AbolDeepIO: A Novel Deep Inertial Odometry Network for Autonomous Vehicles
AbolDeepIO:一种新型的自动驾驶汽车深度惯性里程计网络
一、介绍
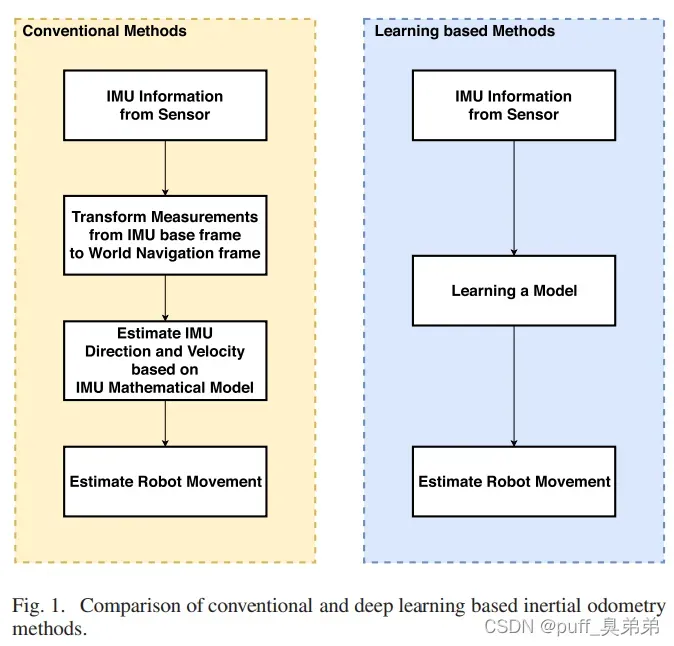
在惯性里程计领域内,传统的方法通过传感器获取IMU(惯性测量单元)的信息,并将测量后的数据通过IMU基准转换到世界基准内,接着通过数学模型预估IMU的方向和速度,来预测机器的运动。
而本文基于的新方法,即深度学习方法,同样使用传感器获取IMU信息,但是用获取的信息来训练深度学习网络模型,使用聚合特征向量能同时结合视觉和惯性信息,以获取更好的效果,最后将网络输出的信息用于预测机器的运动。
具体对比如下图:
在此基础上,本文还提出了一种新的网络结构,效果比目前所有的相关网络都要好。它包含了三通道结构,以发掘分别对应加速度计、陀螺仪和采样时间合适的特征表示,并在输入层包含了噪声网络,使其对噪声和异常值具有鲁棒性。
详细地说,本文根据 IMU 的不同测量类型,提出了一种新颖的三通道长短期记忆 (LSTM) 网络架构。
