码来进行可视化和回调。
我想再次指出 Florent Poux 博士的精彩教程。 — “How to Automate Voxel Modeling of 3D Point Cloud with Python”,他在其中给出了使用 Open3D 从点云生成体素的良好概述和用例。 在我的文章中,我以教程中提供的信息为基础。
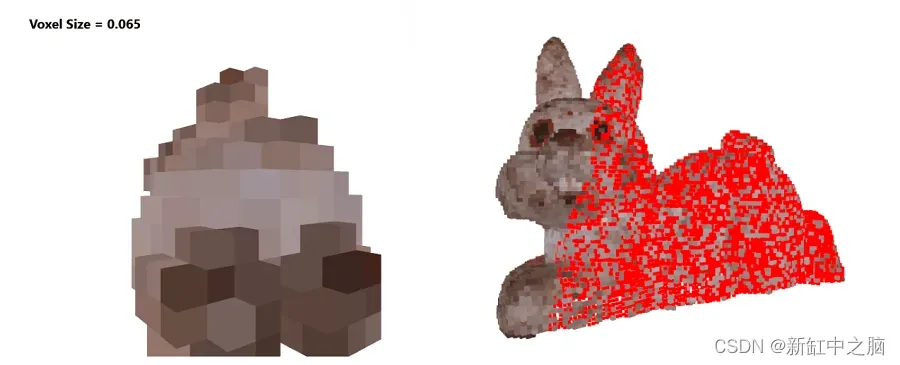
为了更好地理解体素化过程,我们将使用 Open3D 构建两个示例 – 一个可视化多个体素网格级别以及它们如何影响体素化模型,另一个显示体素化过程。
我们首先使用 NumPy 的 loadtxt() 函数加载兔子雕像点云。 我们将数组分成点、颜色和法线,并通过首先使用 Vector3dVector 函数将数组转换为向量来创建 Open3D 点云。 从这里通过调用 VoxelGrid.create_from_point_cloud() 并为其提供点云和体素大小参数来创建体素网格是微不足道的。 如果我们从网格开始,我们可以用 create_from_triangle_mesh() 做同样的事情。 如果我们使用体素网格来操作和分析 Open3D 中的点云/网格,我们可以到此为止。 我们还可以通过调用将体素网格作为几何图形添加到 Visualizer 对象来快速可视化体素网格。 下面给出了此代码。
# Read the bunny statue point cloud using numpy's loadtxt
point_cloud_path = os.path.join('point_cloud','bunnyStatue.txt')
point_cloud = np.loadtxt(point_cloud_path, delimiter=' ')
# Separate the into points, colors and normals array
points = point_cloud[:,:3]
colors = point_cloud[:,3:6]
normals = point_cloud[:,6:]
# Initialize a point cloud object
pcd = o3d.geometry.PointCloud()
# Add the points, colors and normals as Vectors
pcd.points = o3d.utility.Vector3dVector(points)
pcd.colors = o3d.utility.Vector3dVector(colors)
pcd.normals = o3d.utility.Vector3dVector(normals)
# Create a voxel grid from the point cloud with a voxel_size of 0.01
voxel_grid=o3d.geometry.VoxelGrid.create_from_point_cloud(pcd,voxel_size=0.01)
# Initialize a visualizer object
vis = o3d.visualization.Visualizer()
# Create a window, name it and scale it
vis.create_window(window_name='Bunny Visualize', width=800, height=600)
# Add the voxel grid to the visualizer
vis.add_geometry(voxel_grid)
# We run the visualizater
vis.run()
# Once the visualizer is closed destroy the window and clean up
vis.destroy_window()
我们还想继续处理体素网格并将其转换为网格,因为我们想用它创建动画,而在撰写本文时体素网格无法转换。 我们使用 Florent Poux 博士提出的方法。 我们通过调用 geometry.TriangleMesh() 创建一个空的三角形网格,然后我们通过调用 voxel_grid.get_voxels() 并获取创建的体素的真实大小从网格中提取所有体素。 这样我们就可以在每个体素位置创建一个 Open3D 框基元,将框缩放到体素的大小并通过调用 voxel_grid.get_voxel_center_coordinate() 将它们定位在体素中心。 我们最终将如此创建、缩放和定位的框添加到 TriangleMesh 对象。
为了演示不同的体素网格大小如何改变最终的体素输出并使示例更有趣一点,我们将在体素输出之间制作旋转过渡动画。 为此,我们通过调用 register_animation_callback() 向 Visualizer 注册一个新的回调。 在回调函数中,我们生成体素网格并从中创建体素网格我们将由此创建的网格旋转 360 度,破坏网格并使用不同大小的体素网格重复。 我们还利用一个小类来保存将在回调更新循环中更改的所有变量。 下面给出了完整旋转可视化的代码。
import numpy as np
import open3d as o3d
import os
# Parameters class holding variables that change in the callback function
class params():
# counter for the rotation
counter = 0
# counter for selecting a new voxel size
sizes_counter = 0
# array of voxel sizes between 0.01 and 0.1
voxel_sizes = np.arange(0.01,0.1,0.005)
# empty TriangleMesh object that will contain the cubes
vox_mesh = o3d.geometry.TriangleMesh()
# boolean value used for initial initialization of the voxel mesh
initialize = True
# Callback function used to construct and rotate the voxel meshes
def rotate_and_change(vis):
# When the counter is 0 generate the voxel grid and construct the voxel mesh
if params.counter == 0:
# generate the voxel grid using the voxel sizes setup in the params class
voxel_grid=o3d.geometry.VoxelGrid.create_from_point_cloud(pcd,voxel_size=params.voxel_sizes[params.sizes_counter])
# get all voxels in the voxel grid
voxels_all= voxel_grid.get_voxels()
# geth the calculated size of a voxel
voxel_size = voxel_grid.voxel_size
# loop through all the voxels
for voxel in voxels_all:
# create a cube mesh with a size 1x1x1
cube=o3d.geometry.TriangleMesh.create_box(width=1, height=1, depth=1)
# paint it with the color of the current voxel
cube.paint_uniform_color(voxel.color)
# scale the box using the size of the voxel
cube.scale(voxel_size, center=cube.get_center())
# get the center of the current voxel
voxel_center = voxel_grid.get_voxel_center_coordinate(voxel.grid_index)
# translate the box to the center of the voxel
cube.translate(voxel_center, relative=False)
# add the box to the TriangleMesh object
params.vox_mesh+=cube
