TrackEval库虽然很专业,但是设置路径很麻烦,于是我自己基于TrackEval简单写了个对评测自己数据集更友好的,仅限2DMOT数据集,可以评测多类别。
项目地址(欢迎star!)https://github.com/JackWoo0831/Easier_To_Use_TrackEval
以下是使用说明:
Easier to use TrackEval
I. 仓库说明
鉴于TrackEval库写的略有些复杂, 可能对初学者不太友好, 因此我想
简单优化一下, 让评估自定义的数据集更加方便.
跑通代码最重要的就是路径问题, 为此我写了两个config模板, 让配置路径更简单.
仅支持2D MOT数据集
II. 使用方法
目录结构
一般MOT的数据集的目录结构可以分为两大类(如果有别的以后还会补充), 一个是像MOT Challenge这样的(例如: UAVDT)
# ${data_root}:
# |
# |___${train_folder_name}(Optional)
# |
# |____${seq_name}
# |_______${image_folder}
# |____${frame_name}
# |_______${gt_folder_name}
# |____${gt_txt_name}
# |___${test_folder_name}(Optional)
# |
# |____${seq_name}
# |_______${image_folder}
# |____${frame_name}
# |_______${gt_folder_name}
# |____${gt_txt_name}
例如, 如果我的MOT17数据集在/data/datasets/下, 其中的值就是:
data_root: /data/datasets/MOT17
train_folder_name: train, # 训练集文件夹名称
seq_name: MOT17-02-DPM, ..., MOT17-13-SDP, # 序列名称
image_folder: img1, # 存放序列帧图像文件夹的名称
frame_name: 000001.jpg, ..., 000600.jpg, ... , # 图片名称
gt_folder_name: gt # 真值文件夹名称
gt_txt_name: gt.txt # 真值文件的名称
test_folder_name: test
...同上
当然, 有的数据集没有划分训练集和测试集, 因此train_folder_name, train_folder_name也可以没有, 例如UAVDT数据集.
另一种是类似于yolo格式: (例如, Visdrone)
# ${data_root}:
# |
# |___${train_folder_name}(Optional)
# |
# |____${seq_folder_name}
# | |_______${seq_name}
# | |____${frame_name}
# |____${gt_folder_name}
# |____${gt_txt_name}
# |___${test_folder_name}(Optional)
# |
# |____${seq_folder_name}
# | |_______${seq_name}
# | |____${frame_name}
# |____${gt_folder_name}
# |____${gt_txt_name}
例如, Visdrone的测试集目录结构如下(训练集测试集同理):
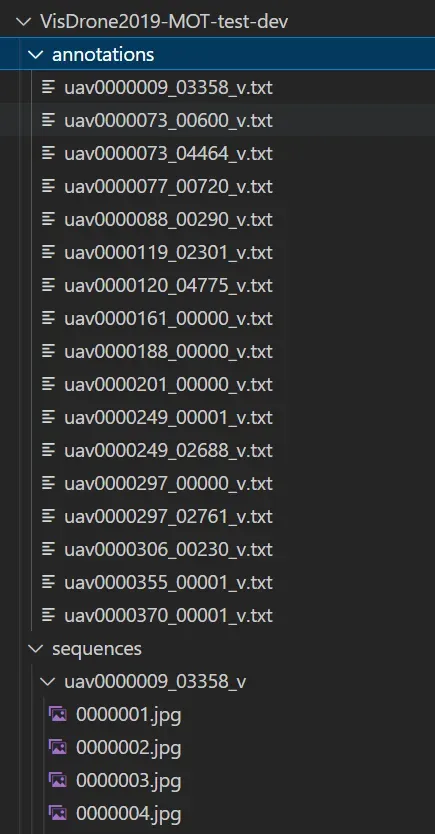
在该目录结构中, 真值文件夹和序列文件夹是平级的, 而不是包含在某个序列中. 因此对于Visdrone, 目录结构中的值如下:
data_root: /data/datasets/VisDrone
train_folder_name: VisDrone2019-MOT-train, # 训练集文件夹名称
seq_folder_name: sequences # 存放序列的文件夹的名称
seq_name: uav0000013_00000_v, ..., # 序列名称
frame_name: 0000002.jpg, ..., 00000200.jpg, ... , # 图片名称
gt_folder_name: annotations # 真值文件夹名称
gt_txt_name: {seq_name}.txt # 真值文件的名称, 与序列名称有关, 写成格式化字符串形式
test_folder_name: test
...同上
All you do is to fill in!
您只需按照以下步骤设置:
- 选择一个数据集的目录结构模板(
configs/template1.yaml或者configs/template2.yaml), 然后按照您的数据集的文件夹名称填入gt_structure_config中对应的值,
注意,
gt_loc_format需要谨慎检查, 它的意思是找到一个序列的真值txt的路径. 这是一个格式化的字符串, 里面的变量是gt_structure_config中的变量, 因此名称要保持一致. 如果您的数据集有轻微的差别, 也仅仅需要修改这个地方.
