launch 文件
launch文件可以同时配置和启动多个ros节点。ROS2中的launch文件可以用Python、xml、yaml来写。
但ROS2中的Python launch文件更为灵活,功能也更加强大。可以用它执行一些其他的任务(比如新建目录,配置环境变量)。所以官方推荐的是使用python来写。而launch文件一般会放在功能包中的launch文件夹下面。如果想感受一下各种方式写launch文件的效果,可以点开下面的链接体会一下。
https://docs.ros.org/en/galactic/How-To-Guides/Launch-file-different-formats.html
launch文件一般通过下面的命令启动:
ros2 launch <package_name> <launch_file_name>
值的注意的是,当package编译时加了--symlink-install选项,在包内修改了launch文件,不用编译也是生效的。
首先,我们来体验一下launch文件的功能。这里重声一下launch文件的作用:配置节点和启动节点。
运行下面的命令,可以看到我们同时启动了两个小乌龟的窗口。
ros2 launch turtlesim multisim.launch.py
回想一下,我们之前启动小乌龟窗口时是用下面的命令启动的。
ros2 run turtlesim turtlesim_node
那launch文件又是怎么同时启动两个小乌龟窗口的呢?我们看一下launch文件的内容。
存储路径:/opt/ros/galactic/share/turtlesim/launch
from launch import LaunchDescription
import launch_ros.actions
def generate_launch_description():
return LaunchDescription([
launch_ros.actions.Node(
namespace= "turtlesim1", package='turtlesim', executable='turtlesim_node', output='screen'),
launch_ros.actions.Node(
namespace= "turtlesim2", package='turtlesim', executable='turtlesim_node', output='screen'),
])
launch文件中定义了一个generate_launch_description() 函数,它返回LaunchDescription 。而在LaunchDescription 中写了需要启动的节点,当然还可以加其他的内容,比如参数声明等等。