# on the first run of the callback loop initialize the Triangle mesh by adding it to the Visualizer. In subsequent iterations just update the geometry
if params.initialize:
vis.add_geometry(params.vox_mesh)
params.initialize = False
else:
vis.update_geometry(params.vox_mesh)
# We create a 3D rotation matrix from x,y,z rotations, the rotations need to be given in radians
R = params.vox_mesh.get_rotation_matrix_from_xyz((0, np.deg2rad(2), 0))
# The rotation matrix is applied to the specified object - in our case the voxel mesh. We can also specify the rotation pivot center
params.vox_mesh.rotate(R, center=(0, 0, 0))
# tick the counter up
params.counter+=1
# For the changes to be seen we need to update both the geometry that has been changed and to update the whole renderer connected to the visualizer
vis.update_geometry(params.vox_mesh)
vis.update_renderer()
# When the counter gets to 180 we zero it out. This is done because we rotate the mesh by 2 degrees on an iteration
if params.counter >= 180:
params.counter=0
# we tick the voxel size counter
params.sizes_counter +=1
# if the voxel size counter becomes equal to the size of the voxel sizes array, reset it
if params.sizes_counter >= len(params.voxel_sizes):
params.sizes_counter=0
# each time we clear the mesh. This is important, because without it we will just add more and more box primitives to the mesh object
params.vox_mesh.clear()
# Read the bunny statue point cloud using numpy's loadtxt
point_cloud_path = os.path.join('point_cloud','bunnyStatue.txt')
point_cloud = np.loadtxt(point_cloud_path, delimiter=' ')
# Separate the into points, colors and normals array
points = point_cloud[:,:3]
colors = point_cloud[:,3:6]
normals = point_cloud[:,6:]
# Initialize a point cloud object
pcd = o3d.geometry.PointCloud()
# Add the points, colors and normals as Vectors
pcd.points = o3d.utility.Vector3dVector(points)
pcd.colors = o3d.utility.Vector3dVector(colors)
pcd.normals = o3d.utility.Vector3dVector(normals)
# Create a voxel grid from the point cloud with a voxel_size of 0.01
# voxel_grid=o3d.geometry.VoxelGrid.create_from_point_cloud(pcd,voxel_size=0.01)
# Initialize a visualizer object
vis = o3d.visualization.Visualizer()
# Create a window, name it and scale it
vis.create_window(window_name='Bunny Visualize', width=800, height=600)
# Add the voxel grid to the visualizer
# vis.add_geometry(voxel_grid)
# Register the callback function
vis.register_animation_callback(rotate_and_change)
# We run the visualizater
vis.run()
# Once the visualizer is closed destroy the window and clean up
vis.destroy_window()
为了更好地理解创建体素和体素网格的过程,我们将通过动画将其可视化。 此可视化的代码与我们已经展示的代码非常相似,但这次我们通过添加每个新体素作为回调函数循环的一部分来可视化创建体素网格的过程。 为了得到兔子雕像的轮廓,我们还使用体素函数 get_voxel_center_coordinates 来提取体素中心并使用它们生成点云。 通过这种方式,我们以迂回的方式生成输入点云的二次采样和统一采样版本。 下面给出了整个可视化的代码。

import numpy as np
import open3d as o3d
import os
# Helper parameters class containing variables that will change in the callback function
class params():
# voxels counter that will stop the voxel mesh generation when there are no more voxels in the voxel grid
counter = 0
vox_mesh=o3d.geometry.TriangleMesh()
# Voxel builder callback function
def build_voxels(vis):
# check if the counter is more than the amount of voxels
if params.counter < len(voxels_all):
# get the size of the voxels
voxel_size = voxel_grid.voxel_size
# create a box primitive of size 1x1x1
cube=o3d.geometry.TriangleMesh.create_box(width=1, height=1, depth=1)
# paint the box uniformly with the color of the voxel
cube.paint_uniform_color(voxels_all[params.counter].color)
# scale the box to the size of the voxel
cube.scale(voxel_size, center=cube.get_center())
# get the center position of the current voxel
voxel_center = voxel_grid.get_voxel_center_coordinate(voxels_all[params.counter].grid_index)
# translate the box to the voxel center
cube.translate(voxel_center, relative=False)
# add the box primitive to the voxel mesh
params.vox_mesh+=cube
