一、前期准备
1、安装好python3,可以在anaconda中安装python3。
2、一个合适的双目摄像头。
3、一台可以运行Matlab的电脑。
4、一张棋盘图(可A4打印,若效果不佳,则可A3打印)。
棋盘图如下图所示:需要测量小方框的边长(一般单位为毫米:mm)。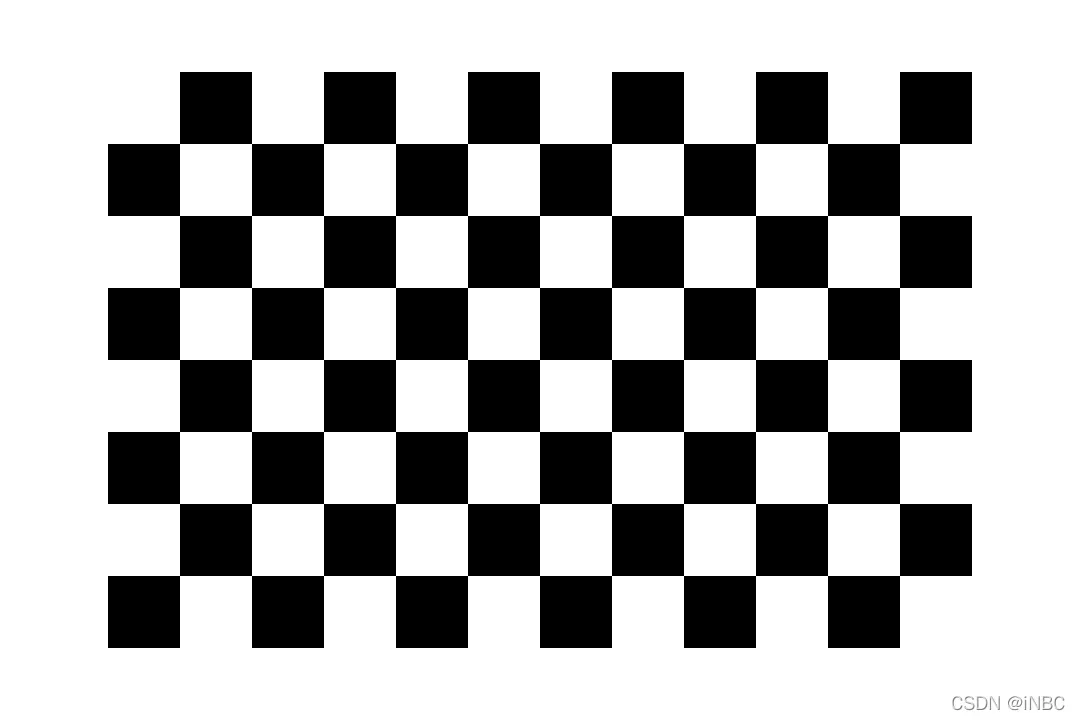
2.使用双目相机(左+右)拍摄棋盘
1、注意事项
注意:
1、左、右摄像头图像中必须包含单独的完整的棋盘图。
2、可适当前后、左右、上下翻转棋盘图,在符合上述条件1的情况下。
3、拍摄左右双目的照片40~50张比较合适。
如图所示: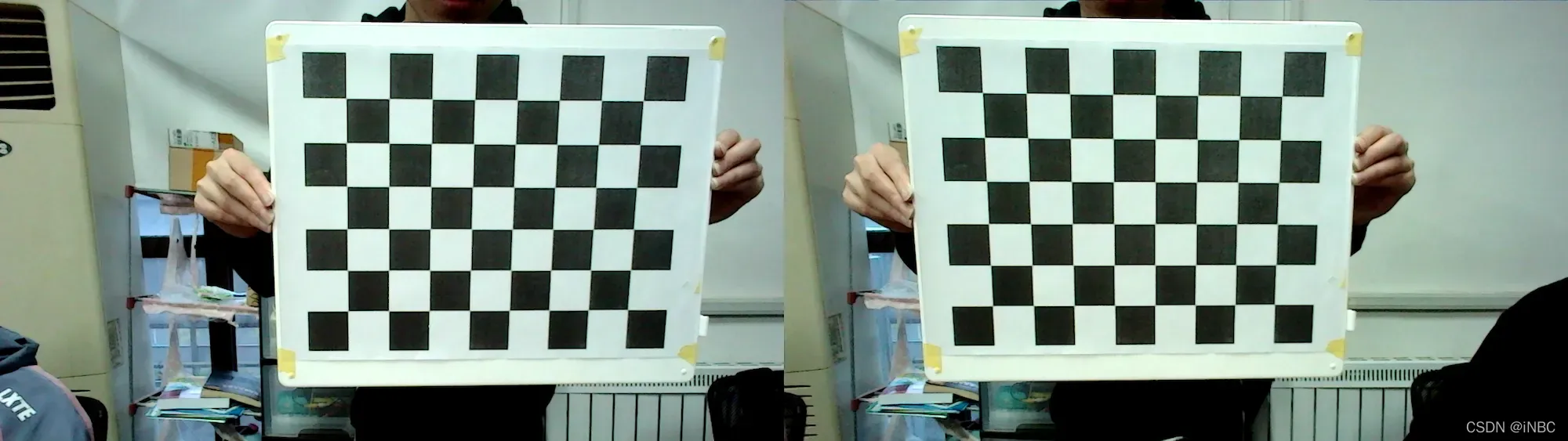
2、双目拍照代码(python)
take_photo.py内容如下:
import cv2
import sys
#引入库
cap = cv2.VideoCapture(1) #读取笔记本内置摄像头或者0号摄像头
i = 0
while True:
ret, frame = cap.read()
if (ret):
cv2.namedWindow("Video01",0) #创建一个名为Video01的窗口,0表示窗口大小可调
#cv2.resizeWindow("Video01",1280,720) ##创建一个名为Video01的窗口,设置窗口大小为 1920 * 1080 与上一个设置的 0 有冲突
cv2.imshow("Video01", frame)
#等待按键按下
c = cv2.waitKey(1) & 0xff
#r若按下w则保存一张照片
if c ==ord("w"):
cv2.imwrite("./val_001/%d.bmp" %i, frame) #自己设置拍摄的照片的存储位置
print("Save images %d succeed!" %i)
i+=1
#若按下Q键,则退出循环
if c == ord("q"):
break
#随时准备按q退出
