OpenCV实战(15)——轮廓检测详解
- 0. 前言
- 1. 提取区域轮廓
- 1.1 轮廓提取
- 1.2 复杂轮廓分析
- 2. 计算区域形状描述符
- 2.1 四边形检测
- 3. 完整代码
- 小结
- 系列链接
0. 前言
在计算机视觉领域,轮廓通常指图像中对象边界的一系列点。因此,轮廓通常描述了对象边界的关键信息,包含了有关对象形状的主要信息,该信息可用于形状分析与对象检测和识别。本节中,我们首先介绍如何提取图像中轮廓,然后讲解如何计算轮廓的形状描述符。
1. 提取区域轮廓
1.1 轮廓提取
图像通常包含目标对象的表示,图像分析的目标之一是识别和提取这些对象。在目标检测/识别应用中,通常需要生成一个二值图像,显示目标物体的位置,提取包含在二值图像中的对象。例如,使用如下二值图像:
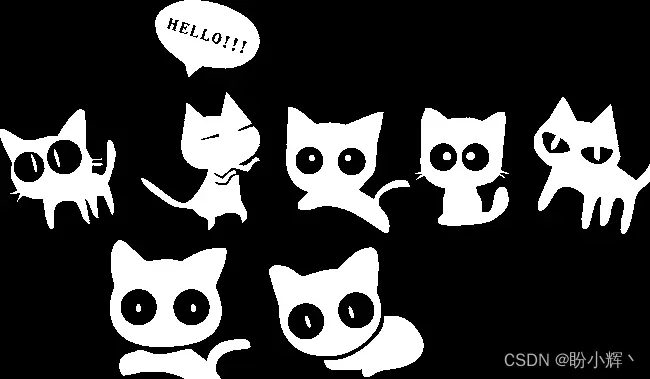
我们可以通过简单的阈值操作获得此图像,然后应用开/闭形态滤波器。本节将介绍如何提取图像中的目标对象,更具体地说,我们将提取图像中的连接部分,即由二值图像中的一组连接像素组成的形状。OpenCV 提供了一个简单的函数来提取图像的连接部分的轮廓,即 cv::findContours 函数。
(1) 要使用 cv::findContours 函数,我们需要一个点向量存储所有输出轮廓:
std::vector<std::vector<cv::Point> > contours;
(2) 使用 cv::findContours 函数检测图像的所有轮廓并将它们保存在轮廓向量中:
cv::findContours(image,
contours, // 轮廓向量
cv::RETR_EXTERNAL, // 检索外部轮廓
cv::CHAIN_APPROX_NONE); // 检索每个轮廓的所有像素
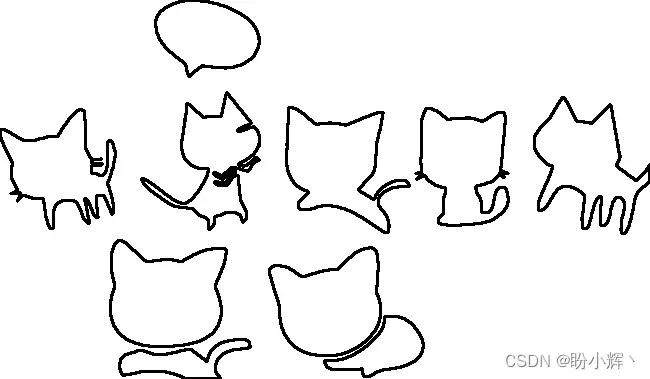
cv::findContours 函数的输入是二值图像,输出是一个轮廓向量,每个轮廓由一个 cv::Point 对象向量表示,因此输出参数定义为 std::vector 对象。此外,还指定了两个标志,第一个表示只需要外部轮廓,即忽略对象中的孔;第二个标志用于指定轮廓的格式,使用 CV_CHAIN_APPROX_NONE 选项,向量将列出轮廓中的所有点,使用 CV_CHAIN_APPROX_SIMPLE 标志,将仅包含水平、垂直或对角线轮廓的端点,也可以使用其他标志获取更复杂的轮廓链近似表示。使用上示图像,可以得到 10 个连通分量。
(3) 使用 OpenCV 可以非常方便地在一张图片上绘制出连接部分的轮廓:
cv::Mat result(image.size(), CV_8U, cv::Scalar(255));
cv::drawContours(result, contours,
-1, // 绘制所有轮廓
cv::Scalar(0), // 颜色
2); // 线宽为2
如果此函数的第 3 个参数为负值,则绘制所有轮廓,也可以使用正值指定要绘制的轮廓的索引,如下图所示:
轮廓是通过系统地扫描图像直到检测出所有的目标部分,从连接部分上的起点开始,沿着它的轮廓,在其边框上标记像素;完成标记后,在最后一个位置继续扫描,直到找到新的连接部分。
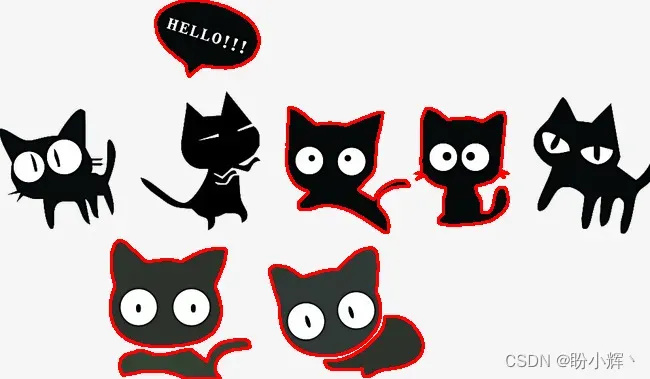
(4) 然后可以单独分析识别的连接部分。例如,我们可以通过预估目标对象的预期大小消除一些无效部分,可以使用连接部分周长的最小值和最大值消除无效连接:
// 消除所有过短或过长的轮廓
int cmin = 50;
int cmax = 500;