# on the first loop create the geometry and on subsequent iterations update the geometry
if params.counter==0:
vis.add_geometry(params.vox_mesh)
else:
vis.update_geometry(params.vox_mesh)
# update the renderer
vis.update_renderer()
# tick up the counter
params.counter+=1
# Read the bunny statue point cloud using numpy's loadtxt
point_cloud_path = os.path.join('point_cloud','bunnyStatue.txt')
point_cloud = np.loadtxt(point_cloud_path, delimiter=' ')
# Separate the into points, colors and normals array
points = point_cloud[:,:3]
colors = point_cloud[:,3:6]
normals = point_cloud[:,6:]
# Initialize a point cloud object
pcd = o3d.geometry.PointCloud()
# Add the points, colors and normals as Vectors
pcd.points = o3d.utility.Vector3dVector(points)
pcd.colors = o3d.utility.Vector3dVector(colors)
pcd.normals = o3d.utility.Vector3dVector(normals)
# Create a voxel grid from the point cloud with a voxel_size of 0.01
voxel_grid=o3d.geometry.VoxelGrid.create_from_point_cloud(pcd,voxel_size=0.01)
# Get all the voxels in the voxel grid
voxels_all= voxel_grid.get_voxels()
# get all the centers and colors from the voxels in the voxel grid
all_centers=[]
all_colors=[]
for voxel in voxels_all:
voxel_center = voxel_grid.get_voxel_center_coordinate(voxel.grid_index)
all_centers.append(voxel_center)
all_colors.append(voxel.color)
# Initialize a visualizer object
vis = o3d.visualization.Visualizer()
# Create a window, name it and scale it
vis.create_window(window_name='Bunny Visualize', width=800, height=600)
# Create a point cloud that will contain the voxel centers as points
pcd_centers = o3d.geometry.PointCloud()
# Tranform the numpy array into points for the point cloud
pcd_centers.points = o3d.utility.Vector3dVector(all_centers)
# pcd_centers.colors = o3d.utility.Vector3dVector(all_colors)'
pcd_centers.paint_uniform_color([1, 0, 0])
# Add the voxel centers point cloud to the visualizer
vis.add_geometry(pcd_centers)
# Invoke the callback function
vis.register_animation_callback(build_voxels)
# We run the visualizater
vis.run()
# Once the visualizer is closed destroy the window and clean up
vis.destroy_window()
2、使用 Pyntcloud 进行体素化

Pyntcloud 是一个轻量级且功能强大的 Python 3 库,用于点云和网格的分析和预处理。 它包含用于体素化、特征提取、网格平滑和抽取、点云子采样、异常值检测等的工具。 它被直接用作 jupyter 笔记本的一部分,并包含 threejs、pythreejs、PyVista 和 matplotlib 的可视化绑定。 它可以轻松集成到其他大型库(如 Open3D 和 PyVista)的工作流程中。
pyntcloud 的体素化功能非常强大,具有体素表示,已经包含许多预先计算的特征,如体素到点的对应关系、体素网格段信息、每个体素中的点密度和二进制掩码等。
Pyntcloud 在 Linux、Mac 和 Windows 上使用 Python 3。 它需要 NumPy 和 Pandas 作为先决条件。 该库在不断发展,每月更新一次。 它可以使用 pip 或 Anaconda 安装。 我们通常将每个库安装在一个新的 Anaconda 环境中以保持一切整洁,但在这种情况下,我们将与 Open3d 一起安装 pyntcloud 以利用前者的可视化功能。 我们这样做是因为 pyntcloud 中的体素和网格可视化需要 threejs 或 pythreejs,而这又需要 jupyter 笔记本或启动本地服务器。 这些超出了本文的范围,但我仍将举例说明如何直接在 pyntcloud 中可视化体素。
conda create -n pyntcloud_env python=3.8
conda activate pyntcloud_env
pip install open3d
pip install pyntcloud
OR
conda install pyntcloud -c conda-forge
一旦我们安装了所有东西并且没有出现错误,我们就可以通过首先调用 import open3d as o3d 和 print(o3d.version) 然后调用 from pyntcloud import PyntCloud 和 print(PyntCloud.version) 来测试这两个库。 如果导入了两个库,我们就可以继续学习教程。
pyntcloud 的 I/O 模块无论好坏都非常简化。 它使用 PyntCloud.from_file() 来加载网格和点云。 该函数根据需要加载的文件的扩展名来决定调用哪些内部函数。 有关 pyntcloud 所有支持的文件类型的列表,可以在此处阅读他们的 I/O 页面。 对于包含点云的 ASCII 文件,pyntcloud 直接调用 Pandas 并需要额外的输入参数,如分隔符、列名、是否有标题部分等。在本教程中,我们导入兔子雕像点云,需要明确 指定所有列的名称。 加载点云后,我们需要调用 .add_structure(“voxelgrid”, grid_size_x, grid_size_y, grid_size_z) 在点云之上创建体素网格。 此函数的输出是体素网格 ID,其中点云中的点与网格相交。 然后我们使用这些 id 通过调用 name_of_point_cloud.structures[voxelgrid_ids] 创建点云的占用体素表示。 从这里开始,我们可以使用此对象来提取体素信息并可视化所有内容。 下面给出了导入点云和提取体素的代码。
# Set up the path to the point cloud
point_cloud_path = os.path.join('point_cloud','bunnyStatue.txt')
# Load the point cloud. As internally from_file is calling Pandas, we set Pandas input parameters like separator, header and column names
cloud = PyntCloud.from_file(point_cloud_path, sep=" ", header=0, names=["x","y","z","r","g","b","nx","ny","nz"])