cap.release()
#关掉所有窗口
cv2.destroyAllWindows()
注意:
1、运行take_photo.py前,注意设置左右照片的存储位置。
2、运行take_photo.py后,按下键盘上的“W”键拍摄一张照片。当拍摄的照片数量足够时,按下“Q”键退出程序运行。
3、程序退出后,打开存储照片的文件夹查看照片是否合适。
3、双目左右照片分割(python)
resize.py内容如下:
import numpy as np
import cv2
#img1 = cv2.imread(r"/Users/inbc/Desktop/zuo/Left1.bmp")
#img2 = cv2.imread(r"/Users/inbc/Desktop/you/Right1.bmp")
for i in range(0,7) :
#imgT = cv2.imdecode(np.fromfile('./images/%d.bmp' %i ,dtype=np.uint8), -1)
imgT = cv2.imdecode(np.fromfile('./val/%d.bmp' %i ,dtype=np.uint8), -1) #读取拍摄的左右双目照片
# cv2.imshow("zuo", img1[300:1200, 500:2000])
# cv2.imshow("you", img2[300:1200, 500:2000])
# cv2.waitKey(0)
#设置左右照片的存储位置
cv2.imwrite("./val/zuo/reLeft%d.bmp" %i ,imgT[0:720, 0:1280] )#imgL的第一个参数是图片高度像素范围,第二个参数是图片宽度的像素范围
cv2.imwrite("./val/you/reRight%d.bmp" %i ,imgT[0:720, 1280:2560] )
print("Resize images%d Fnished!" %i)
print("Fnished All!!!")
