一,使用对极几何约束求R,T
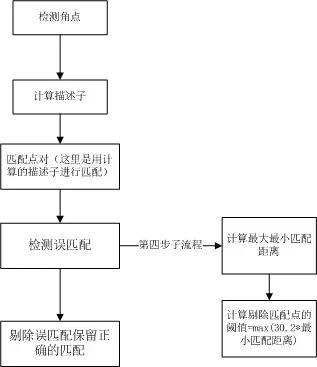
第一步:特征匹配。提取出有效的匹配点
void find_feature_matches(const Mat &img_1, const Mat &img_2,
std::vector<KeyPoint> &keypoints_1,
std::vector<KeyPoint> &keypoints_2,
std::vector<DMatch> &matches) {
//-- 初始化
Mat descriptors_1, descriptors_2;
// used in OpenCV3
Ptr<FeatureDetector> detector = ORB::create();
Ptr<DescriptorExtractor> descriptor = ORB::create();
// use this if you are in OpenCV2
// Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" );
// Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" );
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming");
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect(img_1, keypoints_1);
detector->detect(img_2, keypoints_2);
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute(img_1, keypoints_1, descriptors_1);
descriptor->compute(img_2, keypoints_2, descriptors_2);
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
vector<DMatch> match;
// BFMatcher matcher ( NORM_HAMMING );
matcher->match(descriptors_1, descriptors_2, match);
//-- 第四步:匹配点对筛选
double min_dist = 10000, max_dist = 0;
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for (int i = 0; i < descriptors_1.rows; i++) {
double dist = match[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist);
printf("-- Min dist : %f \n", min_dist);
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
for (int i = 0; i < descriptors_1.rows; i++) {
if (match[i].distance <= max(2 * min_dist, 30.0)) {
matches.push_back(match[i]);
}
}
}
第二步:根据匹配点对,依据对极几何约束原理,求相机运动的R,t

void pose_estimation_2d2d(
const std::vector<KeyPoint> &keypoints_1,
const std::vector<KeyPoint> &keypoints_2,
const std::vector<DMatch> &matches,
Mat &R, Mat &t) {
// 相机内参,TUM Freiburg2
Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
//-- 把匹配点转换为vector<Point2f>的形式
vector<Point2f> points1;
vector<Point2f> points2;
for (int i = 0; i < (int) matches.size(); i++) {
points1.push_back(keypoints_1[matches[i].queryIdx].pt);
points2.push_back(keypoints_2[matches[i].trainIdx].pt);
}
//-- 计算本质矩阵
Point2d principal_point(325.1, 249.7); //相机主点, TUM dataset标定值
int focal_length = 521; //相机焦距, TUM dataset标定值
Mat essential_matrix;
essential_matrix = findEssentialMat(points1, points2, focal_length, principal_point);
//-- 从本质矩阵中恢复旋转和平移信息.
recoverPose(essential_matrix, points1, points2, R, t, focal_length, principal_point);
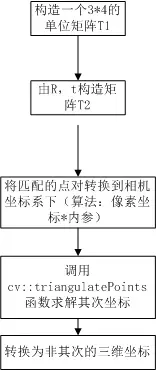
}第三步:根据针孔相机模型的公式,由 R,t估计特征点的空间坐标
//三角化,根据匹配点和求解到的三维点。存储在points中
void triangulation(
const vector<KeyPoint> &keypoint_1,
const vector<KeyPoint> &keypoint_2,
