1.KITTI数据集简介
KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。KITTI数据集的数据采集平台装配有2个灰度摄像机,2个彩色摄像机,一个Velodyne 64线3D激光雷达,4个光学镜头,以及1个GPS导航系统。下面给出kitti官方网址:
https://www.cvlibs.net/datasets/kitti/index.php
里面含有立体图像(stereo),光流(optical flow),视觉测距(visual odometry),3D物体检测(object detection)和3D跟踪(tracking)等计算机视觉技术在车载环境下的性能。

KITTI数据集包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中最多达15辆车和30个行人,还有各种程度的遮挡与截断。整个数据集由389对立体图像和光流图,39.2 km视觉测距序列以及超过200k 3D标注物体的图像组成,以10Hz的频率采样及同步。总体上看,原始数据集被分类为’Road’, ’City’, ’Residential’, ’Campus’ 和 ’Person’。
2.KITTI数据集选择和获取
lio-sam是激光雷达、IMU和里程计融合算法,如果我们需要自己制作kitti包,我们就需要下载其原始数据。即raw data(首页标题下倒数第二个)。
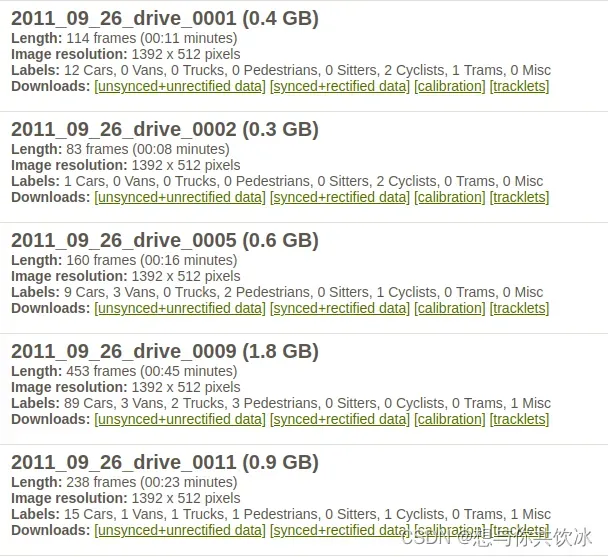
按照一般kitti转bag的方法,生成的bag包并不适合lio-sam。因为lio-sam对点云信息输入的格式有着严格的要求,正常的点云格式包含XYZI(intensity),但lio-sam还需要输入的点云每个点都有ring 信息和相对时间time信息,即XYZIRT信息。所以我们就需要下载比较大的数据,包含extracth和sync后缀的文件,以及标定文件,通过官网下方Downloads即可下载。