注意:
1、运行resize.py前,注意设置左、右照片的分别的存储位置。
2、运行resize.py后,终端打印"Fnished All!!!"表示分割完成。
3、程序退出后,打开存储照片的文件夹查看照片,是否分割完成,左摄像头照片存放在zuo,右摄像头照片存放在you。(文件名可自己更改)
三、Matlab双目参数标定
1、打开Matlab后,点开app,找到Stereo Camera Calibrator。如下图所示: 打开后如图所示:
打开后如图所示: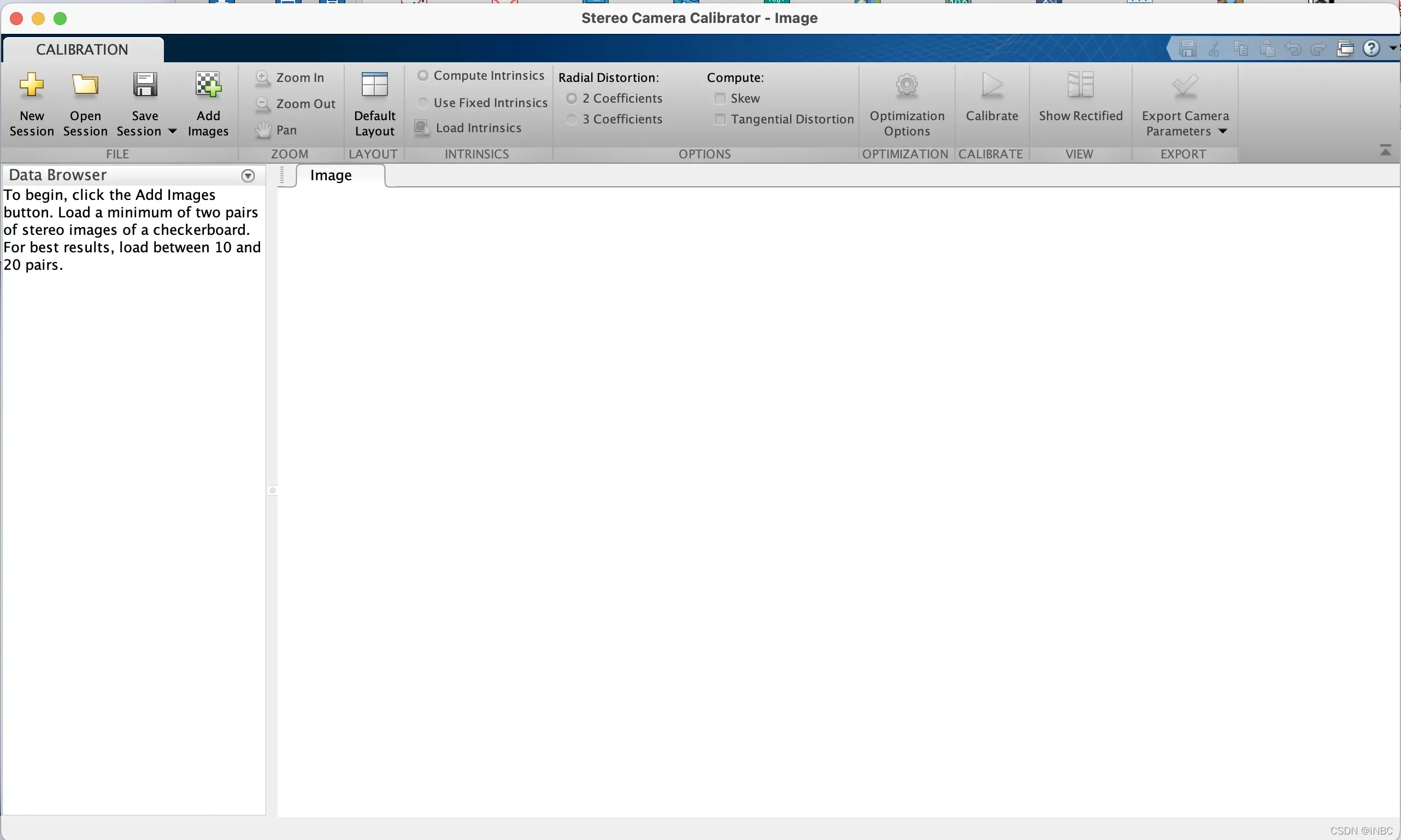