const std::vector<DMatch> &matches,
const Mat &R, const Mat &t,
vector<Point3d> &points) {
Mat T1 = (Mat_<float>(3, 4) <<
1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1, 0);
//根据求解到的RT构造T2矩阵
Mat T2 = (Mat_<float>(3, 4) <<
R.at<double>(0, 0), R.at<double>(0, 1), R.at<double>(0, 2), t.at<double>(0, 0),
R.at<double>(1, 0), R.at<double>(1, 1), R.at<double>(1, 2), t.at<double>(1, 0),
R.at<double>(2, 0), R.at<double>(2, 1), R.at<double>(2, 2), t.at<double>(2, 0)
);
//相机内参
Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
vector<Point2f> pts_1, pts_2;
for (DMatch m:matches) {
// 将像素坐标转换至相机坐标
pts_1.push_back(pixel2cam(keypoint_1[m.queryIdx].pt, K));
pts_2.push_back(pixel2cam(keypoint_2[m.trainIdx].pt, K));
}
Mat pts_4d;
cv::triangulatePoints(T1, T2, pts_1, pts_2, pts_4d);
// 转换成非齐次坐标
for (int i = 0; i < pts_4d.cols; i++) {
Mat x = pts_4d.col(i);
x /= x.at<float>(3, 0); // 归一化
Point3d p(
x.at<float>(0, 0),
x.at<float>(1, 0),
x.at<float>(2, 0)
);
points.push_back(p);
}
}总的代码为:
#include <iostream>
#include <opencv2/opencv.hpp>
// #include "extra.h" // used in opencv2
using namespace std;
using namespace cv;
void find_feature_matches(
const Mat &img_1, const Mat &img_2,
std::vector<KeyPoint> &keypoints_1,
std::vector<KeyPoint> &keypoints_2,
std::vector<DMatch> &matches);
void pose_estimation_2d2d(
const std::vector<KeyPoint> &keypoints_1,
const std::vector<KeyPoint> &keypoints_2,
const std::vector<DMatch> &matches,
Mat &R, Mat &t);
void triangulation(
const vector<KeyPoint> &keypoint_1,
const vector<KeyPoint> &keypoint_2,
const std::vector<DMatch> &matches,
const Mat &R, const Mat &t,
vector<Point3d> &points
);
/// 作图用
inline cv::Scalar get_color(float depth) {
float up_th = 50, low_th = 10, th_range = up_th - low_th;
if (depth > up_th) depth = up_th;
if (depth < low_th) depth = low_th;
return cv::Scalar(255 * depth / th_range, 0, 255 * (1 - depth / th_range));
}
// 像素坐标转相机归一化坐标
Point2f pixel2cam(const Point2d &p, const Mat &K);
int main(int argc, char **argv) {
if (argc != 3) {
cout << "usage: triangulation img1 img2" << endl;
return 1;
}
//-- 读取图像
Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR);
Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR);
vector<KeyPoint> keypoints_1, keypoints_2;
vector<DMatch> matches;
find_feature_matches(img_1, img_2, keypoints_1, keypoints_2, matches);
cout << "一共找到了" << matches.size() << "组匹配点" << endl;
//-- 估计两张图像间运动
Mat R, t;
pose_estimation_2d2d(keypoints_1, keypoints_2, matches, R, t);
//-- 三角化
vector<Point3d> points;
//tr是三维点
triangulation(keypoints_1, keypoints_2, matches, R, t, tr);