# We use the imported point cloud to create a voxel grid of size 64x64x64.
voxelgrid_id = cloud.add_structure("voxelgrid", n_x=64, n_y=64, n_z=64)
# We use the calculated occupied voxel grid ids to create the voxel representation of the point cloud
voxelgrid = cloud.structures[voxelgrid_id]
# We extract the density feature for each occupied voxel that we will use for coloring the voxels
density_feature_vector = voxelgrid.get_feature_vector(mode="density")
# Calculate the maximum density to normalize the colors
max_density = density_feature_vector.max()
# We extract the shape of a voxel, as well as the position of each point in X, Y, Z in the voxel grid
voxel_size = voxelgrid.shape
x_cube_pos = voxelgrid.voxel_x
y_cube_pos = voxelgrid.voxel_y
z_cube_pos = voxelgrid.voxel_z
一旦我们创建了点云的体素表示,我们就可以通过调用 voxelgrid.plot(cmap=“hsv”, backend=“threejs”)使用 pyntcloud 直接将其可视化。 可以在此处调用不同的后端,但对于网格和体素,仅支持 threejs 和 pythreejs。 为了能够在不需要运行服务器的情况下更轻松地可视化所有内容,我们将创建的体素网格传输到 Open3D 并使用 Open3D 部分中显示的技术将其可视化。 通过这种方式,我们还展示了结合这两个库、利用它们的优势是多么容易。
我们首先创建一个空的 Open3D geometry.TriangleMesh(),它将被体素填充。 然后我们遍历 pyntcloud 体素网格上的所有体素。 我们可以从 voxelgrid.voxel_n 数组中获取当前的体素 id,我们可以使用这个 id 通过调用 voxelgrid.voxel_centers[voxel_id] 来获取它的体素中心。 为了获得我们将用作体素颜色的密度值,我们使用我们已经提取的体素网格中体素的 X、Y 和 Z 位置。 从这里开始,一切都与 Open3D 示例中的相同。 我们给框基元上色,缩放它并将它转换到体素中心。 最后,我们初始化 Open3D 可视化器并将创建的体素网格作为几何体添加到其中。 下面给出了完整的 pyntcloud/Open3D 可视化代码。
from pyntcloud import PyntCloud
import os
import open3d as o3d
# Set up the path to the point cloud
point_cloud_path = os.path.join('point_cloud','bunnyStatue.txt')
# Load the point cloud. As internally from_file is calling Pandas, we set Pandas input parameters like separator, header and column names
cloud = PyntCloud.from_file(point_cloud_path, sep=" ", header=0, names=["x","y","z","r","g","b","nx","ny","nz"])
# We use the imported point cloud to create a voxel grid of size 64x64x64.
voxelgrid_id = cloud.add_structure("voxelgrid", n_x=64, n_y=64, n_z=64)
# We use the calculated occupied voxel grid ids to create the voxel representation of the point cloud
voxelgrid = cloud.structures[voxelgrid_id]
# We extract the density feature for each occupied voxel that we will use for coloring the voxels
density_feature_vector = voxelgrid.get_feature_vector(mode="density")
# Calculate the maximum density to normalize the colors
max_density = density_feature_vector.max()
# We extract the shape of a voxel, as well as the position of each point in X, Y, Z in the voxel grid
voxel_size = voxelgrid.shape
x_cube_pos = voxelgrid.voxel_x
y_cube_pos = voxelgrid.voxel_y
z_cube_pos = voxelgrid.voxel_z
# Initialize a open3d triangle mesh object
vox_mesh = o3d.geometry.TriangleMesh()
# go through all voxelgrid voxels
for idx in range(0, len(voxelgrid.voxel_n)):
# get the id of the current voxel in the voxel grid
curr_number = voxelgrid.voxel_n[idx]
# get the center of the voxel grid voxel
voxel_center = voxelgrid.voxel_centers[curr_number]
# get the density value of the current voxel. Because the density matrix is in the shape X,Y,Z, where they are the coordinates in the voxel grid
# we use the voxel grid positions we already
curr_density = density_feature_vector[x_cube_pos[idx],y_cube_pos[idx],z_cube_pos[idx]]
# we normalize the value using the maximum density
curr_density_normalized = curr_density / max_density
# create a box primitive in open3d
primitive=o3d.geometry.TriangleMesh.create_box(width=1, height=1, depth=1)