2、导入双目的左右照片到Stereo Camera CalibratorAPP。具体操作,如下图所示: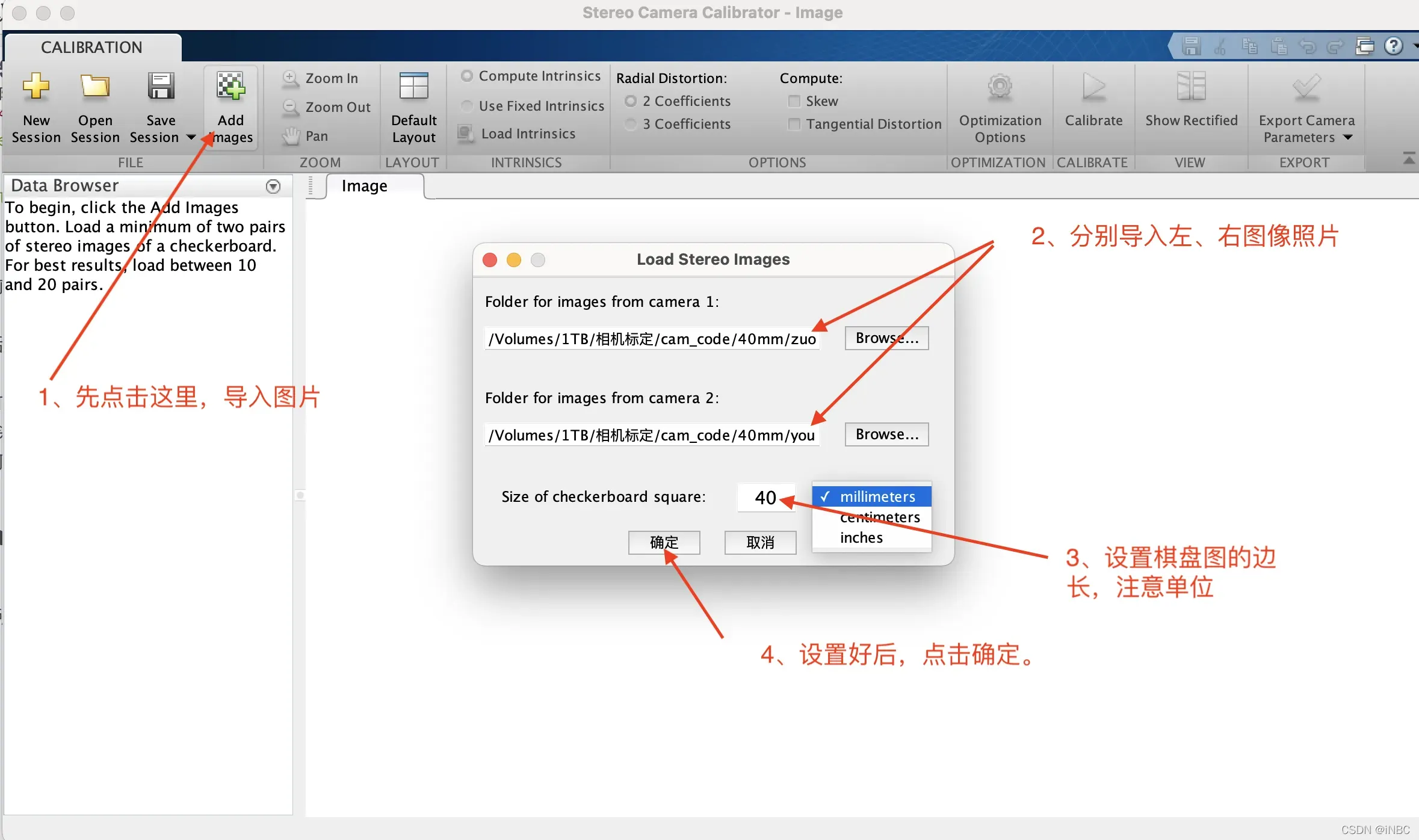
3、点击确认后就可以分析导入的左右的照片了。这个过程会自动剔除掉不合格(误差过大)的左右照片。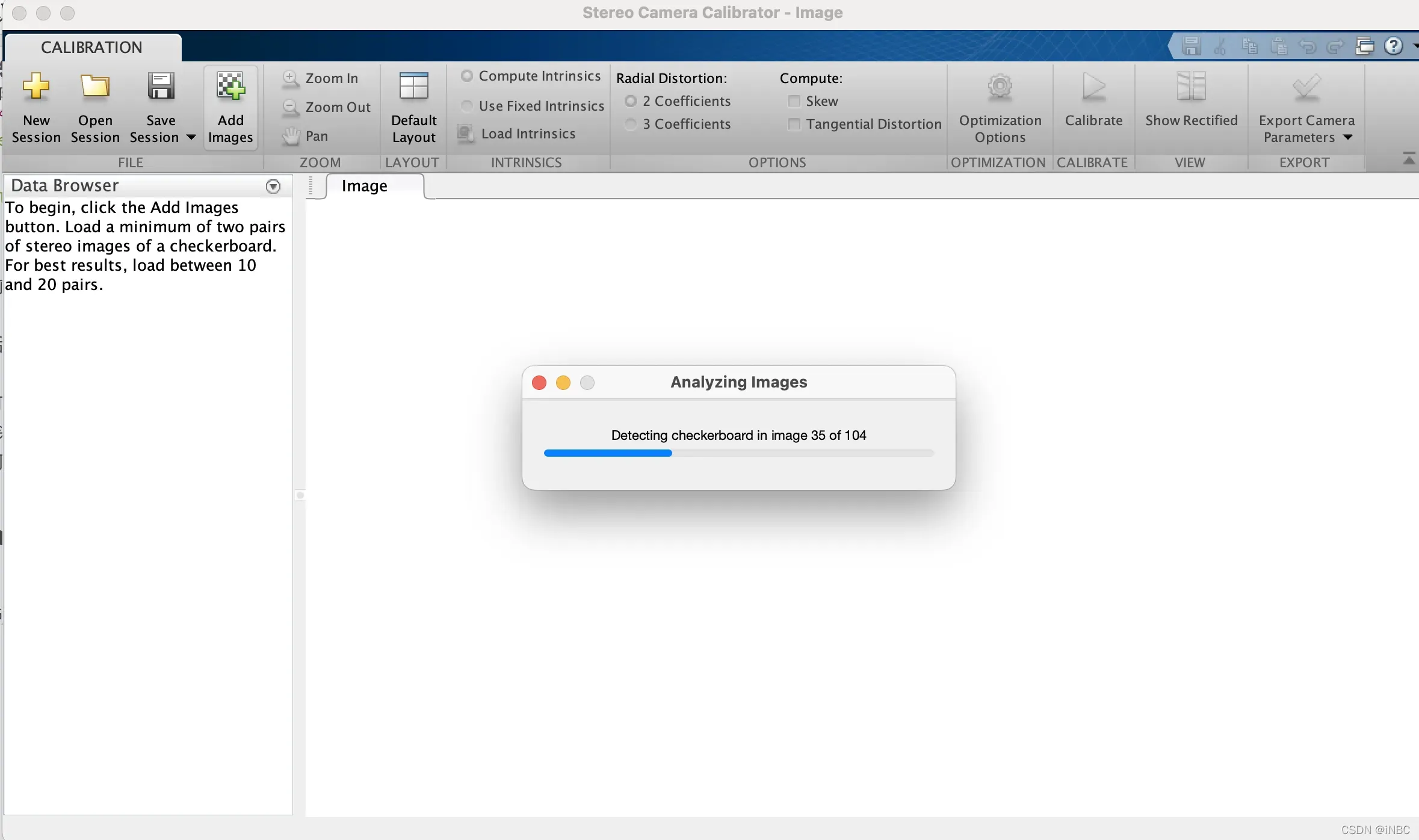
4、导入照片后就可以进行双目定标了。
导入左右照片后,如图: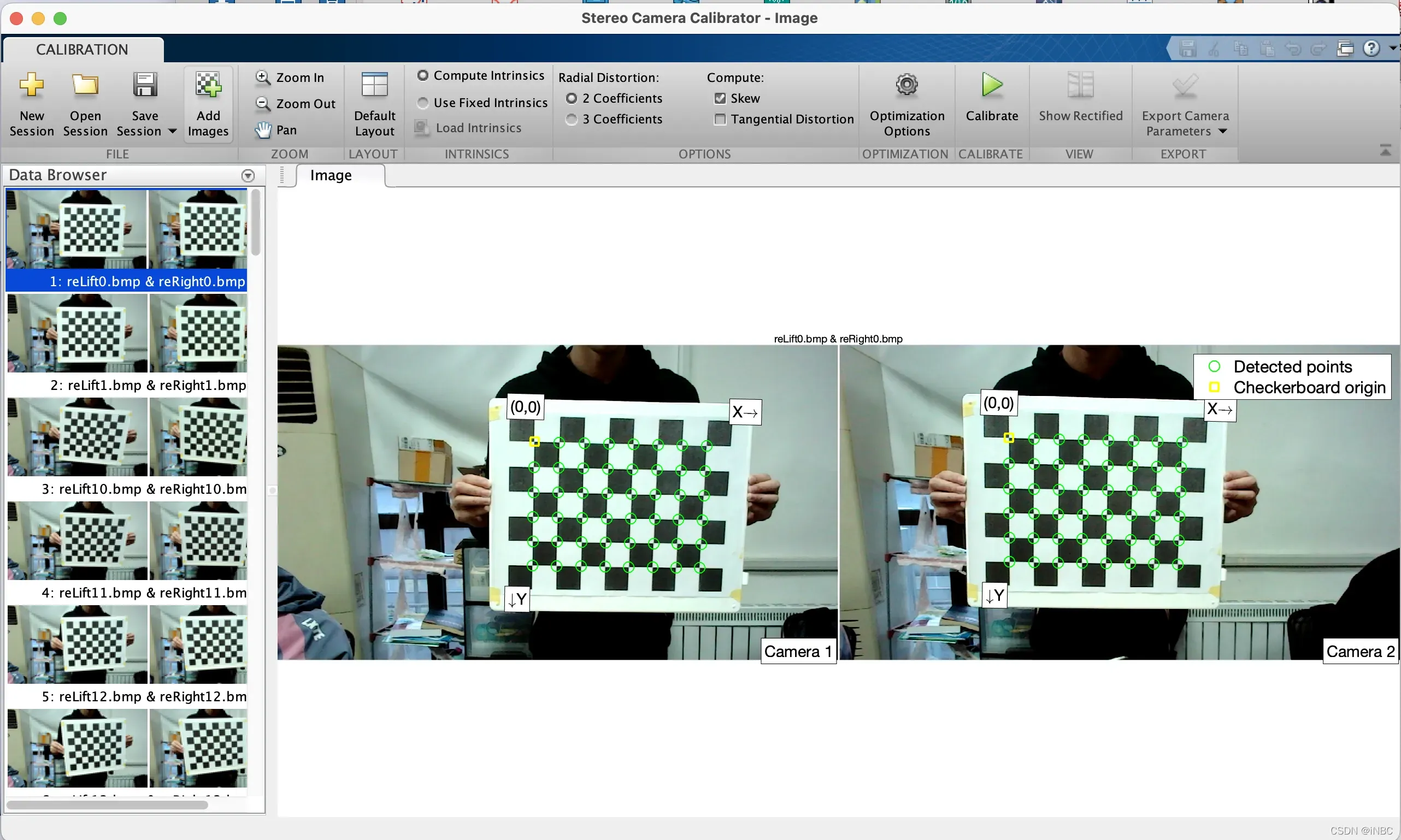
5、设置双目相机的定标参数,如图所示。