运行rqt_graph,可以看到下面的节点图
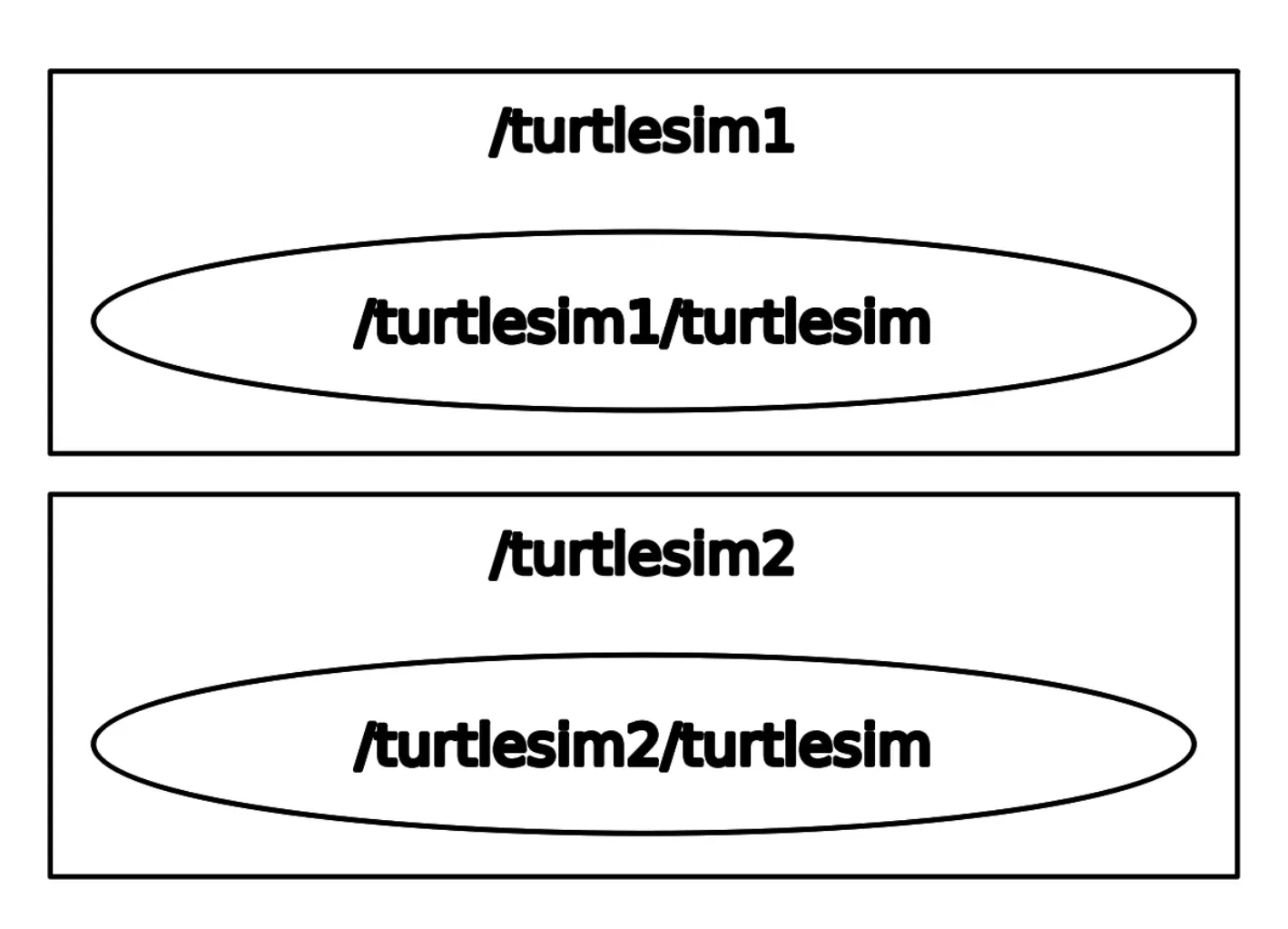
可以发现,launch文件启动了两次同一个执行文件。这个执行文件是turtlesim包中的turtlesim_node。可以在/opt/ros/galactic/lib/turtlesim目录下找到turtlesim_node 。namespace是为了让节点处于不同的命名空间内,这一点在上面的图中有体现出来。output='screen' 的意思是执行的节点打印的log直接在窗口中输出。除此之外,log也会存在~/.ros/log 目录下(这是默认路径,其实也是可以配置的)。
虽然python launch文件写起来比xml、yaml都要冗余,但也是有套路的。
可将launch文件分为四部分,这样比较好理解。
导入模块
这部分其实是python的语法。意思是,如果你想用另一个python文件的函数,需要将其import进来,类似于C/C++中的include语法。比如下面的写法:
from launch import LaunchDescription
import launch_ros.actions
参数声明
这一部分主要是声明有哪些参数,并且给每个参数赋上默认值。
声明参数
这一部分是在launch系统中,以名称来访问参数的值。意味着,上级launch文件可以传值给下级launch文件。
These
LaunchConfigurationsubstitutions allow us to acquire the value of the launch argument in any part of the launch description.
# Input parameters declaration
namespace = LaunchConfiguration('namespace')
params_file = LaunchConfiguration('params_file')
use_sim_time = LaunchConfiguration('use_sim_time')
#如果launch系统中没有这个参数,可以给它赋默认值
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
autostart = LaunchConfiguration('autostart')
给参数赋默认值
这些参数是上级的launch文件传给下级的launch文件的参数。
DeclareLaunchArgumentis used to define the launch argument that can be passed from the above launch file or from the console.
