文章目录
- YOLOV5 + 双目相机实现三维测距
- 1. 项目流程
- 2. 测距原理
- 3. 代码部分解析
- 4. 实验结果
YOLOV5 + 双目相机实现三维测距
1. zed + yolov7 实现双目测距
2. zed+yolov4实现双目测距(直接调用,免标定)
3. zed+yolov5实现双目测距(直接调用,免标定)
4. 本文具体实现效果已在哔哩哔哩发布,点击跳转(欢迎投币点赞)
5. 如果有用zed相机的,可以参考我上边的两边文章👆👆👆直接调用内部相机参数,精度比双目测距好很多
下载链接1: https://download.csdn.net/download/qq_45077760/87233955 (CSDN)
下载链接2:https://github.com/up-up-up-up/yolov5_ceju (github)
注:我所做的是在10m以内的检测,没计算过具体误差,当然标定误差越小精度会好一点,其次注意光线、亮度等影响因素,当然检测范围效果跟相机的好坏也有很大关系
在三维测距基础上做了三维跟踪,详见 YOLOv5+双目实现三维跟踪(python) 和 YOLOv7+双目实现三维跟踪(python)
1. 项目流程
大致流程: 双目标定→双目校正→立体匹配→结合yolov5→深度测距
- 找到目标识别源代码中输出物体坐标框的代码段。
- 找到双目测距代码中计算物体深度的代码段。
- 将步骤2与步骤1结合,计算得到目标框中物体的深度。
- 找到目标识别网络中显示障碍物种类的代码段,将深度值添加到里面,进行显示
2. 测距原理
如果想了解双目测距原理,请移步该文章 双目三维测距(python)
3. 代码部分解析
双目相机参数stereoconfig.py
双目相机标定误差越小越好,我这里误差为0.1,尽量使误差在0.2以下
import numpy as np
# 双目相机参数
class stereoCamera(object):
def __init__(self):
self.cam_matrix_left = np.array([[1101.89299, 0, 1119.89634],
[0, 1100.75252, 636.75282],
[0, 0, 1]])
self.cam_matrix_right = np.array([[1091.11026, 0, 1117.16592],
[0, 1090.53772, 633.28256],
[0, 0, 1]])
self.distortion_l = np.array([[-0.08369, 0.05367, -0.00138, -0.0009, 0]])
self.distortion_r = np.array([[-0.09585, 0.07391, -0.00065, -0.00083, 0]])
self.R = np.array([[1.0000, -0.000603116945856524, 0.00377055351856816],
[0.000608108737333211, 1.0000, -0.00132288199083992],
[-0.00376975166958581, 0.00132516525298933, 1.0000]])
self.T = np.array([[-119.99423], [-0.22807], [0.18540]])
self.baseline = 119.99423
以下我stereo.py里的对图像进行处理的代码
这些都是网上现成的,直接套用就可以
class stereo_dd:
def __init__(self,imgl,imgr):
self.left = imgl
self.right = imgr
# 预处理
def preprocess(self, img1, img2):
# 彩色图->灰度图
if(img1.ndim == 3):#判断为三维数组
img1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY) # 通过OpenCV加载的图像通道顺序是BGR
if(img2.ndim == 3):
img2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
# 直方图均衡
img1 = cv2.equalizeHist(img1)
img2 = cv2.equalizeHist(img2)
return img1, img2
'''
# 消除畸变
def undistortion(self, image, camera_matrix, dist_coeff):
undistortion_image = cv2.undistort(image, camera_matrix, dist_coeff)
return undistortion_image
'''
# 消除畸变
def undistortion(self, imagleft,imagright, camera_matrix_left, camera_matrix_right, dist_coeff_left,dist_coeff_right):
undistortion_imagleft = cv2.undistort(imagleft, camera_matrix_left, dist_coeff_left )
undistortion_imagright = cv2.undistort(imagright, camera_matrix_right, dist_coeff_right)
return undistortion_imagleft, undistortion_imagright
# 畸变校正和立体校正
def rectifyImage(self, image1, image2, map1x, map1y, map2x, map2y):
rectifyed_img1 = cv2.remap(image1, map1x, map1y, cv2.INTER_AREA)
rectifyed_img2 = cv2.remap(image2, map2x, map2y, cv2.INTER_AREA)
return rectifyed_img1, rectifyed_img2
# 立体校正检验----画线
def draw_line(self, image1, image2):
# 建立输出图像
height = max(image1.shape[0], image2.shape[0])
width = image1.shape[1] + image2.shape[1]
output = np.zeros((height, width, 3), dtype=np.uint8)
output[0:image1.shape[0], 0:image1.shape[1]] = image1
output[0:image2.shape[0], image1.shape[1]:] = image2
# 绘制等间距平行线
line_interval = 50 # 直线间隔:50
for k in range(height // line_interval):
cv2.line(output, (0, line_interval * (k + 1)), (2 * width, line_interval * (k + 1)), (0, 255, 0), thickness=2, lineType=cv2.LINE_AA)
return output
# 视差计算
def stereoMatchSGBM(self, left_image, right_image, down_scale=False):