6、进行双目定标,并导出双目参数矩阵到Matlab中,进行下一步的处理。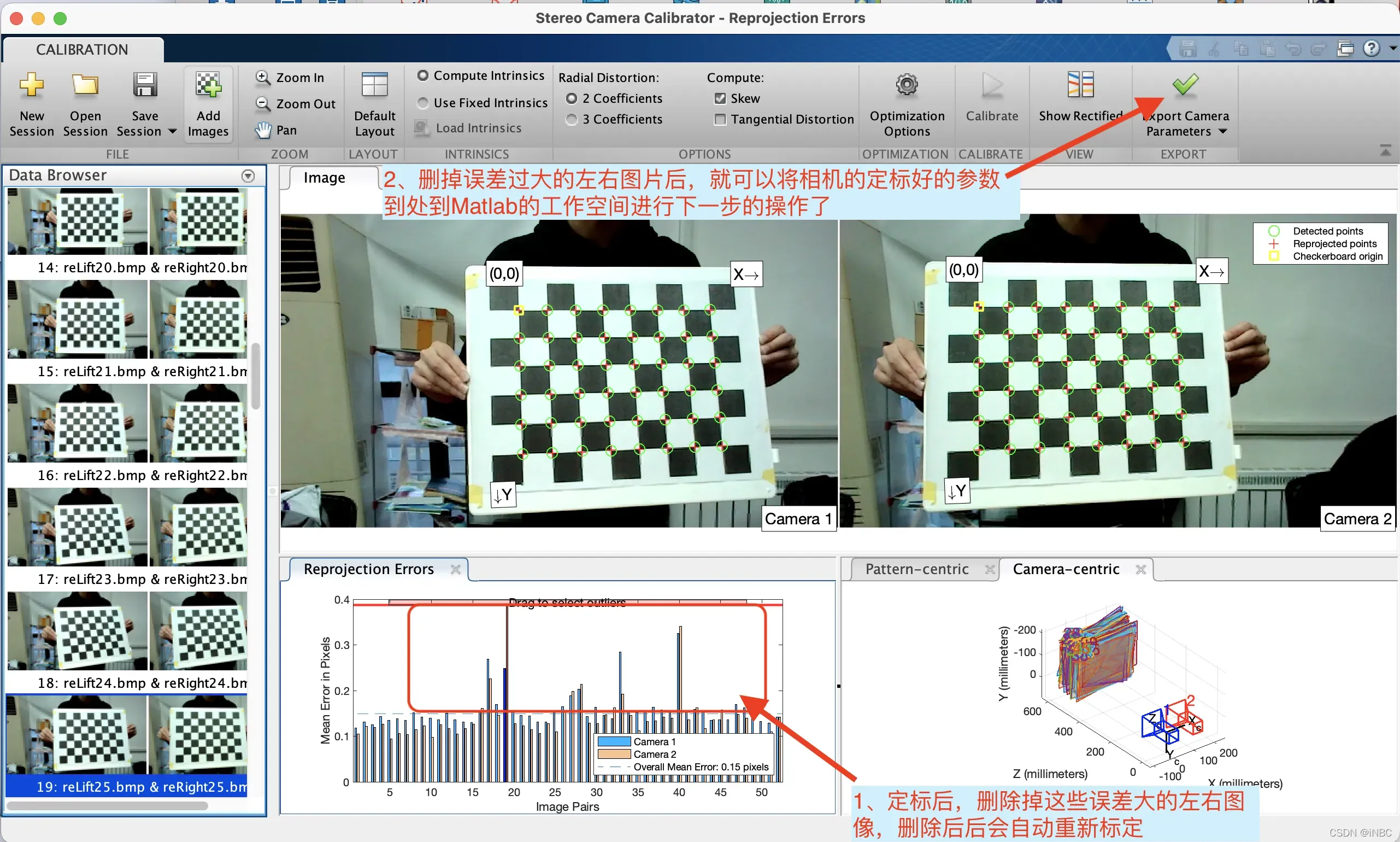
四、双目参数提取
1、左、右相机内参数获取,注意参数矩阵的转置:
>> stereoParams.CameraParameters1.IntrinsicMatrix'#左相机参数
ans =
831.0889 -4.0855 659.4243
0 831.8663 487.3259
0 0 1.0000
>> stereoParams.CameraParameters2.IntrinsicMatrix'#右相机参数