# Declare the launch arguments
declare_namespace_cmd = DeclareLaunchArgument(
'namespace',
default_value='',
description='Top-level namespace')
declare_params_file_cmd = DeclareLaunchArgument(
'params_file',
default_value=os.path.join(bringup_dir, 'params', 'nav2_params.yaml'),
description='Full path to the ROS2 parameters file to use for all launched nodes')
declare_use_sim_time_cmd = DeclareLaunchArgument(
'use_sim_time',
default_value='True',
description='Use simulation (Gazebo) clock if true')
declare_autostart_cmd = DeclareLaunchArgument(
'autostart', default_value='True',
description='Automatically startup the nav2 stack')
参数配置好后就可以输入到node节点中了。同时,这些参数也可以在启动launch文件的同时临时修改。
形式为下面的方式:
ros2 launch <package_name> <launch_file_name> use_sim_time:=0
ros2 launch launch_tutorial example_substitutions.launch.py turtlesim_ns:='turtlesim3' use_provided_red:='True' new_background_r:=200
构建需启动的节点
这个部分主要是写明需要启动哪些节点。并且将节点需要的参数配置好。
# Nodes launching commands
start_map_saver_server_cmd = Node(
package='nav2_map_server',
executable='map_saver_server',
output='screen',
parameters=[configured_params])
start_lifecycle_manager_cmd = Node(
package='nav2_lifecycle_manager',
executable='lifecycle_manager',
name='lifecycle_manager_slam',
output='screen',
parameters=[{'use_sim_time': use_sim_time},
{'autostart': autostart},
{'node_names': lifecycle_nodes}])
start_rviz_cmd = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
output='screen')
# perform remap so both turtles listen to the same command topic
forward_turtlesim_commands_to_second_turtlesim_node = Node(
package='turtlesim',
executable='mimic',
name='mimic',
remappings=[
('/input/pose', '/turtlesim1/turtle1/pose'),
('/output/cmd_vel', '/turtlesim2/turtle1/cmd_vel'),
]
)
节点中有8个参数。如果不需要配置可以不写,让它保持默认值。
前面已经提到namespace是为了让节点处于不同的命名空间内,这一点可以在上面的图中体现出来。output='screen' 的意思是执行的节点打印的log直接在窗口中输出。除此之外,log也会存在~/.ros/log 目录下(这是默认路径,其实也是可以配置的)。
补充一下其他几个参数
package='nav2_lifecycle_manager' 是指这个节点在哪个ros2包里。executable='lifecycle_manager' 指明需要运行的程序是ros2包中的哪一个执行文件(一个ros包是可以包含多个执行文件的)。
parameters 中可以配置node的参数。这些参数通常会在参数声明部分赋好值,这里直接传给节点即可。同时这里也可以直接传入yaml参数文件。arguments=['-d', rviz_config_dir] 是节点内部实现的参数。通常通过main函数的行参获取。比如下面这个命令:
run rviz2 rviz2 -d $(ros2 pkg prefix --share turtle_tf2_py)/rviz/turtle_rviz.rviz
其中-d就是通过main函数传入进去的参数。
下面的参数用于将两个话题名称对等。左边是节点内部代码内写明的,右边为系统中其他节点提供的话题。
remappings=[
('/input/pose', '/turtlesim1/turtle1/pose'),
('/output/cmd_vel', '/turtlesim2/turtle1/cmd_vel'),
]
给节点配置参数文件的示例
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
config = os.path.join(
get_package_share_directory('launch_tutorial'),
'config',
'turtlesim.yaml'
)
return LaunchDescription([
Node(
package='turtlesim',
executable='turtlesim_node',
namespace='turtlesim2',
name='sim',
parameters=[config]
)
])
注意parameters=[config]就是给节点配置yaml参数文件。
启动命令
这一部分只需将前面配置好的命令,用add_action方法加入即可。当然,这里其实有两种写法。一种是下面这种。
# Create the launch description and populate
ld = LaunchDescription()
# Set environment variables
ld.add_action(stdout_linebuf_envvar)
# Declare the launch options
ld.add_action(declare_namespace_cmd)
ld.add_action(declare_use_namespace_cmd)
ld.add_action(declare_slam_cmd)
ld.add_action(declare_map_yaml_cmd)
ld.add_action(declare_use_sim_time_cmd)
ld.add_action(declare_params_file_cmd)
ld.add_action(declare_autostart_cmd)
# Add the actions to launch all of the navigation nodes
ld.add_action(bringup_cmd_group)
return ld
另一种是直接将启动的内容写在return语句中。
return LaunchDescription([
DeclareLaunchArgument(
'map',
default_value=map_dir,
description='Full path to map file to load'),
DeclareLaunchArgument(
'params_file',
default_value=param_dir,
description='Full path to param file to load'),
DeclareLaunchArgument(
'use_sim_time',
default_value='false',
description='Use simulation (Gazebo) clock if true'),
IncludeLaunchDescription(
PythonLaunchDescriptionSource([nav2_launch_file_dir, '/bringup_launch.py']),
launch_arguments={
'map': map_dir,
'use_sim_time': use_sim_time,
'params_file': param_dir}.items(),
),
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
output='screen'),
])
launch文件中常用到的语句
获取路径
import os
from ament_index_python.packages import get_package_share_directory
# Get the launch directory
bringup_dir = get_package_share_directory('nav2_bringup')#获取包的路径
launch_dir = os.path.join(bringup_dir, 'launch')#组合包内路径
设置环境变量
from launch.actions import SetEnvironmentVariable
stdout_linebuf_envvar = SetEnvironmentVariable('RCUTILS_LOGGING_BUFFERED_STREAM', '1')
获取环境变量的值
import os
TURTLEBOT3_MODEL = os.environ['TURTLEBOT3_MODEL']
包含另外一个python launch文件
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
IncludeLaunchDescription(
PythonLaunchDescriptionSource([nav2_launch_file_dir, '/bringup_launch.py']),
launch_arguments={
'map': map_dir,
'use_sim_time': use_sim_time,
'params_file': param_dir}.items(), #这里给内嵌的python launch文件传入参数
),
给一组节点添加同一个命名空间
from launch.actions import GroupAction
from launch_ros.actions import PushRosNamespace
...