注:需要科学上网,嫌麻烦的同学,我会抽空上传我下载好的数据。想一步到位的同学,我也会上传我制作好的数据包bag,我会把05、07、09等等序列数据包上传至百度云。
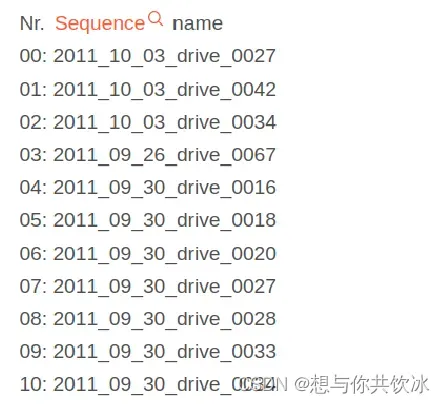
kitti原始数据和序列名对应的情况我下面放张图说明一下:
3.kitti数据集的制作
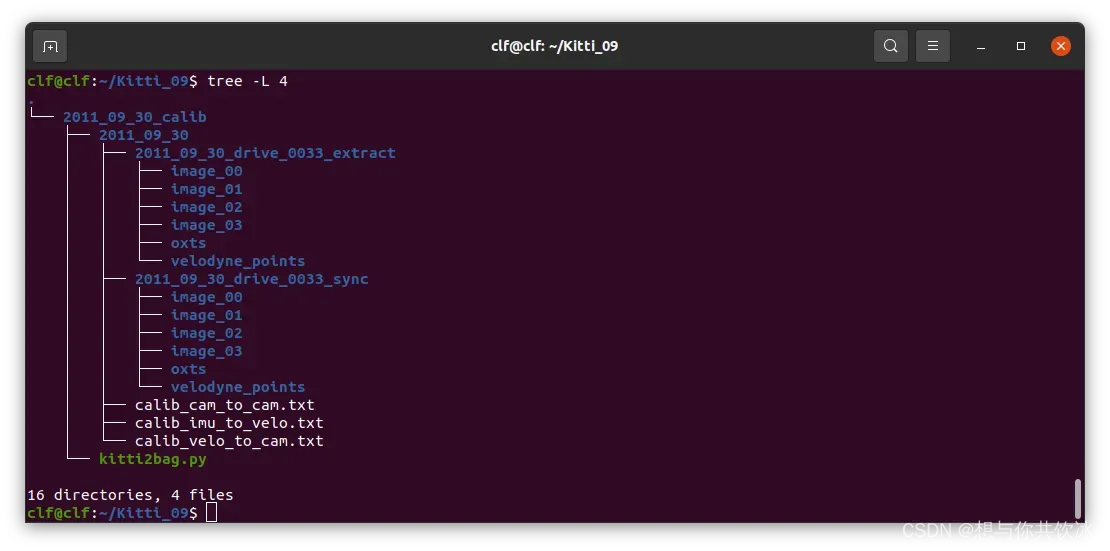
在网上下载好相应的原始数据(即下图中的extracth和sync后缀的文件,以及三个txt后缀的标定文件)后,再将kitti2bag.py文件放在2011_9_30同级目录下,即可完成数据的准备工作。
tips:kitti2bag.py文件在作者源码中提供了,路径如下:
LIO-SAM_based_relocalization-master/config/doc/kitti2bag
在制作数据集之前,可以下载一个进度条显示工具tqdm,方便观察制作数据集的工程,代码如下:
pip3 install tqdm
在一切准备就绪后,在python文件目录下启动终端,输入 :
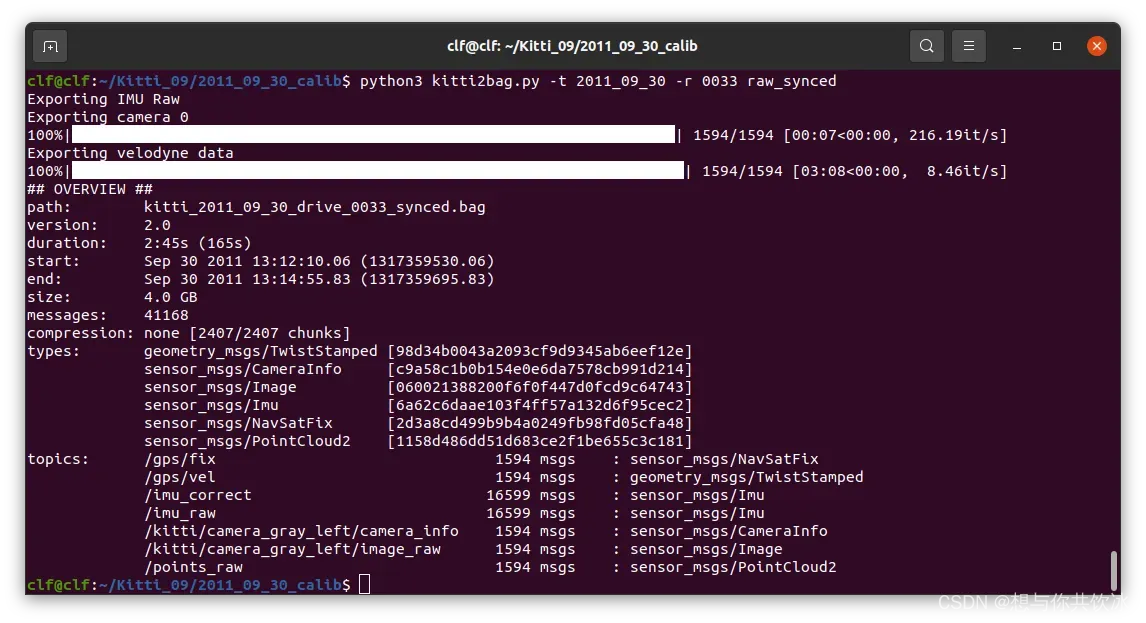
python3 kitti2bag.py -t 2011_09_30 -r 0033 raw_synced
终端结果如下图所示:
最终文件夹下结果如下:
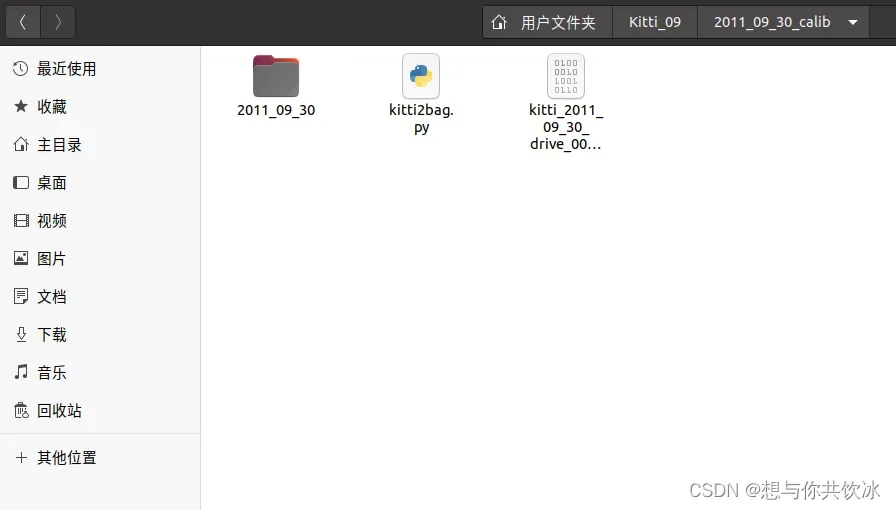
最右侧kitti_2011_09_30_drive_0033_synced.bag文件即我们制作好需要的lio-sam包~
4.制作好的kitti数据集:
我自己制作好的kitti数据集已经上传至百度网盘。
链接如下,提取码x8pi:
https://pan.baidu.com/s/1-3RHTaKYDaMsye1FbYVeZQ
文章出处登录后可见!