# SGBM匹配参数设置
if left_image.ndim == 2:
img_channels = 1
else:
img_channels = 3
blockSize = 3
paraml = {'minDisparity': 0,
'numDisparities': 128,
'blockSize': blockSize,
'P1': 8 * img_channels * blockSize ** 2,
'P2': 32 * img_channels * blockSize ** 2,
'disp12MaxDiff': -1,
'preFilterCap': 63,
'uniquenessRatio': 10,
'speckleWindowSize': 100,
'speckleRange': 1,
'mode': cv2.STEREO_SGBM_MODE_SGBM_3WAY
}
# 构建SGBM对象
left_matcher = cv2.StereoSGBM_create(**paraml)
paramr = paraml
paramr['minDisparity'] = -paraml['numDisparities']
right_matcher = cv2.StereoSGBM_create(**paramr)
# 计算视差图
size = (left_image.shape[1], left_image.shape[0])
if down_scale == False:
disparity_left = left_matcher.compute(left_image, right_image)
disparity_right = right_matcher.compute(right_image, left_image)
else:
left_image_down = cv2.pyrDown(left_image)
right_image_down = cv2.pyrDown(right_image)
factor = left_image.shape[1] / left_image_down.shape[1]
disparity_left_half = left_matcher.compute(left_image_down, right_image_down)
disparity_right_half = right_matcher.compute(right_image_down, left_image_down)
disparity_left = cv2.resize(disparity_left_half, size, interpolation=cv2.INTER_AREA)
disparity_right = cv2.resize(disparity_right_half, size, interpolation=cv2.INTER_AREA)
disparity_left = factor * disparity_left
disparity_right = factor * disparity_right
trueDisp_left = disparity_left.astype(np.float32) / 16.
trueDisp_right = disparity_right.astype(np.float32) / 16.
return trueDisp_left, trueDisp_right
测距代码部分解析
这一部分我直接计算了目标检测框中心点的深度值,把中心点的深度值当作了距离
你也可以写个循环,计算平均值或者中位数,把他们当作深度值
if (accel_frame % fps_set == 0):
t3 = time.time()
thread.join()
points_3d = thread.get_result()
t4 = time.time()
a = points_3d[int(y_0), int(x_0), 0] / 1000
b = points_3d[int(y_0), int(x_0), 1] / 1000
c = points_3d[int(y_0), int(x_0), 2] / 1000
dis = ((a**2+b**2+c**2)**0.5)
这里我加入了检测人与车之间的三维距离,分为了正常、中等、高风险三个距离等级
你也可以替换成人与人或者车与车等等
########## plot_one_box 系列 ###########
if (distance != 0): ## Add bbox to image
label = f'{names[int(cls)]} {conf:.2f} '
'''下边这几行如果不需要,可以改成
plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=3)
我是做了分类,是为了计算人与汽车之间的距离写的'''
if label is not None:
if (label.split())[0] == 'person':
people_coords.append(xyxy)
if (label.split())[0] == 'car' or (label.split())[0] =='truck':
car_coords.append(xyxy)
#plot_dots_on_car(xyxy, im0)
plot_one_box(xyxy, im0, label=label, color=colors[int(cls)],line_thickness=3)
########## annotator.box_label 系列 ###########
if names[int(cls)] == "person":
people_coords.append(xyxy)
c = int(cls) # integer class 整数类 1111111111
label = None if hide_labels else (
names[c] if hide_conf else f'{names[c]} {conf:.2f}') # 111
print("x:", point_cloud_value[0], "y:", point_cloud_value[1], "z:",
point_cloud_value[2], "dis:", distance, '', label)
# print("dis:", distance, "W:", wide)
txt = '{0} dis:{1} '.format(label, distance)
# annotator.box_label(xyxy, txt, color=(255, 0, 255))
annotator.box_label(xyxy, txt, color=colors(c, True))
if names[int(cls)] == "chair":
car_coords.append(xyxy)
c = int(cls) # integer class 整数类 1111111111
label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f}') # 111
print("x:", point_cloud_value[0], "y:", point_cloud_value[1], "z:",
point_cloud_value[2], "dis:", distance, '',label)
#print("dis:", distance, "W:", wide)