# paint the box uniformly using the normalized density
primitive.paint_uniform_color((curr_density_normalized,curr_density_normalized,curr_density_normalized))
# scale the cube using the saved voxel size
primitive.scale(voxel_size[0], center=primitive.get_center())
# we translate the box to the center position of the voxel
primitive.translate(voxel_center, relative=True)
# add to the voxel mesh
vox_mesh+=primitive
# Initialize a visualizer object
vis = o3d.visualization.Visualizer()
# Create a window, name it and scale it
vis.create_window(window_name='Bunny Visualize', width=800, height=600)
# add the voxel mesh to the visualizer
vis.add_geometry(vox_mesh)
vis.run()
# Once the visualizer is closed destroy the window and clean up
vis.destroy_window()
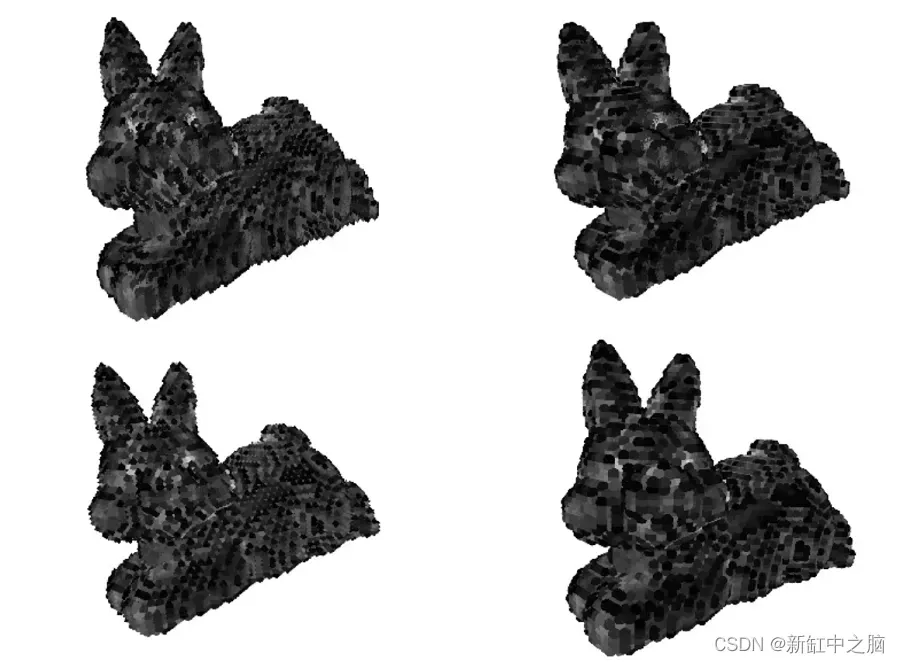
为了获得更多乐趣,我们可以在用其他基元创建体素网格时替换框基元。 Open3D 有大量的图元——球体、圆柱体、环面、八面体、圆锥体等。我们创建了一个小的选择函数,它采用图元的名称并返回 3D 对象。 然后我们唯一改变的是 primitive = o3d.geometry.TriangleMesh.createbox() 到新函数调用 primitive = choose_primitive(“cylinder”)。 该函数的代码如下所示。
# Selection function which takes a name of the primitive and returns a mesh object
# For the sphere and torus we lower the default resolution values so they can be visualized easier
def choose_primitive(name):
return {
'box': o3d.geometry.TriangleMesh.create_box(),
'cone': o3d.geometry.TriangleMesh.create_cone(),
'sphere': o3d.geometry.TriangleMesh.create_sphere(resolution=5),
'cylinder': o3d.geometry.TriangleMesh.create_cylinder(),
'icosahedron': o3d.geometry.TriangleMesh.create_icosahedron(),
'octahedron': o3d.geometry.TriangleMesh.create_octahedron(),
'torus': o3d.geometry.TriangleMesh.create_torus( radial_resolution=10, tubular_resolution=5)
}[name]
3、使用 Trimesh 进行体素化

Trimesh 是使用最广泛的用于处理网格的 Python 库之一。 大量其他库和独立项目使用它或直接构建在它之上。 它提供了大量的点云和网格分析和转换工具。 有关 Trimesh 的安装说明和可视化使用示例,你可以查看文章“用于网格、点云和数据可视化的 Python 库(第 1 部分)”,我们在其中展示了如何处理网格和点数据集。
对于体素化,Trimesh 有许多方法来创建体素网格,在内部挖空它们,以及使用闭合和二进制膨胀等形态学操作填充它们。 它还具有通过分别调用 trimesh.voxel.morphology.surface 和 trimesh.voxel.morphology.fill 来提取体素网格的表面或填充的直接方法。 该库还提供了用于快速分析体素化网格的工具,例如提取边界、检查网格中的体素空间是空的还是填充的,以及计算占用体素的比例和体积。 执行行进立方体计算的功能也很容易获得。
Trimesh 的一个非常棘手的功能是提取网格的纹理颜色信息并将其作为颜色提供给体素表示。 为此,我们首先提取纹理信息并将其作为颜色信息映射到网格的每个顶点。 这是通过调用 name_of_the_imported_mesh.visual.to_color().vertex_colors 来完成的。 然后我们可以将其转换为 NumPy 数组并为每个网格顶点自由访问它。 然后我们可以通过直接调用 name_of_the_imported_mesh.voxelized().hollow() 从网格创建体素网格,我们可以在其中指定体素网格的分辨率。 我们还将体素化转换为空心表示,因为我们需要计算网格和体素表示之间的距离。
由于 Trimesh 不包含将网格颜色直接映射到体素表示的体素的功能,我们先要调用 trimesh.proximity.ProximityQuery(name_of_the_mesh).vertex(voxel_grid_name.points) 来计算网格的每个顶点和 已经创建的体素表示点。 然后我们需要遍历每个点,提取最近的网格顶点的颜色,并将其映射到大小为 (X,Y,Z,4)的颜色数组中,其中X,Y,Z是生成的大小 体素网格和 3 是颜色的 R、G、B 和 A 分量。 一旦我们有了映射,我们就可以调用 voxel_grid_name.as_boxes(colors = mapped_color_array),这使得体素网格成为一个 Trimesh 网格对象,体素/框颜色等于初始网格的颜色。 读者在运行代码时会看到的一件事是体素化网格中有孔。 这很可能是因为公鸡雕像网格由于运动过程中的结构不是完全水密的。 下面给出了体素化过程的代码。
import trimesh
import numpy as np
# Load the rooster mesh. Trimesh directly detects that the mesh is textured and contains a material
mesh_path = 'mesh/rooster.obj'
mesh = trimesh.load(mesh_path)
# Voxelize the loaded mesh with a voxel size of 0.01. We also call hollow() to remove the inside voxels, which will help with color calculation
angel_voxel = mesh.voxelized(0.01).hollow()
# Transform the texture information to color information, mapping it to each vertex. Transform it to a numpy array
only_colors = mesh.visual.to_color().vertex_colors
only_colors = np.asarray(only_colors)
# If we want to add the color information to the mesh uncomment this part
# mesh.visual = mesh.visual.to_color()
# Extract the mesh vertices
mesh_verts = mesh.vertices