首次使用 IMU 采样时间(两个连续 IMU 读数之间的时间间隔)作为惯性网络的另一个输入,这是从 IMU 测量中估计传感器运动的关键输入。
首次在深度惯性里程计网络的制定中考虑 IMU 传感器的噪声模型,并为所提出的网络架构的每个通道使用特定的高斯噪声层对其行为进行建模。
将 IMU 测量值拆分到特定窗口,并根据论文中讨论的不同方法学习用于拆分的顺序网络。
讨论和评估用于自动驾驶汽车和智能手机的视觉惯性里程计方法使用的不同惯性里程计网络架构,并比较它们的性能、优点和缺点。
二、提出的方法
对于加速度计,其采集的信息单位为,而陀螺仪采集的信息单位为
,因此简单地将二者的关联到同一输入空间是不可取的,有一种方法是将二者标准化后再进行关联,可是由于二者噪声分布的不同,这样会使噪声难以被模型学习。
此外,IMU的采样延迟也应该重点考虑。
对于噪声,加速度计和陀螺仪的噪声通常服从方差不同的0均值高斯分布,对于方差,可以使用概率密度函数将其区分提取,概率密度函数的参数由IMU的提供商提供。
作者使用了三个通道分别学习它们的特征表示,并使用缓慢聚合网络提取出有意义的特征表示,具体结构如下图所示:
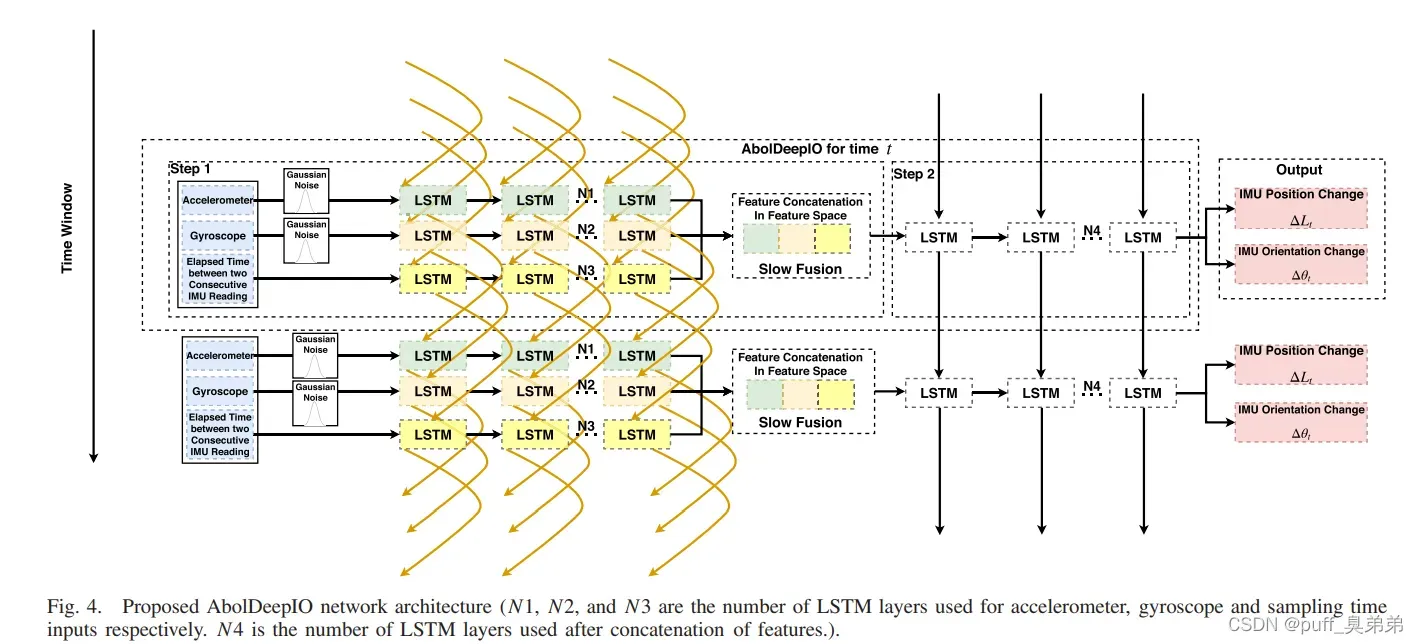