turtlesim_world_2 = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/turtlesim_world_2.launch.py'])
)
turtlesim_world_2_with_namespace = GroupAction(
actions=[
PushRosNamespace('turtlesim2'),
turtlesim_world_2,
]
)
在launch文件中执行命令
from launch_ros.actions import Node
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument, ExecuteProcess, TimerAction
from launch.conditions import IfCondition
from launch.substitutions import LaunchConfiguration, PythonExpression
def generate_launch_description():
turtlesim_ns = LaunchConfiguration('turtlesim_ns')
use_provided_red = LaunchConfiguration('use_provided_red')
new_background_r = LaunchConfiguration('new_background_r')
turtlesim_ns_launch_arg = DeclareLaunchArgument(
'turtlesim_ns',
default_value='turtlesim1'
)
use_provided_red_launch_arg = DeclareLaunchArgument(
'use_provided_red',
default_value='False'
)
new_background_r_launch_arg = DeclareLaunchArgument(
'new_background_r',
default_value='200'
)
turtlesim_node = Node(
package='turtlesim',
namespace=turtlesim_ns,
executable='turtlesim_node',
name='sim'
)
spawn_turtle = ExecuteProcess(
cmd=[[
'ros2 service call ',
turtlesim_ns,
'/spawn ',
'turtlesim/srv/Spawn ',
'"{x: 2, y: 2, theta: 0.2}"'
]],
shell=True
)
change_background_r = ExecuteProcess(
cmd=[[
'ros2 param set ',
turtlesim_ns,
'/sim background_r ',
'120'
]],
shell=True
)
change_background_r_conditioned = ExecuteProcess(
condition=IfCondition(
PythonExpression([
new_background_r,
' == 200',
' and ',
use_provided_red
])
),
cmd=[[
'ros2 param set ',
turtlesim_ns,
'/sim background_r ',
new_background_r
]],
shell=True
)
return LaunchDescription([
turtlesim_ns_launch_arg,
use_provided_red_launch_arg,
new_background_r_launch_arg,
turtlesim_node,
spawn_turtle,
change_background_r,
TimerAction(
period=2.0,
actions=[change_background_r_conditioned],
)
])
分析几个launch文件
包含多个其他launch文件
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
turtlesim_world_1 = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/turtlesim_world_1.launch.py'])
)
turtlesim_world_2 = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/turtlesim_world_2.launch.py'])
)
broadcaster_listener_nodes = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/broadcaster_listener.launch.py']),
launch_arguments={'target_frame': 'carrot1'}.items(),
)
mimic_node = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/mimic.launch.py'])
)
fixed_frame_node = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/fixed_broadcaster.launch.py'])
)
rviz_node = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('launch_tutorial'), 'launch'),
'/turtlesim_rviz.launch.py'])
)
return LaunchDescription([
turtlesim_world_1,
turtlesim_world_2,
broadcaster_listener_nodes,
mimic_node,
fixed_frame_node,
rviz_node
])
# example.launch.py
import os
from ament_index_python import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.actions import IncludeLaunchDescription
from launch.actions import GroupAction
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration
from launch.substitutions import TextSubstitution
from launch_ros.actions import Node
from launch_ros.actions import PushRosNamespace
def generate_launch_description():
# args that can be set from the command line or a default will be used
background_r_launch_arg = DeclareLaunchArgument(
"background_r", default_value=TextSubstitution(text="0")
)
background_g_launch_arg = DeclareLaunchArgument(
"background_g", default_value=TextSubstitution(text="255")
)
background_b_launch_arg = DeclareLaunchArgument(
"background_b", default_value=TextSubstitution(text="0")
)
chatter_ns_launch_arg = DeclareLaunchArgument(
"chatter_ns", default_value=TextSubstitution(text="my/chatter/ns")
)
# include another launch file
launch_include = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(
get_package_share_directory('demo_nodes_cpp'),
'launch/topics/talker_listener.launch.py'))