txt = '{0} dis:{1} '.format(label,distance)
#annotator.box_label(xyxy, txt, color=(255, 0, 255))
annotator.box_label(xyxy, txt, color = colors(c, True))
normal, intermediate, high = distancing(people_coords,car_coords, im0, intermediate, high,normal,dist_thres_lim=(2, 3))
主代码
加入了多线程处理,加快处理速度
import argparse
import time
from pathlib import Path
import threading
from threading import Thread
import cv2
import torch
import torch.backends.cudnn as cudnn
from numpy import random
import numpy as np
from utils.datasets import * ##1111111111
#from utils.utils import * # 111111111111
from PIL import Image, ImageDraw, ImageFont
from models.experimental import attempt_load
from utils.datasets import LoadStreams, LoadImages
from utils.general import check_img_size, check_requirements, check_imshow, non_max_suppression, apply_classifier, \
scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
from utils.plots import plot_one_box
from utils.torch_utils import select_device, load_classifier, time_synchronized
from stereo.dianyuntu_yolo import preprocess, undistortion, getRectifyTransform, draw_line, rectifyImage, \
stereoMatchSGBM # , hw3ToN3, view_cloud ,DepthColor2Cloud
from stereo import stereoconfig
from stereo.stereo import stereo_dd
from stereo.stereo import get_median, stereo_threading, MyThread
intermediate = 0
high = 0
normal = 0
people_label = " "
normal_label = " "
inter_label = " "
high_label = " "
def detect(save_img=False):
accel_frame = 0
source, weights, view_img, save_txt, imgsz = opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_size
webcam = source.isnumeric() or source.endswith('.txt') or source.lower().startswith(
('rtsp://', 'rtmp://', 'http://'))
# Initialize
set_logging()
device = select_device(opt.device)
half = device.type != 'cpu'
# Load model
model = attempt_load(weights, map_location=device)
stride = int(model.stride.max())
imgsz = check_img_size(imgsz,s=stride)
if half:
model.half()
# Second-stage classifier
classify = False
if classify:
modelc = load_classifier(name='resnet101', n=2)
modelc.load_state_dict(torch.load('weights/resnet101.pt', map_location=device)['model']).to(device).eval()
# Set Dataloader
vid_path, vid_writer = None, None
if webcam:
save_stream_dir = Path(
increment_path(Path("./runs/streams") / opt.name, exist_ok=opt.exist_ok))
(save_stream_dir / 'labels' if save_txt else save_stream_dir).mkdir(parents=True,
exist_ok=True)
flag = 0
view_img = check_imshow()
cudnn.benchmark = True
dataset = LoadStreams(source, img_size=imgsz, stride=stride)
# 获取视频信息,线程抓取图片dataset类中imgs[0]是0个摄像头的图片,LoadStreams是迭代类---》dataset是一个迭代器
else:
# Directories
save_dir = Path(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok))
(save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True)
save_img = True
dataset = LoadImages(source, img_size=imgsz,
stride=stride)
print("img_size:")
print(imgsz)
names = model.module.names if hasattr(model, 'module') else model.names
colors = [[random.randint(0, 255) for _ in range(3)] for _ in names]
################################ stereo #############################
if device.type != 'cpu':
model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
t0 = time.time() # 整个推理过程的开始计时
config = stereoconfig_040_2.stereoCamera()
# 立体校正
map1x, map1y, map2x, map2y, Q = getRectifyTransform(720, 1280, config)