值得注意的是,加速度计和陀螺仪都是(N,3)维的变量,而采样时间是(N,1)维的变量,其中N取决于窗口化的大小,例如。对于100Hz采样IMU来说,如果窗口有10个,则N=100/10=10,10个窗口分别包含了10个连续的IMU读数。由于IMU的读数每秒都是独立的,每个窗口在计算时都要包含当前t、过去t-1、和未来t+1的数据(包含未来的数据,也是本文的创新点之一),这也是由于IMU采样频率通常很高而做出的选择。
对于可加性零均值高斯噪声,每层LSTM网络层(N1、N2、N3)先是独立地提取数据的特征表示,并且由于噪声的突变通常很尖锐,很有必要在网络中随机舍弃某个单元、以防止过拟合。
这些过程之后,网络已经学习了将IMU测量空间映射到特征空间的能力,此时在网络结构的第二步,三者的特征信息都将互相联结,网络可以在这一步学习到将不同的输入映射到相同特征空间的能力。
在联结完毕后,LSTM的N4层将这种高纬度的特征映射为IMU的平移与旋转的位移量,网络的输出为,即为连续IMU数据在3维世界中表现的数据类型。对于IMU数据,
的定义为:
其中,t = N代表在窗口中[0,N]范围内的某一步。代表传感器在3维笛卡尔坐标系中的位移,
代表两个连续的四元数坐标系下的IMU测量值的位移。这些是由于IMU的测量数据并不是基于世界坐标系而决定的,所以直接输出x、y、z变得几乎不可能。