)
# include another launch file in the chatter_ns namespace
launch_include_with_namespace = GroupAction(
actions=[
# push-ros-namespace to set namespace of included nodes
PushRosNamespace(LaunchConfiguration('chatter_ns')),
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(
get_package_share_directory('demo_nodes_cpp'),
'launch/topics/talker_listener.launch.py'))
),
]
)
# start a turtlesim_node in the turtlesim1 namespace
turtlesim_node = Node(
package='turtlesim',
namespace='turtlesim1',
executable='turtlesim_node',
name='sim'
)
# start another turtlesim_node in the turtlesim2 namespace
# and use args to set parameters
turtlesim_node_with_parameters = Node(
package='turtlesim',
namespace='turtlesim2',
executable='turtlesim_node',
name='sim',
parameters=[{
"background_r": LaunchConfiguration('background_r'),
"background_g": LaunchConfiguration('background_g'),
"background_b": LaunchConfiguration('background_b'),
}]
)
# perform remap so both turtles listen to the same command topic
forward_turtlesim_commands_to_second_turtlesim_node = Node(
package='turtlesim',
executable='mimic',
name='mimic',
remappings=[
('/input/pose', '/turtlesim1/turtle1/pose'),
('/output/cmd_vel', '/turtlesim2/turtle1/cmd_vel'),
]
)
return LaunchDescription([
background_r_launch_arg,
background_g_launch_arg,
background_b_launch_arg,
chatter_ns_launch_arg,
launch_include,
launch_include_with_namespace,
turtlesim_node,
turtlesim_node_with_parameters,
forward_turtlesim_commands_to_second_turtlesim_node,
])
临时添加parameters的方法
parameters=[{
"background_r": LaunchConfiguration('background_r'),
"background_g": LaunchConfiguration('background_g'),
"background_b": LaunchConfiguration('background_b'),
}]
parameters=[{'use_sim_time': use_sim_time},
{'autostart': autostart},
{'node_names': lifecycle_nodes}
])
turtlebot3启动导航的launch文件
存放路径:turtlebot3/turtlebot3_navigation2/launch/navigation2.launch.py
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
TURTLEBOT3_MODEL = os.environ['TURTLEBOT3_MODEL']
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
map_dir = LaunchConfiguration(
'map',
default=os.path.join(
get_package_share_directory('turtlebot3_navigation2'),
'map',
'map.yaml'))
param_file_name = TURTLEBOT3_MODEL + '.yaml'
param_dir = LaunchConfiguration(
'params_file',
default=os.path.join(
get_package_share_directory('turtlebot3_navigation2'),
'param',
param_file_name))
nav2_launch_file_dir = os.path.join(get_package_share_directory('nav2_bringup'), 'launch')
rviz_config_dir = os.path.join(
get_package_share_directory('nav2_bringup'),
'rviz',
'nav2_default_view.rviz')
return LaunchDescription([
DeclareLaunchArgument(
'map',
default_value=map_dir,
description='Full path to map file to load'),
DeclareLaunchArgument(
'params_file',
default_value=param_dir,
description='Full path to param file to load'),
DeclareLaunchArgument(
'use_sim_time',
default_value='false',
description='Use simulation (Gazebo) clock if true'),
IncludeLaunchDescription(
PythonLaunchDescriptionSource([nav2_launch_file_dir, '/bringup_launch.py']),
launch_arguments={
'map': map_dir,
'use_sim_time': use_sim_time,
'params_file': param_dir}.items(),
),
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
output='screen'),
])
turtlebot3启动建图
存放路径:turtlebot3/turtlebot3_cartographer/launch/cartographer.launch.py
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch_ros.actions import Node
from launch.substitutions import LaunchConfiguration
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import ThisLaunchFileDir
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
turtlebot3_cartographer_prefix = get_package_share_directory('turtlebot3_cartographer')
cartographer_config_dir = LaunchConfiguration('cartographer_config_dir', default=os.path.join(
turtlebot3_cartographer_prefix, 'config'))
configuration_basename = LaunchConfiguration('configuration_basename',