std::vector<std::vector<cv::Point> >::iterator itc = contours.begin();
while (itc!=contours.end()) {
if (itc!=contours.end()) {
if (itc->size()<cmin || itc->size()>cmax) {
itc = contours.erase(itc);
} else {
++itc;
}
}
}
由于 std::vector 中的每个消除操作的时间复杂度都是 ,因此该循环可以进一步进行优化。在原图上绘制轮廓,结果如下图所示:
1.2 复杂轮廓分析
使用简单的标准就能够帮助我们识别图像中所有感兴趣的对象,在更复杂情况下,我们需要对连接部分的属性进行更精细的分析。
使用 cv::findContours 函数,还可以通过在函数调用中指定 CV_RETR_LIST 标志检测二值图中所有闭合轮廓(包括对象中的孔形轮廓):
cv::findContours(image, contours, cv::RETR_LIST, cv::CHAIN_APPROX_NONE);
使用以上函数调用,可以得到以下轮廓:
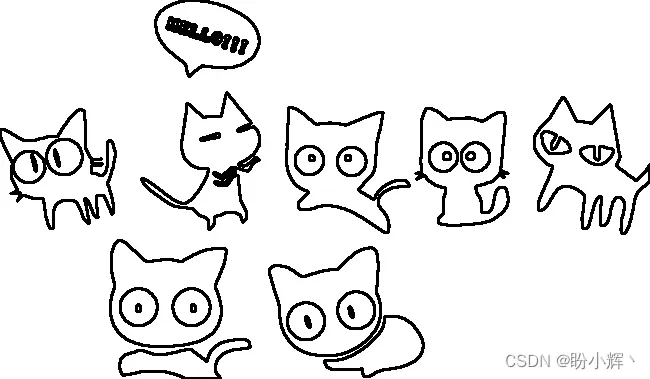
可以看到上图中增加了额外轮廓。也可以将这些轮廓组织成层次结构,主要部分是父组件,其中的孔是其子组件,如果这些孔内还有组件,它们将成为之前子组件的子组件,依此类推,该层次结构可以通过使用 CV_RETR_TREE 标志获得:
std::vector<cv::Vec4i> hierarchy;
cv::findContours(image,
contours, // 轮廓向量
hierarchy, // 分层表示
CV_RETR_TREE, // 使用树结构检索所有轮廓
CV_CHAIN_APPROX_NONE); // 每一轮廓的所有像素
在这种情况下,每个轮廓在相同的索引处都有一个对应的层次元素,由四个整数组成。前两个整数提供了同一级别的下一个和前一个轮廓的索引,后两个整数提供该轮廓的第一个子项和父项的索引,负索引表示轮廓列表的结尾。CV_RETR_CCOMP 标志类似,但层次结构仅包括两个级别。
2. 计算区域形状描述符
连接部分通常对应于图片场景的中某个目标对象,为了识别此对象,或将其与其他图像元素进行比较,我们可能需要进行测量以提取所需特征。在本节中,我们介绍 OpenCV 中可用的形状描述符,用于描述轮廓形状。
有多个 OpenCV 函数可用作形状描述符,应用这些函数可以提取连接部分。我们使用目标对象相对应的轮廓向量,计算轮廓上( contours[0] 到 contours[3] )的形状描述符并在轮廓图像(线宽为 1 )上绘制结果(线宽为 2)。
(1) boundingRect 函数用于计算矩形边框:
// 矩形
cv::Rect r0 = cv::boundingRect(contours[0]);
cv::rectangle(result, r0, 0, 2);
(2) minEnclosingCircle 函数用于近似最小包围圆:
// 圆形
float radius;
cv::Point2f center;
cv::minEnclosingCircle(contours[1], center, radius);
cv::circle(result, center, static_cast<int>(radius), 0, 2);
(3) 区域轮廓的多边形近似使用 approxPolyDP 函数:
// 近似多边形
std::vector<cv::Point> poly;