设置其他信息: 您的数据集对应的:
序列信息:
SEQ_INFO:
序列名称: 序列长度
需要评测的类别名称:
CLASSES_TO_EVAL:
- 类别1
- 类别2
- ...
类别名称到类别id的映射关系:
CLASS_NAME_TO_CLASS_ID:
类别名称: 类别id
有效类别(和CLASSES_TO_EVAL一致):
VALID_CLASS:
- 类别1
- 类别2
- ...
设置干扰类别:
(这部分的作用是将跟踪结果中的这部分类别的结果扣去)
DISTRACTOR_CLASSES_NAMES:
- 类别5
- 类别6
- ...
- 将您的跟踪结果放在本工程目录的
./result下, 如果您要对比多个跟踪器的性能, 按照如下目录设置:
result
|
|____tracker1_name
|
|______{seq_name}.txt...
|
|____tracker2_name
|
|______{seq_name}.txt...
并将template.yaml中的has_tracker_name设置为True
如果不需要, 直接按照如下目录:
result
|
|______{seq_name}.txt...
并将template.yaml中的has_tracker_name设置为False
- 运行!
将./run_custom.sh中命令的template_type参数设置一下, 随后
bash run_custom.sh
一个示例
下面用一个小demo来演示一下. 我随便选取了MOT17数据集中的一个txt文件, 作为真值, 同时作为我的模型的跟踪结果.
随后我放在/data/datasets/my_test_data下, 目录结构如下:
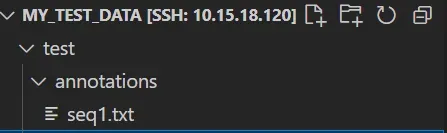
可以看出来, 这属于第二种模板. 同时, 我将跟踪结果放在当前目录./result/seq1.txt下.
为此, 我设置template2.yaml:
gt_structure_config:
data_root: '/data/datasets/my_test_data/'
has_split: True
train_or_test: test
train_folder_name: train
test_folder_name: test
gt_folder_name: annotations
gt_txt_name: '{seq_name}.txt' # gt.txt, {seq_name}.txt, etc.
gt_loc_format: '{data_root}/{split_name}/{gt_folder_name}/{gt_txt_name}'
tracker_structure_config:
trackers_folder: './result'
has_split: False
split_name: ''
has_tracker_name: False
trackers_to_eval: # None for all
# other options
OUTPUT_FOLDER: './track_eval_output' # Where to save eval results (if None same as TRACKERS_FOLDER)
SEQ_INFO: # seq_name: seq_length
'seq1': 600
# CLASS configs
CLASSES_TO_EVAL:
- 'pedestrian'
- 'person_on_vehicle'
- 'car'
CLASS_NAME_TO_CLASS_ID:
'pedestrian': 1
'person_on_vehicle': 2
'car': 3
'bicycle': 4
'motorbike': 5
'non_mot_vehicle': 6
'static_person': 7
'distractor': 8
'occluder': 9
'occluder_on_ground': 10
'occluder_full': 11
'reflection': 12
'crowd': 13
VALID_CLASS:
'pedestrian': 1
'person_on_vehicle': 2
'car': 3
DISTRACTOR_CLASSES_NAMES:
- 'person_on_vehicle'
- 'static_person'
- 'distractor'
- 'reflection'
之后修改run_custom.sh:
template_type=2
python scripts/run_custom_dataset.py --config_path ./configs/template${template_type}.yaml
运行
bash run_custom.sh
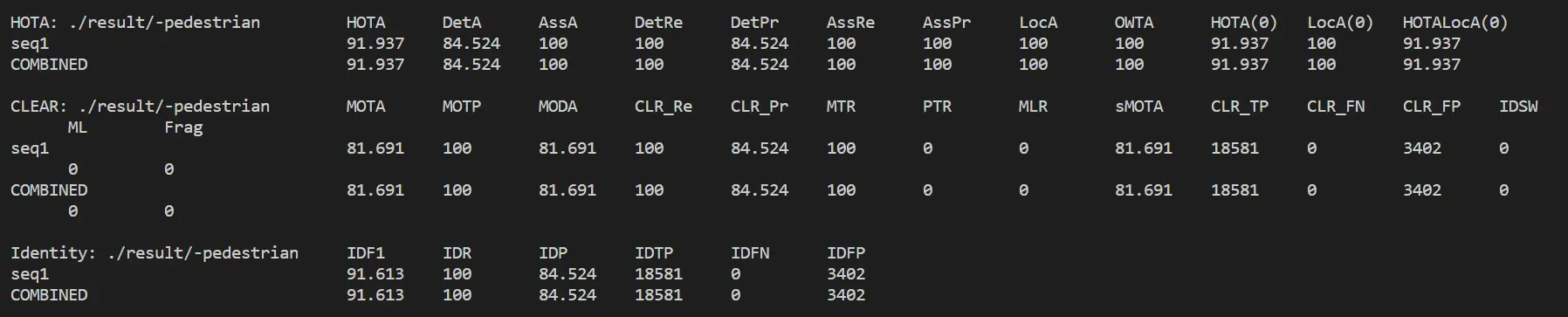
运行结果:
文章出处登录后可见!