default='turtlebot3_lds_2d.lua')
resolution = LaunchConfiguration('resolution', default='0.05')
publish_period_sec = LaunchConfiguration('publish_period_sec', default='1.0')
rviz_config_dir = os.path.join(get_package_share_directory('turtlebot3_cartographer'),
'rviz', 'tb3_cartographer.rviz')
return LaunchDescription([
DeclareLaunchArgument(
'cartographer_config_dir',
default_value=cartographer_config_dir,
description='Full path to config file to load'),
DeclareLaunchArgument(
'configuration_basename',
default_value=configuration_basename,
description='Name of lua file for cartographer'),
DeclareLaunchArgument(
'use_sim_time',
default_value='false',
description='Use simulation (Gazebo) clock if true'),
Node(
package='cartographer_ros',
executable='cartographer_node',
name='cartographer_node',
output='screen',
parameters=[{'use_sim_time': use_sim_time}],
arguments=['-configuration_directory', cartographer_config_dir,
'-configuration_basename', configuration_basename]),
DeclareLaunchArgument(
'resolution',
default_value=resolution,
description='Resolution of a grid cell in the published occupancy grid'),
DeclareLaunchArgument(
'publish_period_sec',
default_value=publish_period_sec,
description='OccupancyGrid publishing period'),
IncludeLaunchDescription(
PythonLaunchDescriptionSource([ThisLaunchFileDir(), '/occupancy_grid.launch.py']),
launch_arguments={'use_sim_time': use_sim_time, 'resolution': resolution,
'publish_period_sec': publish_period_sec}.items(),
),
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
output='screen'),
])
Navigation2启动定位程序
路径:navigation2/nav2_bringup/bringup/launch/localization_launch.py
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument, SetEnvironmentVariable
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
from nav2_common.launch import RewrittenYaml
def generate_launch_description():
# Get the launch directory
bringup_dir = get_package_share_directory('nav2_bringup')
namespace = LaunchConfiguration('namespace')
map_yaml_file = LaunchConfiguration('map')
use_sim_time = LaunchConfiguration('use_sim_time')
autostart = LaunchConfiguration('autostart')
params_file = LaunchConfiguration('params_file')
lifecycle_nodes = ['map_server', 'amcl']
# Map fully qualified names to relative ones so the node's namespace can be prepended.
# In case of the transforms (tf), currently, there doesn't seem to be a better alternative
# https://github.com/ros/geometry2/issues/32
# https://github.com/ros/robot_state_publisher/pull/30
# TODO(orduno) Substitute with `PushNodeRemapping`
# https://github.com/ros2/launch_ros/issues/56
remappings = [('/tf', 'tf'),
('/tf_static', 'tf_static')]
# Create our own temporary YAML files that include substitutions
param_substitutions = {
'use_sim_time': use_sim_time,
'yaml_filename': map_yaml_file}
configured_params = RewrittenYaml(
source_file=params_file,
root_key=namespace,
param_rewrites=param_substitutions,
convert_types=True)
return LaunchDescription([
# Set env var to print messages to stdout immediately
SetEnvironmentVariable('RCUTILS_LOGGING_BUFFERED_STREAM', '1'),
DeclareLaunchArgument(
'namespace', default_value='',
description='Top-level namespace'),
DeclareLaunchArgument(
'map',
default_value=os.path.join(bringup_dir, 'maps', 'turtlebot3_world.yaml'),
description='Full path to map yaml file to load'),
DeclareLaunchArgument(
'use_sim_time', default_value='false',
description='Use simulation (Gazebo) clock if true'),
DeclareLaunchArgument(
'autostart', default_value='true',
description='Automatically startup the nav2 stack'),
DeclareLaunchArgument(
'params_file',
default_value=os.path.join(bringup_dir, 'params', 'nav2_params.yaml'),
description='Full path to the ROS2 parameters file to use'),
Node(
package='nav2_map_server',
executable='map_server',
name='map_server',
output='screen',
parameters=[configured_params],