cv::approxPolyDP(contours[2], poly, 5, true);
cv::polylines(result, poly, true, 0, 2);
std::cout << "Polygon size: " << poly.size() << std::endl;
多边形绘制函数 cv::polylines 与其他绘图函数类似,第 3 个参数为布尔类型用于指示轮廓是否闭合,如果为true,则将最后一个点连接到第一个点。
(4) 凸包函数 convexHull 是多边形近似的另一种形式:
// 凸包
std::vector<cv::Point> hull;
cv::convexHull(contours[3], hull);
cv::polylines(result, hull, true, 0, 2);
(5) 矩是另一个强大的描述符,可以计算区域内的质心:
// 矩
itc = contours.begin();
while (itc!=contours.end()) {
cv::Moments mom = cv::moments(*itc++);
cv::circle(result,
cv::Point(mom.m10/mom.m00, mom.m01/mom.m00),
2, cv::Scalar(0), 2);
}
结果图像如下:
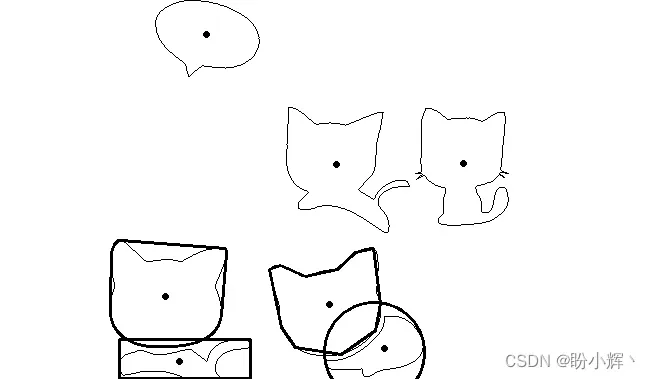
边界框大多数情况下是表示和定位图像中目标对象的最紧凑的方式,其定义为完全包含对象形状的最小尺寸的矩形。边界框的高度和宽度可以指示对象的垂直或水平尺寸,例如,可以使用高宽比来区分汽车和行人;当只需要目标的近似尺寸和位置时,通常使用最小包围圆。
当想要与目标对象形状相似的紧凑的表示时,可以采用多边形近似,通过指定精度参数( cv::approxPolyDP 函数中的第 4 个参数)指定目标对象形状与近似多边形之间的最大可接受距离,函数返回的 cv::Point 的向量对应于多边形的顶点。为了绘制这个多边形,我们需要遍历向量并在它们之间线段将相邻点连接起来。
形状的凸包或凸包络是包含形状的最小凸多边形,可以将其想象为弹性皮筋围在目标对象周围时的形状,凸包轮廓将在对象形状轮廓的凹面位置偏离原始轮廓,这些位置通常称为凸面缺陷,并且可以使用 OpenCV 函数 cv::convexityDefects 识别这些缺陷,调用方式如下所示:
std::vector<cv::Vec4i> defects;
cv::convexityDefects(contours[3], hull, defects);
contour 和 hull 参数分别是原始轮廓和凸包轮廓(均为 std::vector<cv::Point> 实例)。输出是由四个整数元素组成的向量,前两个整数是轮廓上的点索引,用于界定缺陷;第三个整数对应凹面内最远的点,最后一个整数对应这个最远点到凸包的距离。
矩是形状结构分析中常用的数学工具,OpenCV 定义了一个封装了形状所有计算矩的数据结构,cv::moments 函数的返回值就使用这种数据结构,这些矩构成了对物体形状的简洁描述。我们可以使用这个结构中前3个空间矩来获得形状的质心。
也可以使用 OpenCV 函数计算结构属性,cv::minAreaRect 函数计算最小的封闭旋转矩形;cv::contourArea 函数估计轮廓(内部像素数)的面积;cv::pointPolygonTest 函数用于确定一个点是在轮廓内部还是外部,而 cv::matchShapes 可以测量两个轮廓之间的相似性。我们可以通过组合所有这些属性进行更高级的图像结构分析。
2.1 四边形检测