//-- 验证三角化点与特征点的重投影关系
Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
Mat img1_plot = img_1.clone();
Mat img2_plot = img_2.clone();
for (int i = 0; i < matches.size(); i++) {
// 第一个图
float depth1 = points[i].z;
cout << "depth: " << depth1 << endl;
Point2d pt1_cam = pixel2cam(keypoints_1[matches[i].queryIdx].pt, K);
cv::circle(img1_plot, keypoints_1[matches[i].queryIdx].pt, 2, get_color(depth1), 2);
// 第二个图
Mat pt2_trans = R * (Mat_<double>(3, 1) << points[i].x, points[i].y, points[i].z) + t;
float depth2 = pt2_trans.at<double>(2, 0);
cv::circle(img2_plot, keypoints_2[matches[i].trainIdx].pt, 2, get_color(depth2), 2);
}
cv::imshow("img 1", img1_plot);
cv::imshow("img 2", img2_plot);
cv::waitKey();
return 0;
}
void find_feature_matches(const Mat &img_1, const Mat &img_2,
std::vector<KeyPoint> &keypoints_1,
std::vector<KeyPoint> &keypoints_2,
std::vector<DMatch> &matches) {
//-- 初始化
Mat descriptors_1, descriptors_2;
// used in OpenCV3
Ptr<FeatureDetector> detector = ORB::create();
Ptr<DescriptorExtractor> descriptor = ORB::create();
// use this if you are in OpenCV2
// Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" );
// Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" );
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming");
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect(img_1, keypoints_1);
detector->detect(img_2, keypoints_2);
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute(img_1, keypoints_1, descriptors_1);
descriptor->compute(img_2, keypoints_2, descriptors_2);
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
vector<DMatch> match;
// BFMatcher matcher ( NORM_HAMMING );
matcher->match(descriptors_1, descriptors_2, match);
//-- 第四步:匹配点对筛选
double min_dist = 10000, max_dist = 0;
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for (int i = 0; i < descriptors_1.rows; i++) {
double dist = match[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist);
printf("-- Min dist : %f \n", min_dist);
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
for (int i = 0; i < descriptors_1.rows; i++) {
if (match[i].distance <= max(2 * min_dist, 30.0)) {
matches.push_back(match[i]);
}
}
}
void pose_estimation_2d2d(
const std::vector<KeyPoint> &keypoints_1,
const std::vector<KeyPoint> &keypoints_2,
const std::vector<DMatch> &matches,
Mat &R, Mat &t) {
// 相机内参,TUM Freiburg2
Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
//-- 把匹配点转换为vector<Point2f>的形式
vector<Point2f> points1;
vector<Point2f> points2;
for (int i = 0; i < (int) matches.size(); i++) {
points1.push_back(keypoints_1[matches[i].queryIdx].pt);