ans =
831.1982 -3.5773 632.5308
0 832.1221 479.3084
0 0 1.0000
Matlab如图所示: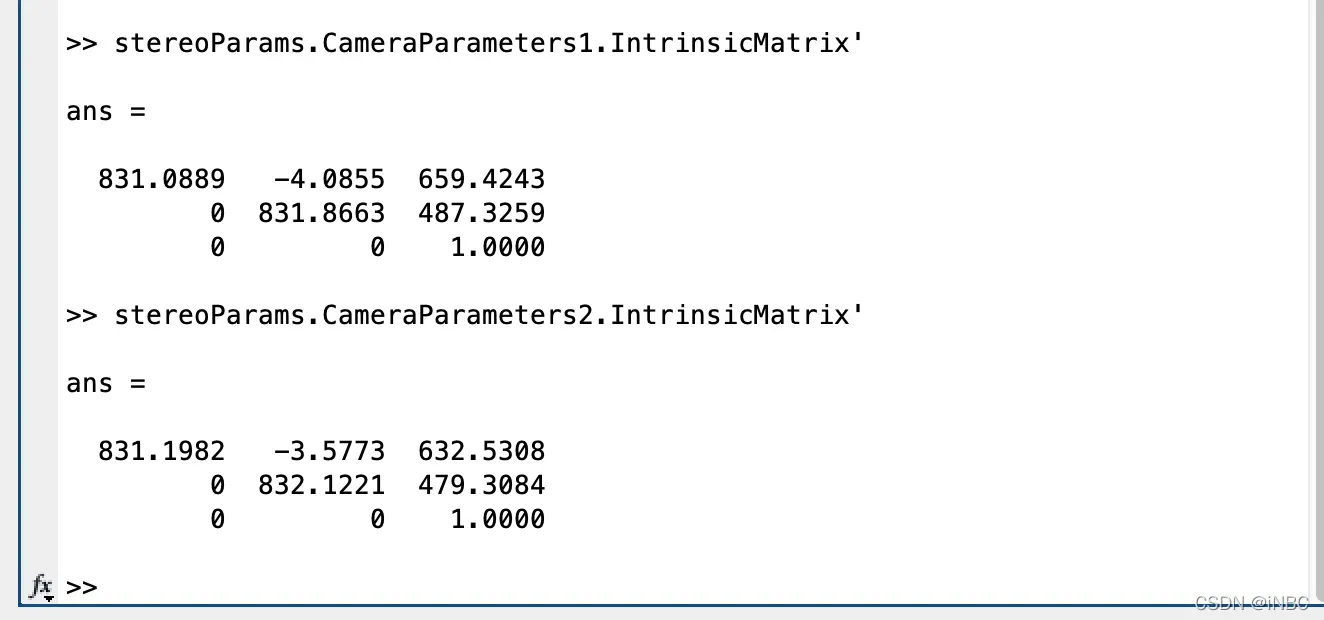
2、获取左右相机畸变系数。
注意: 左右相机畸变系数:[k1, k2, p1, p2, k3] ,顺序要正确。
# 左右相机畸变系数:[k1, k2, p1, p2, k3]
>> stereoParams.CameraParameters1.RadialDistortion
ans =
-0.0806 0.3806 -0.5229 #k1 k2 k3