我们可以利用形态学操作转换后获得的图像提取图像形状,假设,我们使用形态学操作转换图像获得的 MSER 结果,然后构建算法检测图像中的四边形分量。假设我们检测以下使用 MSER 算法得到的二值图像,检测四边形分量能够帮助我们识别建筑物上的窗户等,为了减少图像中的噪音,我们使用了一些形态滤波器对图像进行预处理:
// 创建二值图像
components = components==255;
// 图像开操作
cv::morphologyEx(components, components, cv::MORPH_OPEN, cv::Mat(), cv::Point(-1, -1), 3);
接下来,获取轮廓:
// 反转图像
cv::Mat componentsInv = 255 - components;
// 获取轮廓和连接部分
cv::findContours(componentsInv, contours, cv::RETR_LIST, cv::CHAIN_APPROX_NONE);
最后,遍历所有轮廓并用多边形近似:
cv::Mat quadri(components.size(), CV_8U, 255);
std::vector<std::vector<cv::Point> >::iterator it = contours.begin();
while (it!= contours.end()) {
poly.clear();
// 使用多边形近似轮廓
cv::approxPolyDP(*it,poly,5,true);
// 检测轮廓是否为四边形
if (poly.size()==4) {
cv::polylines(quadri, poly, true, 0, 2);
}
++it;
}
检测结果如下所示:
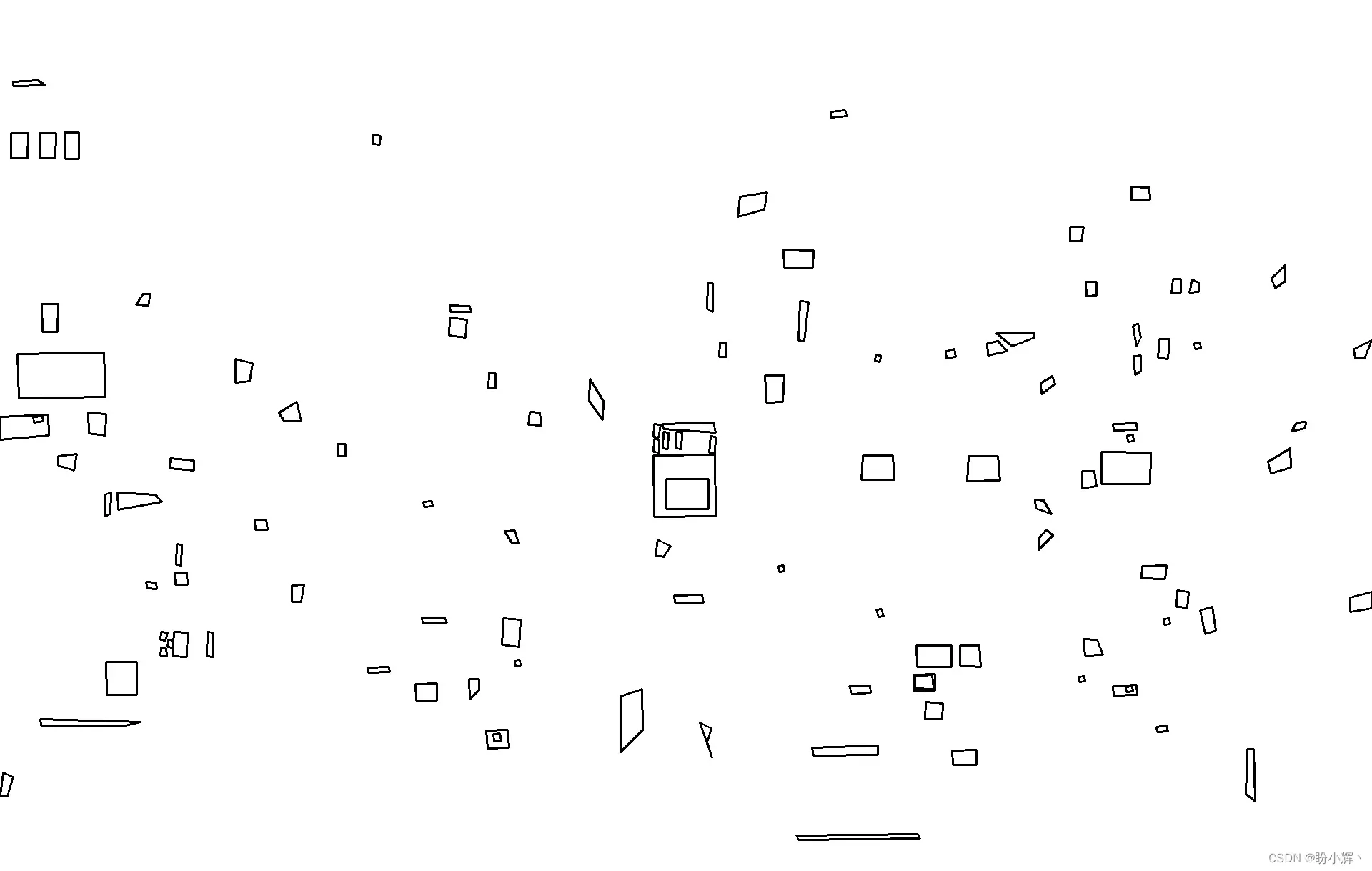
如果想要检测矩形,我们可以测量相邻边之间的角度并消除掉偏差过大(与 90 度相比)的四边形。
3. 完整代码
完整代码文件 blobs.cpp 如下所示:
#include <iostream>
#include <vector>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
int main() {
// 读取二进制图像
cv::Mat image = cv::imread("binary.png", 0);
if (!image.data) return 0;
cv::namedWindow("Binary Image");
cv::imshow("Binary Image", image);
// 获取轮廓和连接部分
std::vector<std::vector<cv::Point> > contours;
cv::findContours(image,
contours, // 轮廓向量
cv::RETR_EXTERNAL, // 检索外部轮廓
cv::CHAIN_APPROX_NONE); // 检索每个轮廓的所有像素
std::cout << "Contours: " << contours.size() << std::endl;
std::vector<std::vector<cv::Point> >::const_iterator itContours = contours.begin();
for (; itContours!=contours.end(); ++itContours) {
std::cout << "Size: " << itContours->size() << std::endl;
}
// 绘制轮廓