points2.push_back(keypoints_2[matches[i].trainIdx].pt);
}
//-- 计算本质矩阵
Point2d principal_point(325.1, 249.7); //相机主点, TUM dataset标定值
int focal_length = 521; //相机焦距, TUM dataset标定值
Mat essential_matrix;
essential_matrix = findEssentialMat(points1, points2, focal_length, principal_point);
//-- 从本质矩阵中恢复旋转和平移信息.
recoverPose(essential_matrix, points1, points2, R, t, focal_length, principal_point);
}
//三角化,根据匹配点和求解到的三维点。存储在points中
void triangulation(
const vector<KeyPoint> &keypoint_1,
const vector<KeyPoint> &keypoint_2,
const std::vector<DMatch> &matches,
const Mat &R, const Mat &t,
vector<Point3d> &points) {
Mat T1 = (Mat_<float>(3, 4) <<
1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1, 0);
//根据求解到的RT构造T2矩阵
Mat T2 = (Mat_<float>(3, 4) <<
R.at<double>(0, 0), R.at<double>(0, 1), R.at<double>(0, 2), t.at<double>(0, 0),
R.at<double>(1, 0), R.at<double>(1, 1), R.at<double>(1, 2), t.at<double>(1, 0),
R.at<double>(2, 0), R.at<double>(2, 1), R.at<double>(2, 2), t.at<double>(2, 0)
);
//相机内参
Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
vector<Point2f> pts_1, pts_2;
for (DMatch m:matches) {
// 将像素坐标转换至相机坐标
pts_1.push_back(pixel2cam(keypoint_1[m.queryIdx].pt, K));
pts_2.push_back(pixel2cam(keypoint_2[m.trainIdx].pt, K));
}
Mat pts_4d;
cv::triangulatePoints(T1, T2, pts_1, pts_2, pts_4d);
// 转换成非齐次坐标
for (int i = 0; i < pts_4d.cols; i++) {
Mat x = pts_4d.col(i);
x /= x.at<float>(3, 0); // 归一化
Point3d p(
x.at<float>(0, 0),
x.at<float>(1, 0),
x.at<float>(2, 0)
);
points.push_back(p);
}
}
Point2f pixel2cam(const Point2d &p, const Mat &K) {
return Point2f
(
(p.x - K.at<double>(0, 2)) / K.at<double>(0, 0),
(p.y - K.at<double>(1, 2)) / K.at<double>(1, 1)
);
}
执行的结果显示为: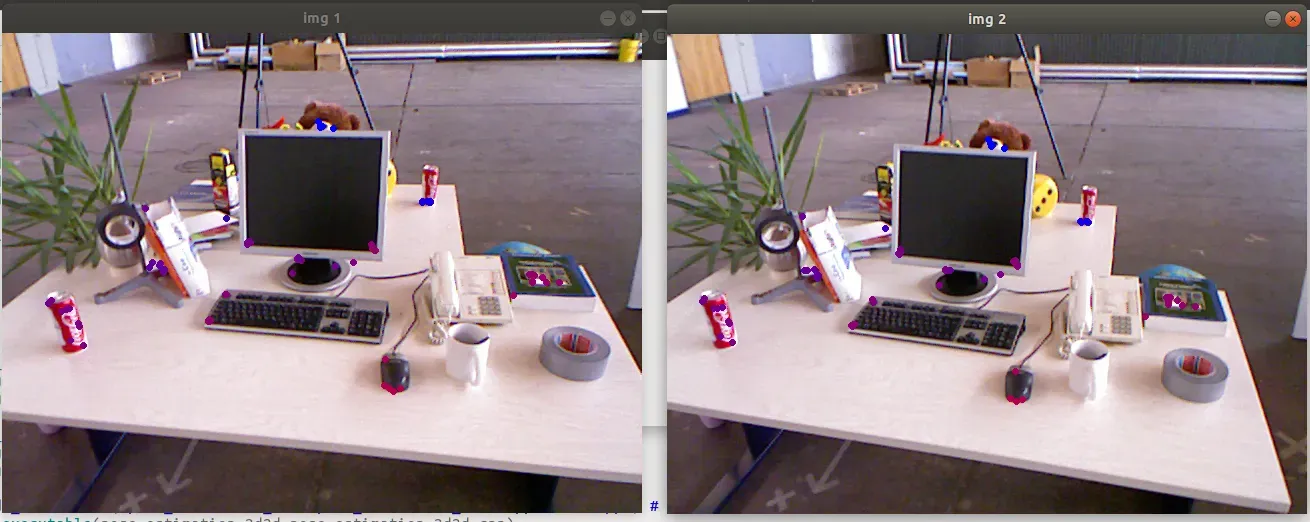
补充:
- 计算相机的运动和特征点的3D位置,称为单目SLAM的初始化,在初始化之后就可以用3D-2D计算相机运动了。单目初始化的初期使用的是相机的左右平移来完成;
- 当匹配的特征点多余8个点对的时候,如果匹配准确的话使用最小二乘法,如果考虑到匹配的不准确性的话,使用随机采样一致性求解该矩阵;
- 单目SLAM中,使用对极几何约束,估计了相机的运动后,也没有办法获得像素的深度信息,需要通过三角测量方法估计相机的深度;
- 知道了R,T,还有匹配的对应的两个点,可以求出深度S1,S2,由于噪声存在,所以常见的做法是求最小二乘法而不是直接求解;
- 三角测量是平移得到的,只有平移才能得到对极几何中的三角形,才能谈得上三角测量;
二、关键技术解释
对极几何的图示:
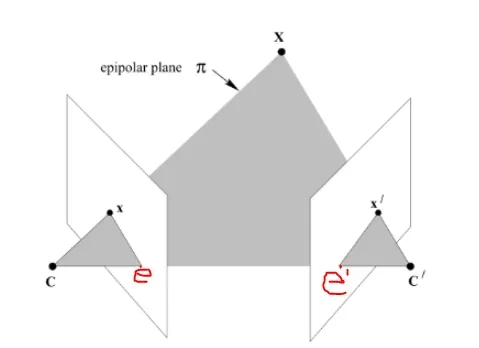
两视图的对极几何可以理解为图像平面与以基线为轴的平面束相交的几何关系,其中主要有几种概念:
(1)基线(base line):两个相机中心的连线CC’称为基线。
(2)对极点(epipolar):ee’是对极点,是基线与两个成像平面的交点,也就是两个相机在另一个成像平面上的像点。
(3)对极平面(epipolar plane):过基线的平面都称之为对极平面,其中两个相机的中心C和C’,三维点X,以及三维点在两个相机成像点xx’这五点必定在同一对极平面上,当三维点X变化时,对极平面绕着基线旋转,形成对极平面束。
(4)对极线(epipolar line):是对极平面和成像平面的交线,所有的对极线都相交于极点。
对极约束是指在平面2上的p点在平面1上的对应点一定在基线I’上,这句话说明了对极约束是一个点到直线的射影映射关系。如图所示:
算法原理:空间的一个点P。在平面上的投影点,一定在两个像平面的极线上,且具有一定的旋转平移关系,通过对极平面的约束,然后求解出相机的运动,即R,t.