# -----------------摄像头从此处开始反复循环-dataset为迭代器类--------------------------------
for path, img, im0s, vid_cap in dataset:
img = torch.from_numpy(img).to(device)
img = img.half() if half else img.float()
img /= 255.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
t1 = time_synchronized()
pred = model(img, augment=opt.augment)[0]
pred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, classes=opt.classes, agnostic=opt.agnostic_nms)
t2 = time_synchronized()
# Apply Classifier
if classify:
pred = apply_classifier(pred, modelc, img, im0s)
# List to store bounding coordinates of people 1111111
people_coords = [] # 1111111111
car_coords = []
# Process detections
for i, det in enumerate(pred):
if webcam:
p, s, im0, frame = path[i], '%g: ' % i, im0s[
i].copy(), dataset.count
else:
p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
fps_set = 10 # setting the frame
if (accel_frame % fps_set == 0):
thread = MyThread(stereo_threading,args=(config, im0, map1x, map1y, map2x, map2y, Q))
thread.start()
print(threading.active_count())
print(threading.enumerate())
print("############## Frame is %d !##################" % accel_frame)
p = Path(p)
if webcam:
save_stream_path = str(save_stream_dir / "stream0.mp4")
else:
save_path = str(save_dir / p.name)
txt_path = str(save_dir / 'labels' / p.stem) + (
'' if dataset.mode == 'image' else f'_{frame}')
s += '%gx%g ' % img.shape[2:]
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]]
if len(det):
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
for c in det[:, -1].unique():
n = (det[:, -1] == c).sum()
s += f"{n} {names[int(c)]} {'s' * (n > 1)} , "
for *xyxy, conf, cls in reversed(det):
if (0 < xyxy[2] < 1280):
if save_txt:
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist()
print("xywh x : %d, y : %d" % (xywh[0], xywh[1]))
line = (cls, *xywh, conf) if opt.save_conf else (cls, *xywh)
with open(txt_path + '.txt', 'a') as f:
f.write(('%g ' * len(line)).rstrip() % line + '\n')
if save_img or view_img:
x_center = (xyxy[0] + xyxy[2]) / 2
y_center = (xyxy[1] + xyxy[3]) / 2
x_0 = int(x_center)
y_0 = int(y_center)
if (0 < x_0 < 1280):
x1 = xyxy[0]
x2 = xyxy[2]
y1 = xyxy[1]
y2 = xyxy[3]
if (accel_frame % fps_set == 0):
t3 = time.time()
thread.join()
points_3d = thread.get_result()
t4 = time.time()
print(f'{s}Stereo Done. ({t4 - t3:.3f}s)')
a = points_3d[int(y_0), int(x_0), 0] / 1000
b = points_3d[int(y_0), int(x_0), 1] / 1000
c = points_3d[int(y_0), int(x_0), 2] / 1000
dis = ((a**2+b**2+c**2)**0.5)
distance = []
distance.append(dis)
if (distance != 0): ## Add bbox to image
label = f'{names[int(cls)]} {conf:.2f} '
'''下边这几行如果不需要,可以改成
plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=3)
我是做了分类,是为了计算人与汽车之间的距离写的'''
if label is not None:
if (label.split())[0] == 'person':
people_coords.append(xyxy)
if (label.split())[0] == 'car' or (label.split())[0] =='truck':
car_coords.append(xyxy)
#plot_dots_on_car(xyxy, im0)
plot_one_box(xyxy, im0, label=label, color=colors[int(cls)],line_thickness=3)
text_xy_0 = "*"
cv2.putText(im0, text_xy_0, (int(x_0), int(y_0)), cv2.FONT_ITALIC, 1.2,(0, 0, 255), 3)
print()
print('点 (%d, %d) 的 %s 距离左摄像头的相对距离为 %0.2f m' % (x_center, y_center, label, distance))
text_dis_avg = "dis:%0.2fm" % distance
# only put dis on frame
cv2.rectangle(im0, (int(x1 + (x2 - x1)), int(y1)),(int(x1 + (x2 - x1) + 5 + 210), int(y1 + 40)), colors[int(cls)],-1) # 画框存三维坐标