remappings=remappings),
Node(
package='nav2_amcl',
executable='amcl',
name='amcl',
output='screen',
parameters=[configured_params],
remappings=remappings),
Node(
package='nav2_lifecycle_manager',
executable='lifecycle_manager',
name='lifecycle_manager_localization',
output='screen',
parameters=[{'use_sim_time': use_sim_time},
{'autostart': autostart},
{'node_names': lifecycle_nodes}])
])
参考:
Creating a launch file ‒ ROS 2 Documentation: Galactic documentation
Launching/monitoring multiple nodes with Launch ‒ ROS 2 Documentation: Galactic documentation
Using ROS 2 launch for large projects ‒ ROS 2 Documentation: Galactic documentation
Using substitutions in launch files ‒ ROS 2 Documentation: Galactic documentation
Using event handlers in launch files ‒ ROS 2 Documentation: Galactic documentation
多节点进程
示例代码仓库:
git clone https://gitee.com/shoufei/ros2_galactic_turorials.git
在同一个进程中运行多个节点,节点间的通信实现零拷贝。
下面的命令可以演示这个过程
ros2 run intra_process_demo two_node_pipeline
示例源码可以在这里查看ros2_galactic_turorials/demos/intra_process_demo/src/two_node_pipeline
#include <chrono>
#include <cinttypes>
#include <cstdio>
#include <memory>
#include <string>
#include <utility>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/int32.hpp"
using namespace std::chrono_literals;
// Node that produces messages.
struct Producer : public rclcpp::Node
{
Producer(const std::string & name, const std::string & output)
: Node(name, rclcpp::NodeOptions().use_intra_process_comms(true))
{
// Create a publisher on the output topic.
pub_ = this->create_publisher<std_msgs::msg::Int32>(output, 10);
std::weak_ptr<std::remove_pointer<decltype(pub_.get())>::type> captured_pub = pub_;
// Create a timer which publishes on the output topic at ~1Hz.
auto callback = [captured_pub]() -> void {
auto pub_ptr = captured_pub.lock();
if (!pub_ptr) {
return;
}
static int32_t count = 0;
std_msgs::msg::Int32::UniquePtr msg(new std_msgs::msg::Int32());
msg->data = count++;
printf(
"Published message with value: %d, and address: 0x%" PRIXPTR "\n", msg->data,
reinterpret_cast<std::uintptr_t>(msg.get()));
pub_ptr->publish(std::move(msg));
};
timer_ = this->create_wall_timer(1s, callback);
}
rclcpp::Publisher<std_msgs::msg::Int32>::SharedPtr pub_;
rclcpp::TimerBase::SharedPtr timer_;
};
// Node that consumes messages.
struct Consumer : public rclcpp::Node
{
Consumer(const std::string & name, const std::string & input)
: Node(name, rclcpp::NodeOptions().use_intra_process_comms(true))
{
// Create a subscription on the input topic which prints on receipt of new messages.
sub_ = this->create_subscription<std_msgs::msg::Int32>(
input,
10,
[](std_msgs::msg::Int32::UniquePtr msg) {
printf(
" Received message with value: %d, and address: 0x%" PRIXPTR "\n", msg->data,
reinterpret_cast<std::uintptr_t>(msg.get()));
});
}
rclcpp::Subscription<std_msgs::msg::Int32>::SharedPtr sub_;
};
int main(int argc, char * argv[])
{
setvbuf(stdout, NULL, _IONBF, BUFSIZ);
rclcpp::init(argc, argv);
rclcpp::executors::SingleThreadedExecutor executor;
auto producer = std::make_shared<Producer>("producer", "number");
auto consumer = std::make_shared<Consumer>("consumer", "number");
executor.add_node(producer);
executor.add_node(consumer);
executor.spin();
rclcpp::shutdown();
return 0;
}
一个进程多个线程分别运行不同节点
ros2 run examples_rclcpp_multithreaded_executor multithreaded_executor
示例源码可以在这里查看/ros2_galactic_turorials/examples/rclcpp/executors/multithreaded_executor
#include <chrono>
#include <functional>
#include <memory>
#include <string>
#include <thread>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
/**
* A small convenience function for converting a thread ID to a string
**/
std::string string_thread_id()
{
auto hashed = std::hash<std::thread::id>()(std::this_thread::get_id());
return std::to_string(hashed);
}
/* For this example, we will be creating a publishing node like the one in minimal_publisher.