>> stereoParams.CameraParameters1.TangentialDistortion
ans =
-0.0033 0.0005 #p1 p2
Matlab如图所示: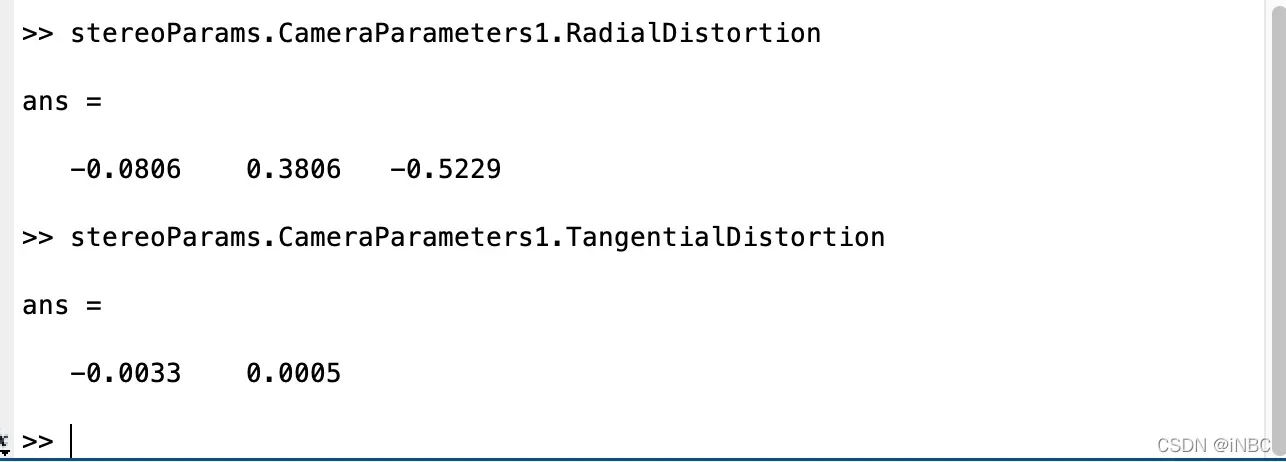
3、获取双目的旋转矩阵和平移矩阵,注意旋转矩阵的转置。
# 旋转矩阵
>> stereoParams.RotationOfCamera2'
ans =
1.0000 0.0017 -0.0093
-0.0018 1.0000 -0.0019