# We use the ProximityQuery built-in function to get the closest voxel point centers to each vertex of the mesh
_,vert_idx = trimesh.proximity.ProximityQuery(mesh).vertex(angel_voxel.points)
# We initialize a array of zeros of size X,Y,Z,4 to contain the colors for each voxel of the voxelized mesh in the grid
cube_color=np.zeros([angel_voxel.shape[0],angel_voxel.shape[1],angel_voxel.shape[2],4])
# We loop through all the calculated closest voxel points
for idx, vert in enumerate(vert_idx):
# Get the voxel grid index of each closets voxel center point
vox_verts = angel_voxel.points_to_indices(mesh_verts[vert])
# Get the color vertex color
curr_color = only_colors[vert]
# Set the alpha channel of the color
curr_color[3] = 255
# add the color to the specific voxel grid index
cube_color[vox_verts[0],vox_verts[1], vox_verts[2],:] = curr_color
# generate a voxelized mesh from the voxel grid representation, using the calculated colors
voxelized_mesh = angel_voxel.as_boxes(colors=cube_color)
# Initialize a scene
s = trimesh.Scene()
# Add the voxelized mesh to the scene. If want to also show the intial mesh uncomment the second line and change the alpha channel of in the loop to something <100
s.add_geometry(voxelized_mesh)
# s.add_geometry(mesh)
s.show()
4、使用 PyVista 进行体素化
PyVista 是一个功能齐全的网格可视化和分析库,建立在 VTK 之上。 它可用于创建包含多个窗口、GUI 元素以及通过鼠标、键盘和 GUI 进行交互的复杂应用程序。 该库使用过滤例程来转换点云和网格并提取任何所需信息。 它可以用作物理模拟、计算机图形学、GIS、建筑可视化、光线追踪和数学计算展示的一部分。 有关 PyVista 的安装说明和可视化使用示例,你可以查看文章“用于网格、点云和数据可视化的 Python 库(第 1 部分)”,我们在其中展示了如何处理网格和点数据集。
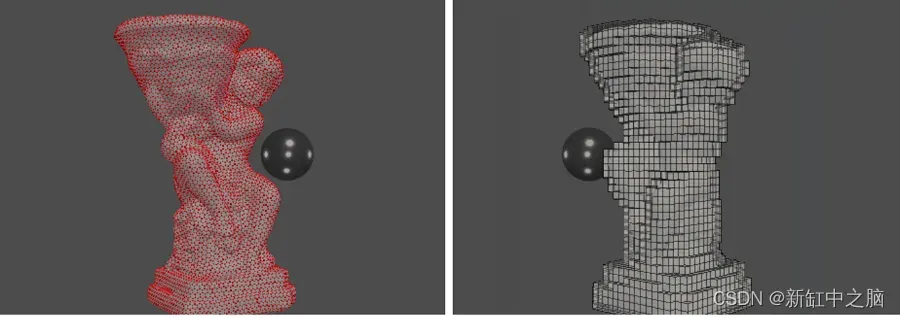
由于 PyVista 建立在 VTK 之上,它包含一个直接的接口,用于将网格转换为 UniformGrid 对象以构建体素表示。 需要提及的重要一点是 PyVista 只能用于网格的体素化。 如果给定点云,首先需要将其三角化成网格。 对于更简单的点云表面,这可以使用 delaunay_3d 三角测量直接在 PyVista 中完成。 另一个重点是 PyVista 默认情况下期望水密网格用于体素化。 如果网格有孔、重叠边或其他不正确的几何图形,尝试对其进行体素化将导致错误。 体素化是通过调用 pyvista.voxelize(input_mesh) 完成的。 如果此方法抛出使用的网格不防水的错误,则有两种方法可以继续 – 在其他软件(如 Blender)中修复网格或添加参数 check_surface=False。 如果网格中有小瑕疵,第二种方法将产生良好的结果,没有任何噪音或伪影。 请注意,如果存在大孔或几何缺陷,跳过表面检查可能会导致不正确的体素化和噪声。
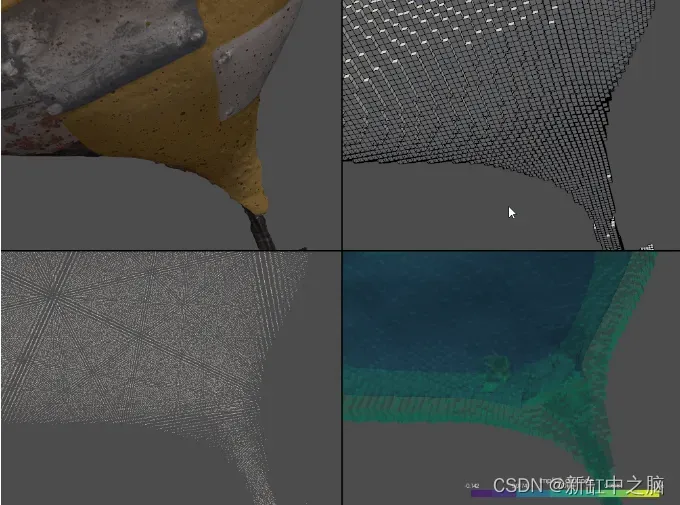
一旦调用体素化,结果就是一个包含所有体素的统一网格对象。 然后可以从表示中提取其他信息,如体素中心、每个体素的 X、Y、Z 边界坐标、包含部分网格的体素的凸包等。体素表示的有用分析在中给出 PyVista 的例子。 一旦我们有了体素,我们就可以调用 compute_implicit_distance 来计算体素和网格之间的距离。 这对于检查体素化过程是否存在任何不一致以及用于过滤掉网格内部的体素以创建空心体素表示非常有用。 另一个有用的转换是使用与立方体不同的原始对象来表示体素。 这可以在调用 voxelize 时直接设置,也可以稍后通过调用 voxelized_object.glyph(geom = type_of_primitive()) 创建。 最后,对于这一部分,我们还将在单独的子窗口中可视化所有内容并将它们链接起来。 这是以与 matplotlib 相同的方式完成的,其中窗口数在设置 pyvista.Plotter(shape=(num_horiz_windows,num_vertical_windows)) 时给出。 一旦设置好,每个子窗口都可以通过调用 pyvista.subplot(horizontal_num, vertical_num) 来调用。 下面给出了用于生成输入网格的四个子窗口可视化、立方体体素化表示、圆锥体素化表示以及网格和体素之间距离的代码。
import pyvista as pv
import os
# Load mesh and texture into PyVista
mesh_path = os.path.join('mesh','rooster.obj')
mesh = pv.read(mesh_path)
tex_path = os.path.join('mesh','rooster01.jpg')
tex = pv.read_texture(tex_path)
# Initialize the plotter object with four sub plots
pl = pv.Plotter(shape=(2, 2))
# First subplot show the mesh with the texture
pl.subplot(0, 0)
pl.add_mesh(mesh,name='rooster',texture = tex)
# Second subplot show the voxelized repsentation of the mesh with voxel size of 0.01. We remove the surface check as the mesh has small imperfections
pl.subplot(0, 1)
voxels = pv.voxelize(mesh, density=0.01, check_surface=False)
# We add the voxels as a new mesh, add color and show their edges
pl.add_mesh(voxels, color=True, show_edges=True)