cv::Mat result(image.size(), CV_8U, cv::Scalar(255));
cv::drawContours(result, contours,
-1, // 绘制所有轮廓
cv::Scalar(0), // 颜色
2); // 线宽为2
cv::namedWindow("Contours");
cv::imshow("Contours", result);
// 消除所有过短或过长的轮廓
int cmin = 50;
int cmax = 500;
std::vector<std::vector<cv::Point> >::iterator itc = contours.begin();
while (itc!=contours.end()) {
if (itc!=contours.end()) {
if (itc->size()<cmin || itc->size()>cmax) {
itc = contours.erase(itc);
} else {
++itc;
}
}
}
// 绘制轮廓
cv::Mat original = cv::imread("2.png");
cv::drawContours(original, contours, -1, cv::Scalar(0, 0, 255), 2);
cv::namedWindow("Contours on Animals");
cv::imshow("Contours on Animals",original);
result.setTo(cv::Scalar(255));
cv::drawContours(result, contours, -1, 0, 1);
image = cv::imread("binary.png", 0);
// 矩形
cv::Rect r0 = cv::boundingRect(contours[0]);
cv::rectangle(result, r0, 0, 2);
// 圆形
float radius;
cv::Point2f center;
cv::minEnclosingCircle(contours[1], center, radius);
cv::circle(result, center, static_cast<int>(radius), 0, 2);
// 近似多边形
std::vector<cv::Point> poly;
cv::approxPolyDP(contours[2], poly, 5, true);
cv::polylines(result, poly, true, 0, 2);
std::cout << "Polygon size: " << poly.size() << std::endl;
// 凸包
std::vector<cv::Point> hull;
cv::convexHull(contours[3], hull);
cv::polylines(result, hull, true, 0, 2);
// std::vector<cv::Vec4i> defects;
// cv::convexityDefects(contours[3], hull, defects);
// 矩
itc = contours.begin();
while (itc!=contours.end()) {
cv::Moments mom = cv::moments(*itc++);
cv::circle(result,
cv::Point(mom.m10/mom.m00, mom.m01/mom.m00),
2, cv::Scalar(0), 2);
}
cv::namedWindow("Some Shape descriptors");