0.0093 0.0019 1.0000
# 平移矩阵
>> stereoParams.TranslationOfCamera2
ans =
-119.9578 0.1121 -0.2134
Matlab如图所示: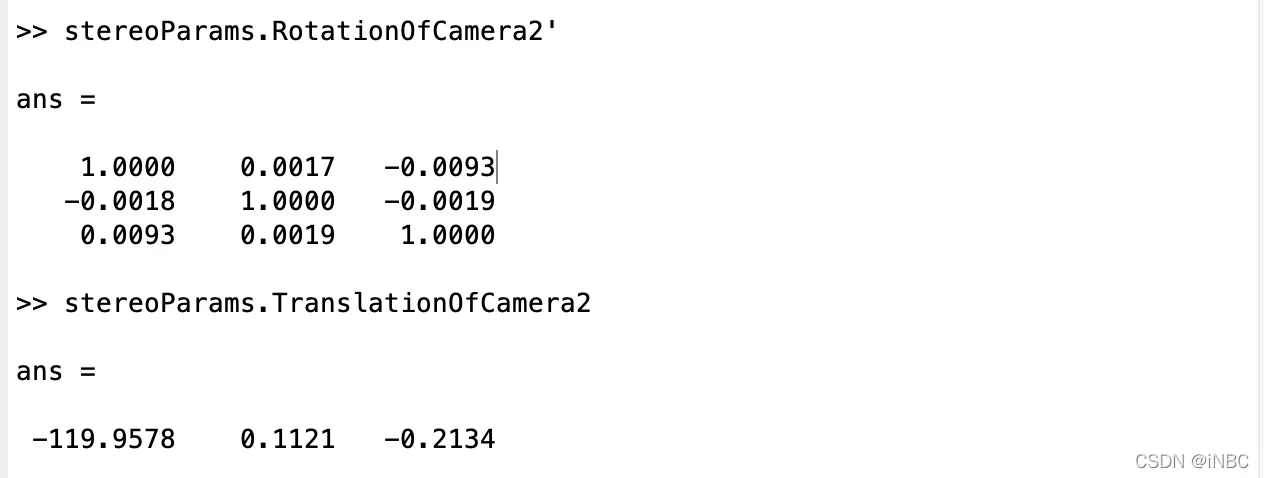
4、获取基线距离,单位:mm, 为平移向量的第一个参数(取绝对值)。
self.baseline = 119.9578 # 单位:mm, 为平移向量的第一个参数(取绝对值)
至此,双目相机的参数已经校准完毕。
耐心点,慢慢来,你会成功的! ! !
文章出处登录后可见!