# Third subplot shows the voxel representation using cones
pl.subplot(1,0)
glyphs = voxels.glyph(factor=1e-3, geom=pv.Cone())
pl.add_mesh(glyphs)
# Forth subplot shows the voxels together with a contour showing the per voxel distance to the mesh
pl.subplot(1,1)
# Calculate the distance between the voxels and the mesh. Add the results as a new scalar to the voxels
voxels.compute_implicit_distance(mesh, inplace=True)
# Create a contour representing the calculated distance
contours = voxels.contour(6, scalars="implicit_distance")
# Add the voxels and the contour with different opacity to show both
pl.add_mesh(voxels, opacity=0.25, scalars="implicit_distance")
pl.add_mesh(contours, opacity=0.5, scalars="implicit_distance")
# Link all four views so all cameras are moved at the same time
pl.link_views()
# Set camera start position
pl.camera_position = 'xy'
# Show everything
pl.show()
我们将使用体素化上下文来展示如何在 PyVista 中创建一个简单的 GUI 并向生成过程添加交互性。 首先,一个简短的例子演示了如何为每个体素生成点密度。 选择它是因为这是一个有用的分析步骤,PyVista 中没有开箱即用的步骤。 为此,需要 SciPy 的 KDTree 功能。 我们使用它来获取每个体素中心的所有相邻网格顶点。 SciPy 有函数 query_ball_point,它创建一个以点为中心、指定半径的球体,并获取它的所有相邻点。 当然,当我们在体素立方体形状内搜索点时,使用球体会导致不完美的结果。 对于本教程,我们将使用这种简化。 为了计算球体的半径,使其具有与体素立方体相同的体积,我们使用已知的立方体边 x 来首先找到立方体的体积:
![]()
接下来,我们得到球体的体积:
![]()
如果想要两个体积相等,我们可以计算半径为:
![]()
这可以用 Python 编写在一个小的辅助函数中,如下所示。
def calculate_sphere_radius(voxel_size):
voxel_volume = voxel_size ** 3
radius = ((3*voxel_volume)/(4*np.pi))**(1/3)
return radius
一旦我们拥有每个体素中心附近的所有顶点,我们就会对它们进行计数并将它们除以最大计数以将它们归一化在 0 和 1 之间以进行可视化。 最后,我们将这些值作为一个字段添加到体素中。 该代码被分成下面给出的另一个函数。
# Function to generate density for each voxel and add it as a field
def calculate_neighbours(mesh, voxel_size = 0.01):
# voxelize the given mesh with a specified size voxels
voxels = pv.voxelize(mesh, density=voxel_size, check_surface=False)
# Get the voxel center points
voxel_centers = voxels.cell_centers().points
# Get the mesh vertices
mesh_vertices = mesh.points
# Calculate the KDTree of the mesh vertices from Scipy
kd_tree_vertices = KDTree(mesh_vertices)
# Call the sphere radius function and calculate the new radius
radius = calculate_sphere_radius(voxel_size)
# Use the calculated KDTree and radius to get the neighbors for each voxel center
neighbours = kd_tree_vertices.query_ball_point(voxel_centers,radius)
# Count the number of points for each voxel center
neighbour_count = [len(curr_neighbours) for curr_neighbours in neighbours]
# Cast to array and normalize between 0 and 1
neighbour_count = np.array(neighbour_count, dtype=np.float32)
neighbour_density = neighbour_count/neighbour_count.max()
# Add the density as a field to the voxels
voxels['density'] = neighbour_density
return voxels
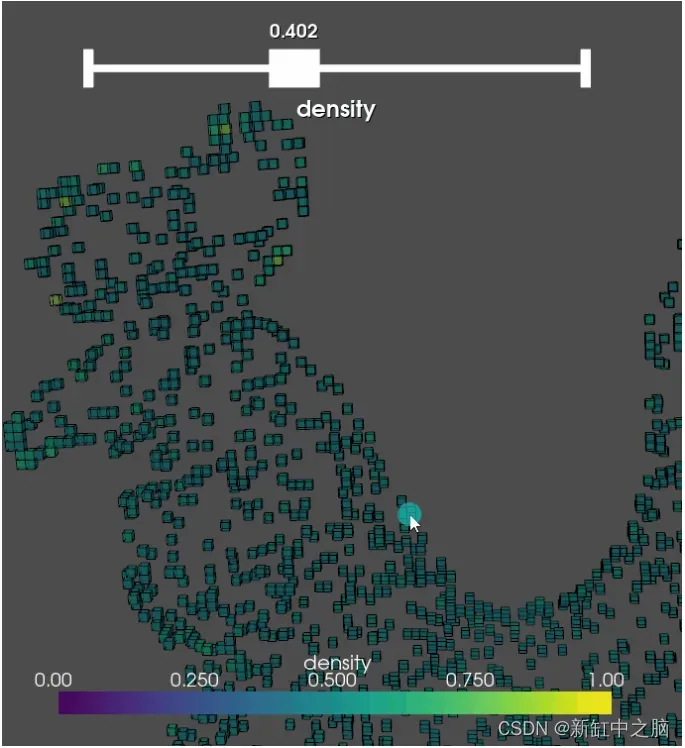
PyVista 包含一个随时可用的内置可视化工具,用于对网格和点云进行阈值处理,称为 add_mesh_threshold。 这直接将对象添加到场景中,并创建一个连接到最近活动字段或指定字段的滑块小部件。 下面给出了完整可视化的代码。
import pyvista as pv
import os
import numpy as np
from scipy.spatial import KDTree
# Function to calculate the radius of a sphere with an equal volume as a cube with a given side
def calculate_sphere_radius(voxel_size = 0.01):
voxel_volume = voxel_size ** 3
radius = ((3*voxel_volume)/(4*np.pi))**(1/3)
return radius
# Function to generate density for each voxel and add it as a field
def calculate_neighbours(mesh, voxel_size = 0.01):
# voxelize the given mesh with a specified size voxels
voxels = pv.voxelize(mesh, density=voxel_size, check_surface=False)
# Get the voxel center points
voxel_centers = voxels.cell_centers().points