ORB-SLAM中通过E、F矩阵就可以利用两视图中的匹配点求解出相对姿态了,不过这个方法存在一个问题——当两个视图的相机中心相同时,也就是R,t中的t为0,这时对极几何的基础也就不成立了,可知E、F均为0无法求解。这时就需要使用平面间的单应性H矩阵恢复R,t。
单应性矩阵Homogeneous是射影几何中的一个术语,又称之为射影变换。本质上是一个数学概念,一般所说的单应矩阵是平面上的单应性矩阵,主要用来解决两个问题:
(1)表述真实世界中一个平面与他对应图像的透视变换
(2)通过透视变换实现图像从一个视图变换到另一个视图的转换。
单应矩阵求解方法:
(1)直接线性变换法。
(2)RANSAC-估计单应矩阵
平面的单应矩阵和对极约束的F矩阵的区别
两图像间的对极约束和场景的结构无关,可以理解对极约束对于任意场景结构的两幅图像都是成立的,约束是不能给出两幅图像上的像点的一一对应关系,但是可以给出点对应的必要条件,另一幅图像上对应的像点位于对应的对极线上。基础矩阵F描述的实际是一种点和直线的映射关系,而不是一种点对点的约束关系,并不能给出另一个点的确切位置。
平面间的单应矩阵,并不像对极约束完全不需要场景的结构信息,它对场景的结构有了要求,场景的点必须在同一个平面上,因此单应矩阵H也就能够对两图像上对应点的提供更多的约束,知道了某点在一幅图像的像点位置后,可以通过单应矩阵,求得其在另一幅图像中像点的确切位置。
单应矩阵的应用场景是相机只有旋转而无平移的时候,两视图的对极约束不成立,基础矩阵F为零矩阵,这时候需要使用单应矩阵H,场景中的点都在同一个平面上,可以使用单应矩阵计算像点的匹配点。 相机的平移距离相对于场景的深度较小的时候,也可以使用单应矩阵H。
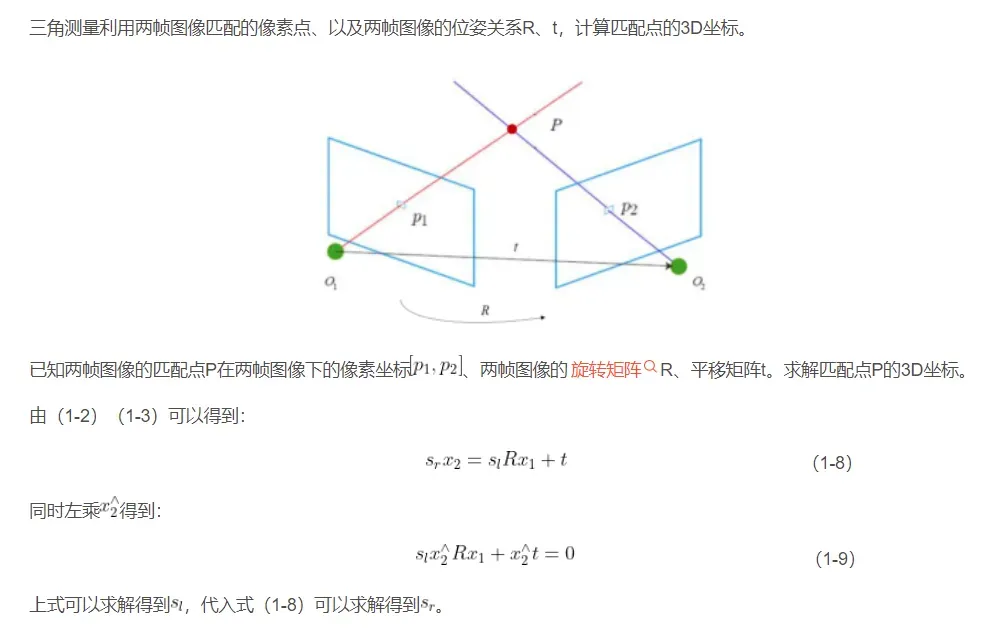
2)三角测量
利用对极几何约束估计相机运动之后,我们还需要通过三角测量来估计地图点的深度,三角测量(三角化)指的是,通过在两处观测同一个点的夹角,从而确定该点的距离。SLAM中主要用三角化来估计像素点的距离。
![]()
文章出处登录后可见!