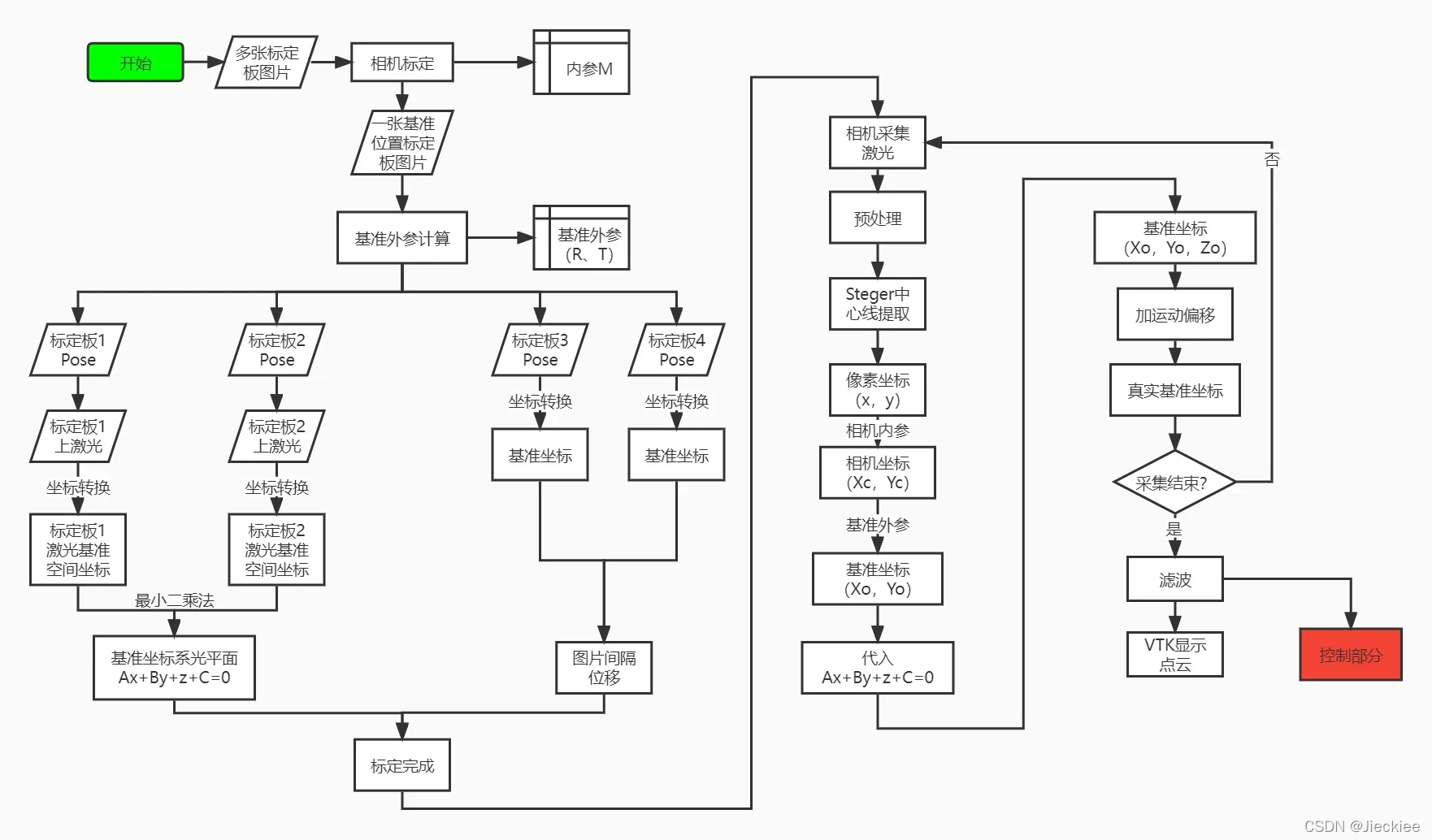
1.相机校准
Zhang Zhengyou calibration method
2、基准外参数的计算
通过OpenCV的solvePnp()函数计算出相机到基准坐标系的外参数Rb、tb
Pc= Rb( Pb- tb)
3.光学平面校准
通过两个不同位姿的标定板及其上的激光线,采用最小二乘法计算出光平面的公式。
Ax+By+z+C=0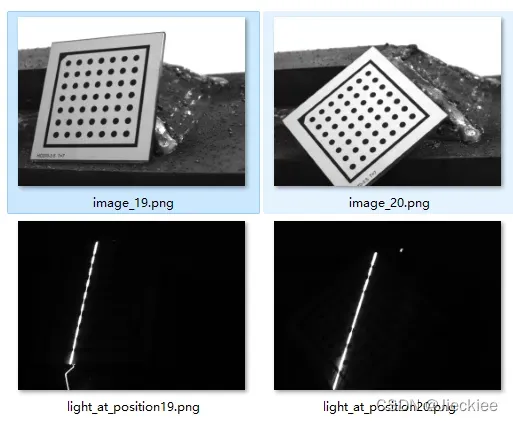
上面两张图是不同姿态的校准板,下面两张是关灯后照射在两块校准板上的激光线。
首先使用solvePnP计算出两张不同位姿的标定板的外参数R、t
Pc为相机坐标,Pw为标定板上的世界坐标。
Pc= R * ( Pw- t)
通过图片可以得到激光线的像素坐标,然后通过相机内参将像素坐标转换为相机坐标,再通过坐标转换为所属标定板上的世界坐标两个不同校准板的外部参数。部门去。
这个时候计算出的世界坐标z=0
接下来,将两个世界坐标统一到同一个坐标系中。
可以将这两个世界坐标系通过这两个标定板的外参数转换到相机坐标系下,再通过基准外参转换到基准坐标系中。这里z!=0了,这样就可以得到在同一个坐标系下的不平行的两条空间线的点集合了。
然后可以使用最小二乘法从这些点的集合中计算出光平面的方程。
最小二乘拟合平面
4.移动设备校准
通过两张不同时期拍摄的标定板图片,计算出移动设备拍摄的相邻两张图片在参考坐标系中的移动距离。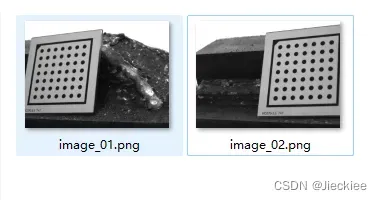
先分别计算两个标定板图像的外参,然后在标定板上选择一个点,将其坐标转换为参考坐标系(先用自己的外参转换为相机坐标,再用参考外参转换为参考坐标的参数 两点之间的距离通过坐标相减得到,然后除以图片拍摄间隔,得到移动设备在参考坐标系中单位间隔内的移动距离。
五、线激光坐标转换,计算深度
通过图片可以得到每条激光条纹的像素坐标,将他们转换到基准坐标系下(先使用内参转换到相机坐标,再使用基准外参转换到基准坐标系下),可以得到基准坐标系下的x、y
然后带入基准坐标系下的光平面方程Ax+By+z+C=0可以解出z
6.添加运动偏移
定义第一张图片偏移为0
那么第二张图片需要在计算出的参考坐标上加上运动偏移,得到真实的参考坐标
那么第三张图需要在计算出的基坐标上加上两个运动偏移量才能得到真正的基坐标
那么第四张图需要在计算出的基坐标上加上三个运动偏移量得到真正的基坐标
……………………………………
这样就得到了物体表面的点云。
文章出处登录后可见!