因此,模型输入输出的变换为:
其中,数字7表示输入数据的大小(加速度计3,陀螺仪3,采样时间1)
损失函数定义为:
损失函数要最小化数据预测值与实际的
之间的差别。其中i为时间步数。
本文试验了两种训练方式,如下图:
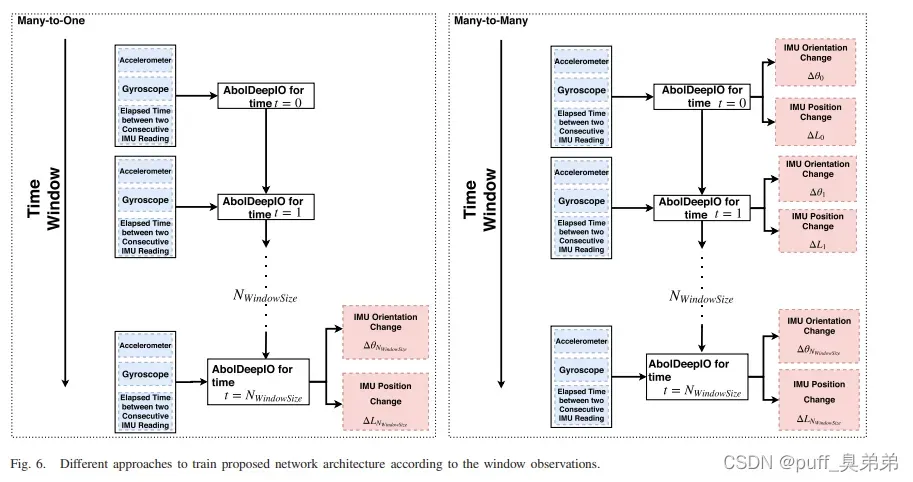
一种是多对一训练方式、而另一种为多对多,由于多对多训练的方式能获取更全面的目标信息,因此不论是实验还是结果都证明多对多训练方法表现更为优异。
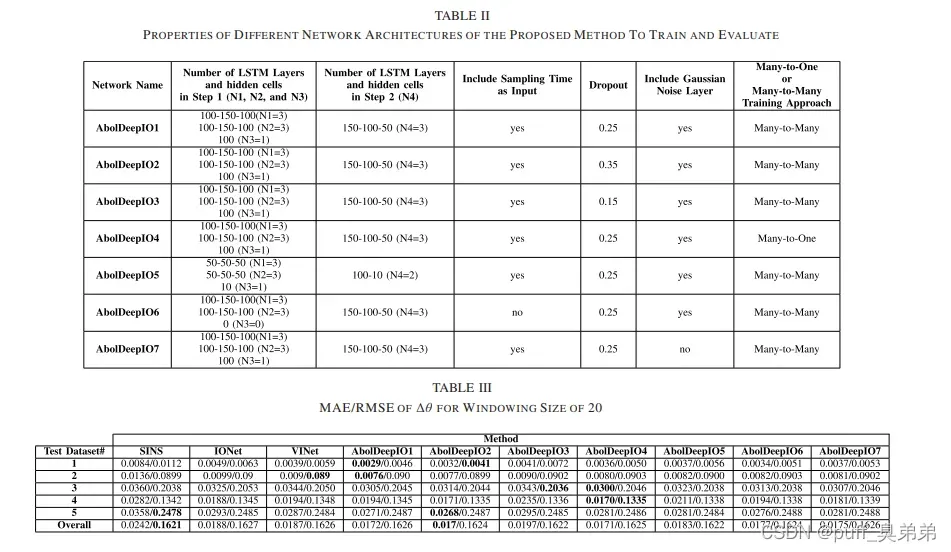
三、实验与结果
作者使用了公开的MAV数据集进行训练和测试,并同时测试了IONet、 IO of VINet以及广受欢迎的传统方法SINS的表现,并测试了不同窗口大小对结果的影响,具体结果如下表:
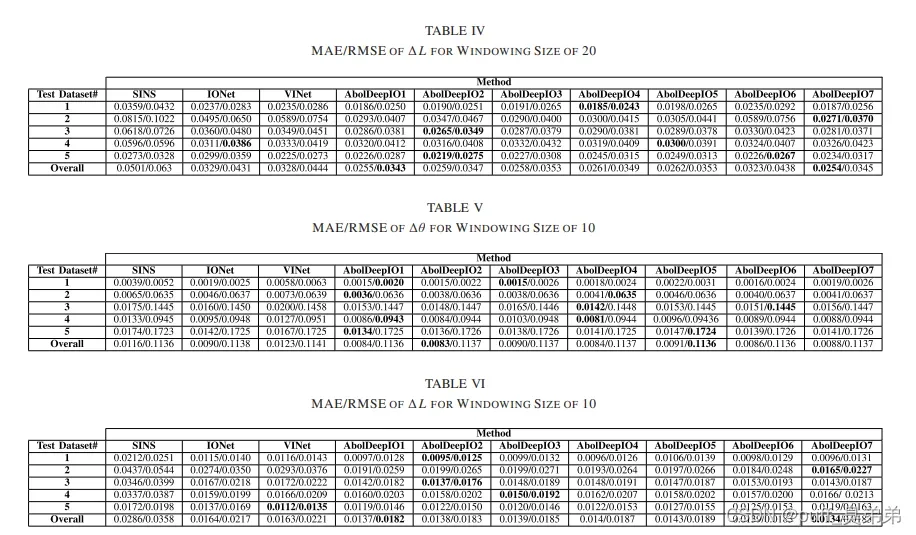
并测试了不同方法下,误差传播随时间的变化如下图:
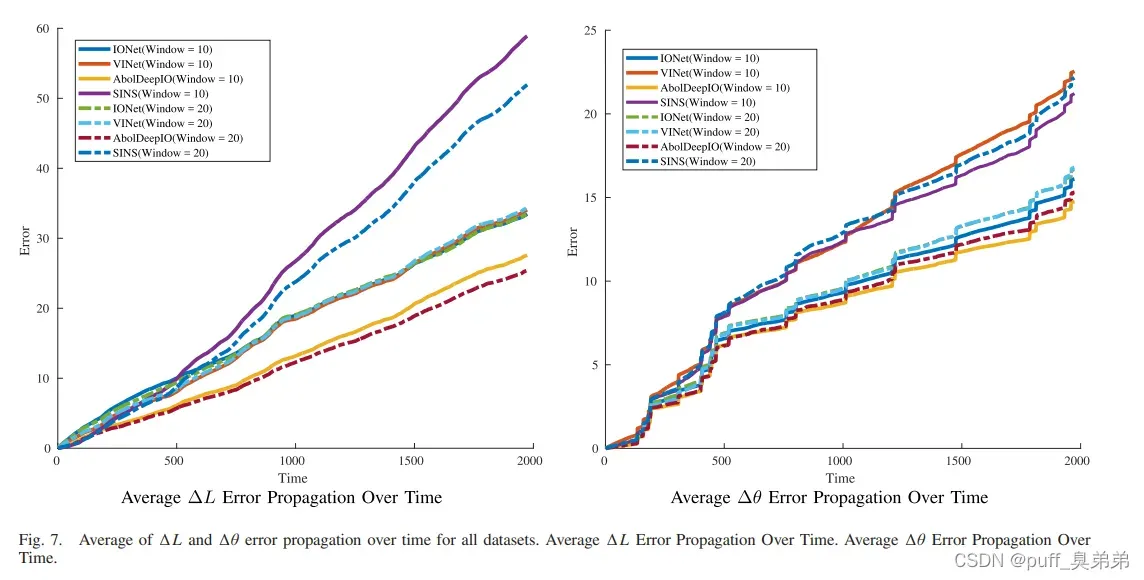
可以看出误差传播速度是最小的,并且窗口的大小对此并无明显影响。
文章出处登录后可见!