内容
1. 引言
2. 数学推导
2.1 状态价值函数
2.2 策略梯度
2.3 蒙特卡罗近似
3. 算法
1. 引言
我们上次讲到了价值学习,这次我们来看看基于策略的学习,我们状态价值函数能够描述当前状态下局势的好坏,如果
越大那局势不就会越好吗,所以我们得到了策略学习的基本思想:找到最优的action使
达到最大。
2. 数学推导
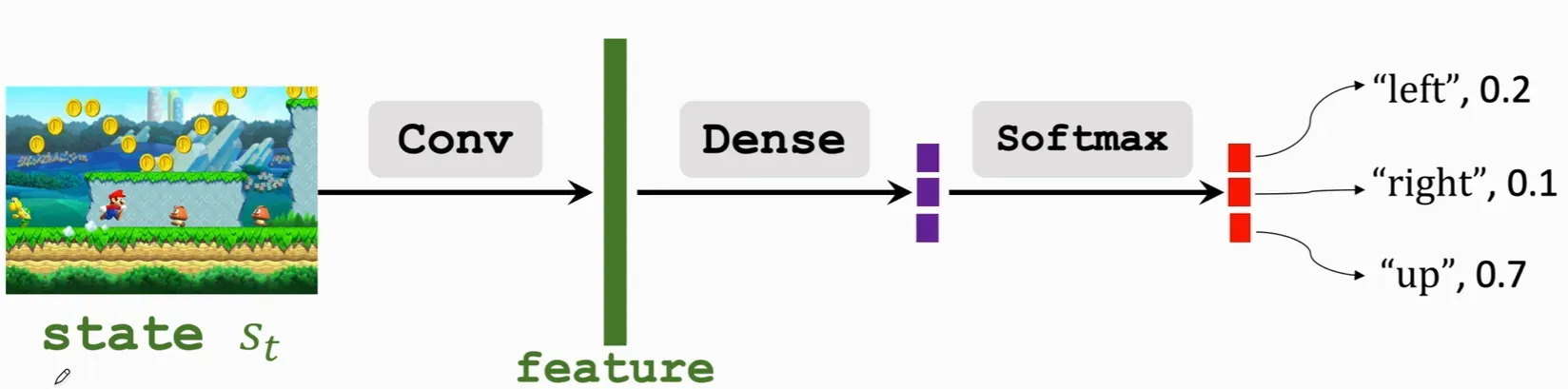
2.1 状态价值函数
我们之前知道状态值函数,我们先用神经网络
逼近
,其中
是神经网络的参数,如果我们认为
与
无关,那么
我们求策略梯度。
2.2 策略梯度
我们称为策略梯度。由于我们的目标是使
更大,我们使用梯度上升
来更新参数
,我们从以下公式得出:
第三个方程的修改是利用的性质使概率密度函数写成想要的形式
上面是action为离散情况下的表达形式,那么如果是连续情况呢?这就需要使用蒙特卡罗近似了。
2.3 蒙特卡罗近似
蒙特卡洛近似本质上是一种基于统计原理的近似方法,我们抽取多次动作,次数越多近似就越准确,这样将连续问题离散化,我们就仍可以使用上面的公式了,例如我从action中随机抽取了一个,我们便有
,这里的
我们称之为
的一个无偏估计。
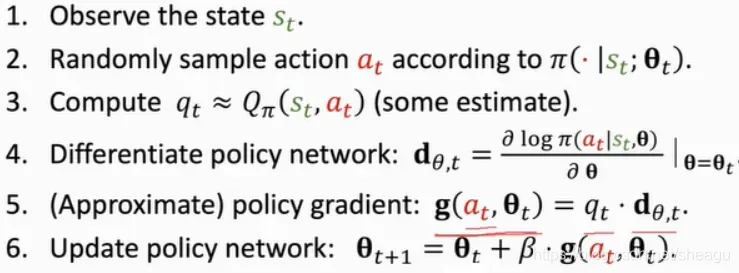
3. 算法
这里我们还有第三步没有解决:对进行估计,我们知道
是return的期望,所以我们可以用期望的计算公式
来近似
或者再用一个神经网络来拟合
文章出处登录后可见!
已经登录?立即刷新