cv2.putText(im0, text_dis_avg, (int(x1 + (x2 - x1) + 5), int(y1 + 30)),cv2.FONT_ITALIC, 1.2, (255, 255, 255), 3)
'''同理,下边这一行如果不需要可以去除,我也是做行人与车辆之间距离用的'''
normal, intermediate, high = distancing(people_coords,car_coords, im0, intermediate, high,normal,dist_thres_lim=(2, 3))
t5 = time_synchronized() # stereo time end
print(f'{s}yolov5 Done. ({t2 - t1:.3f}s)')
if (accel_frame % fps_set == 0):
print(f'{s}yolov5+stereo Done. ({t5 - t1:.3f}s)')
if cv2.waitKey(1) & 0xFF == ord('q'):
if save_txt or save_img:
s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
if view_img:
s = save_stream_path
print(f"Results saved to {s}")
print(f'All Done. ({time.time() - t0:.3f}s)')
vid_writer.release()
exit()
# Stream results
if view_img:
if (dataset.mode == 'stream') & (flag == 0):
if isinstance(vid_writer, cv2.VideoWriter):
vid_writer.release() # release previous video writer
fourcc = 'mp4v' # output video codec
fps = 24 # vid_cap.get(cv2.CAP_PROP_FPS)
w = 2560 # int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = 720 # int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
print("save_stream_dir is %s" % save_stream_dir)
print("save_stream_path is %s" % save_stream_path)
vid_writer = cv2.VideoWriter(save_stream_path, cv2.VideoWriter_fourcc(*fourcc), fps, (w, h))
flag = 1
vid_writer.write(im0)
cv2.namedWindow("Webcam", cv2.WINDOW_NORMAL)
cv2.resizeWindow("Webcam", 1280, 480)
cv2.moveWindow("Webcam", 0, 100)
cv2.imshow("Webcam", im0)
cv2.waitKey(1)
# Save results
if save_img:
if dataset.mode == 'image':
cv2.imwrite(save_path, im0)
else:
if vid_path != save_path:
vid_path = save_path
if isinstance(vid_writer, cv2.VideoWriter):
vid_writer.release()
fourcc = 'mp4v'
fps = 24
w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*fourcc), fps, (w, h))
vid_writer.write(im0)
cv2.namedWindow("Video", cv2.WINDOW_NORMAL)
cv2.resizeWindow("Video", 1280, 480)
cv2.moveWindow("Video", 0, 0)
cv2.imshow("Video", im0)
cv2.waitKey(1)
print("frame %d is done!" % accel_frame)
accel_frame += 1
if save_txt or save_img:
s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
print(f"Results saved to {save_dir}{s}")
print(f'All Done. ({time.time() - t0:.3f}s)')
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--weights', nargs='+', type=str, default='./yolov5s.pt', help='model.pt path(s)')
parser.add_argument('--source', type=str, default='./data/video/test.mp4',help='source')
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--view-img', action='store_true', help='display results')
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 0 2 3')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--update', action='store_true', help='update all models')
parser.add_argument('--project', default='runs/detect', help='save results to project/name')
parser.add_argument('--name', default='exp', help='save results to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
opt = parser.parse_args()
print(opt)
check_requirements()
with torch.no_grad():
if opt.update:
for opt.weights in ['yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt']:
detect()
strip_optimizer(opt.weights)
else:
detect()
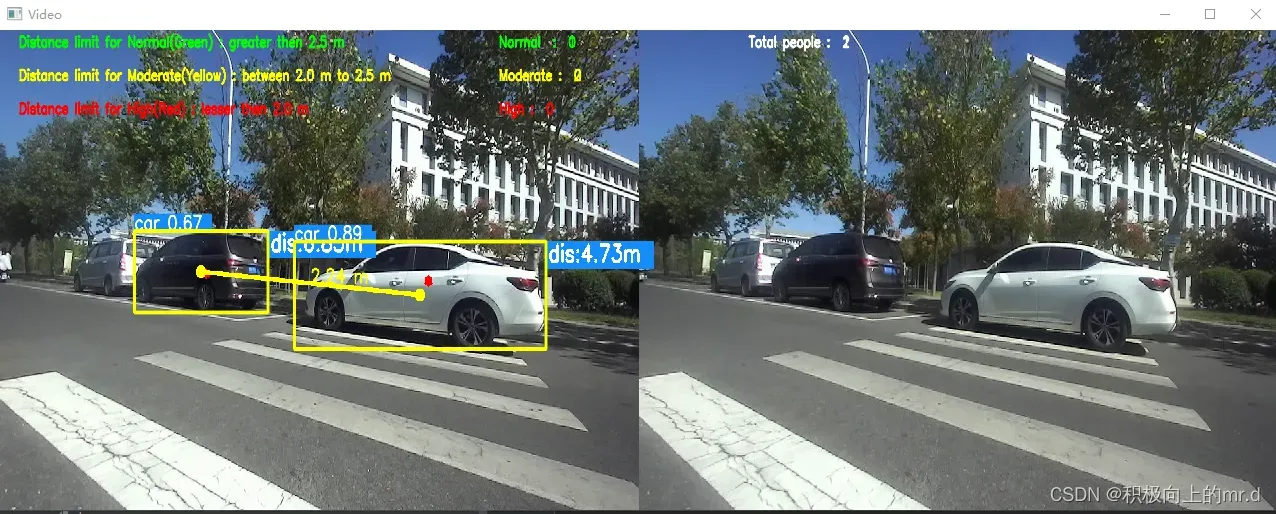
有点乱,后续会慢慢完善,下边是测距后的图,精度不是很高
4. 实验结果
单目标测距

多目标测距

目标之间三维距离检测计数
检测效果(视频展示)
文章内容后续会慢慢完善…
文章出处登录后可见!