cv::imshow("Some Shape descriptors", result);
image = cv::imread("binary.png", 0);
cv::findContours(image, contours, cv::RETR_LIST, cv::CHAIN_APPROX_NONE);
result.setTo(255);
cv::drawContours(result, contours, -1, 0, 2);
cv::namedWindow("All Contours");
cv::imshow("All Contours", result);
// MSER 图像
cv::Mat components;
components = cv::imread("mser.png",0);
// 创建二值图像
components = components==255;
// 图像开操作
cv::morphologyEx(components, components, cv::MORPH_OPEN, cv::Mat(), cv::Point(-1, -1), 3);
cv::namedWindow("MSER image");
cv::imshow("MSER image", components);
contours.clear();
// 反转图像
cv::Mat componentsInv = 255 - components;
// 获取轮廓和连接部分
cv::findContours(componentsInv, contours, cv::RETR_LIST, cv::CHAIN_APPROX_NONE);
cv::Mat quadri(components.size(), CV_8U, 255);
std::vector<std::vector<cv::Point> >::iterator it = contours.begin();
while (it!= contours.end()) {
poly.clear();
// 使用多边形近似轮廓
cv::approxPolyDP(*it,poly,5,true);
// 检测轮廓是否为四边形
if (poly.size()==4) {
cv::polylines(quadri, poly, true, 0, 2);
}
++it;
}
cv::namedWindow("MSER quadrilateral");
cv::imshow("MSER quadrilateral", quadri);
cv::waitKey();
return 0;
}
小结
在本文中,首先介绍了轮廓的相关概念,然后了解利用 cv::findContours() 检测轮廓、cv::drawContours() 绘制轮廓,在获取轮廓后,我们可以计算轮廓的形状描述符。
系列链接
OpenCV实战(1)——OpenCV与图像处理基础
OpenCV实战(2)——OpenCV核心数据结构
OpenCV实战(3)——图像感兴趣区域
OpenCV实战(4)——像素操作
OpenCV实战(5)——图像运算详解
OpenCV实战(6)——OpenCV策略设计模式
OpenCV实战(7)——OpenCV色彩空间转换
OpenCV实战(8)——直方图详解
OpenCV实战(9)——基于反向投影直方图检测图像内容
OpenCV实战(10)——积分图像详解
OpenCV实战(11)——形态学变换详解
OpenCV实战(12)——图像滤波详解
OpenCV实战(13)——高通滤波器及其应用
OpenCV实战(14)——图像线条提取
文章出处登录后可见!