# Get the mesh vertices
mesh_vertices = mesh.points
# Calculate the KDTree of the mesh vertices from Scipy
kd_tree_vertices = KDTree(mesh_vertices)
# Call the sphere radius function and calculate the new radius
radius = calculate_sphere_radius(voxel_size)
# Use the calculated KDTree and radius to get the neighbors for each voxel center
neighbours = kd_tree_vertices.query_ball_point(voxel_centers,radius)
# Count the number of points for each voxel center
neighbour_count = [len(curr_neighbours) for curr_neighbours in neighbours]
# Cast to array and normalize between 0 and 1
neighbour_count = np.array(neighbour_count, dtype=np.float32)
neighbour_density = neighbour_count/neighbour_count.max()
# Add the density as a field to the voxels
voxels['density'] = neighbour_density
return voxels
# Function to visualize and threshold the voxel representation based on the calculated density
def visualize_thresh(voxels):
p = pv.Plotter()
p.add_mesh_threshold(voxels,show_edges=True)
p.show()
if __name__ == '__main__':
mesh_path = os.path.join('mesh','rooster.obj')
mesh = pv.read(mesh_path)
voxels = calculate_neighbours(mesh)
visualize_thresh(voxels)
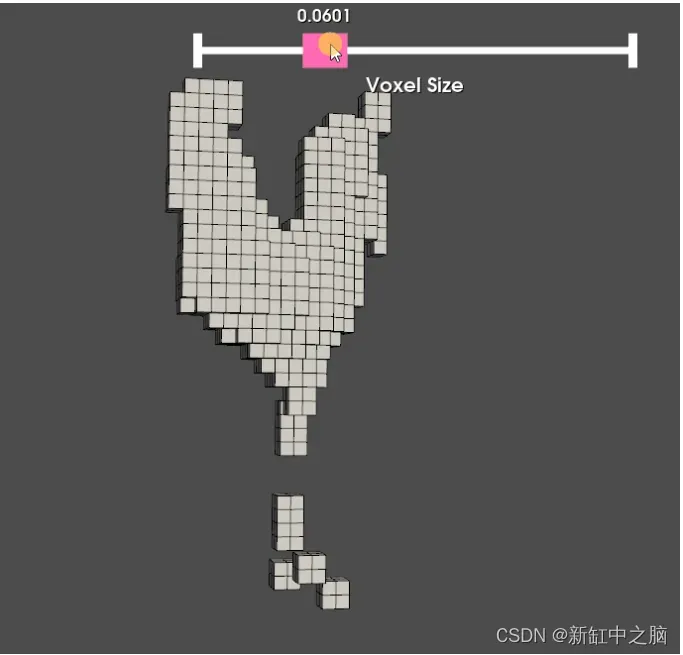
最后,我们将创建一个自定义滑块小部件来演示它在 PyVista 中是多么容易。 移动滑块将改变网格体素化的体素大小,并重新计算整个过程。 为了更整洁的包,我们将把所有东西都添加到一个类中。 要创建一个滑块小部件,我们只需要调用 add_slider_widget(name_of_callback_function, [min, max], start_value, title_of_widget, how_often_should_the_widget_call_callback)。 最后一个输入决定了当我们点击鼠标按钮、释放鼠标按钮或每次移动鼠标时是否调用回调函数。 在我们的例子中,我们使用最后一个选项。 在回调函数中,我们进行体素化计算并将其添加到绘图仪中。 在这里指定绘图仪中网格对象的名称很重要。 这样 PyVista 就知道我们正在更新同一个网格,而不是在每次移动滑块时都创建一个新网格。 下面给出了整个 GUI 交互的代码。
import pyvista as pv
import os
import numpy as np
# Class for interactive voxelization of a mesh with different sizes voxel based on a GUI slider
class visualize_voxel_levels():
# class initialization
def __init__(self,mesh, plotter):
self.plot = plotter
self.mesh = mesh
# Function for voxelization, which is called as a callback from the slider widget
def voxelize_mesh(self, value):
# The function gets the slider value as a input and calculates the voxel representation
voxels = pv.voxelize(self.mesh, density=value, check_surface=False)
# It then adds the voxels as a new mesh to the Plotter. Here it's important to not forget the name in the add_mesh,
# as this tells PyVista that this is the same mesh so it does not create a new one each time
self.plot.add_mesh(voxels, name='voxel_mesh', show_edges=True)
return
# Function for adding the widget to the Plotter and visualizing everything
def show_different_voxel_levels(self):
self.plot.camera_position = 'xy'
# Create a widget give it the callback function, a minimum and maximum range, initial value, title and event type -
# in our case it calls the callback function every time the widget slider is interacted with
self.plot.add_slider_widget(self.voxelize_mesh, [0.01, 0.2], 0.01, title='Voxel Size', event_type = "always")
self.plot.show()
if __name__ == '__main__':
# Load the rooster statue mesh
mesh_path = os.path.join('mesh','rooster.obj')
mesh = pv.read(mesh_path)
# Initialize the class and call the visualization function
vis_vox = visualize_voxel_levels(mesh, pv.Plotter())
vis_vox.show_different_voxel_levels()
5、结束语
在处理点云和网格时,体素化可能是你武器库中最强大的工具之一。 使用 Python 生成和处理体素非常简单。 在本文中,我们探讨了如何创建体素网格、从体素中提取特征以及将基元从立方体更改为球体、圆柱体、圆锥体等。我们还展示了如何完成体素构建过程,以及如何创建 交互式体素化和阈值工具。
拥有体素表示后,可以轻松地将其插入现有的深度学习或资产创建管道以实现所需的结果。 在接下来的文章中,我们将通过邻接分析、PCA 特征提取、RANSAC 实现等探索更多从点云和网格中提取特征和有用信息的方法。
原文链接:3D模型的体素化 — BimAnt
文章出处登录后可见!