* We will have a single subscriber node running 2 threads. Each thread loops at different speeds, and
* just repeats what it sees from the publisher to the screen.
*/
class PublisherNode : public rclcpp::Node
{
public:
PublisherNode()
: Node("PublisherNode"), count_(0)
{
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
auto timer_callback =
[this]() -> void {
auto message = std_msgs::msg::String();
message.data = "Hello World! " + std::to_string(this->count_++);
// Extract current thread
auto curr_thread = string_thread_id();
// Prep display message
RCLCPP_INFO(
this->get_logger(), "\n<<THREAD %s>> Publishing '%s'",
curr_thread.c_str(), message.data.c_str());
this->publisher_->publish(message);
};
timer_ = this->create_wall_timer(500ms, timer_callback);
}
private:
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;
};
class DualThreadedNode : public rclcpp::Node
{
public:
DualThreadedNode()
: Node("DualThreadedNode")
{
/* These define the callback groups
* They don't really do much on their own, but they have to exist in order to
* assign callbacks to them. They're also what the executor looks for when trying to run multiple threads
*/
callback_group_subscriber1_ = this->create_callback_group(
rclcpp::CallbackGroupType::MutuallyExclusive);
callback_group_subscriber2_ = this->create_callback_group(
rclcpp::CallbackGroupType::MutuallyExclusive);
// Each of these callback groups is basically a thread
// Everything assigned to one of them gets bundled into the same thread
auto sub1_opt = rclcpp::SubscriptionOptions();
sub1_opt.callback_group = callback_group_subscriber1_;
auto sub2_opt = rclcpp::SubscriptionOptions();
sub2_opt.callback_group = callback_group_subscriber2_;
subscription1_ = this->create_subscription<std_msgs::msg::String>(
"topic",
rclcpp::QoS(10),
// std::bind is sort of C++'s way of passing a function
// If you're used to function-passing, skip these comments
std::bind(
&DualThreadedNode::subscriber1_cb, // First parameter is a reference to the function
this, // What the function should be bound to
std::placeholders::_1), // At this point we're not positive of all the
// parameters being passed
// So we just put a generic placeholder
// into the binder
// (since we know we need ONE parameter)
sub1_opt); // This is where we set the callback group.
// This subscription will run with callback group subscriber1
subscription2_ = this->create_subscription<std_msgs::msg::String>(
"topic",
rclcpp::QoS(10),
std::bind(
&DualThreadedNode::subscriber2_cb,
this,
std::placeholders::_1),
sub2_opt);
}
private:
/**
* Simple function for generating a timestamp
* Used for somewhat ineffectually demonstrating that the multithreading doesn't cripple performace
*/
std::string timing_string()
{
rclcpp::Time time = this->now();
return std::to_string(time.nanoseconds());
}
/**
* Every time the Publisher publishes something, all subscribers to the topic get poked
* This function gets called when Subscriber1 is poked (due to the std::bind we used when defining it)
*/
void subscriber1_cb(const std_msgs::msg::String::SharedPtr msg)
{
auto message_received_at = timing_string();
// Extract current thread
RCLCPP_INFO(
this->get_logger(), "THREAD %s => Heard '%s' at %s",
string_thread_id().c_str(), msg->data.c_str(), message_received_at.c_str());
}
/**
* This function gets called when Subscriber2 is poked
* Since it's running on a separate thread than Subscriber 1, it will run at (more-or-less) the same time!
*/
void subscriber2_cb(const std_msgs::msg::String::SharedPtr msg)
{
auto message_received_at = timing_string();
// Prep display message
RCLCPP_INFO(
this->get_logger(), "THREAD %s => Heard '%s' at %s",
string_thread_id().c_str(), msg->data.c_str(), message_received_at.c_str());
}
rclcpp::CallbackGroup::SharedPtr callback_group_subscriber1_;
rclcpp::CallbackGroup::SharedPtr callback_group_subscriber2_;
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription1_;
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription2_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
// You MUST use the MultiThreadedExecutor to use, well, multiple threads
rclcpp::executors::MultiThreadedExecutor executor;
auto pubnode = std::make_shared<PublisherNode>();
auto subnode = std::make_shared<DualThreadedNode>(); // This contains BOTH subscriber callbacks.
// They will still run on different threads
// One Node. Two callbacks. Two Threads
executor.add_node(pubnode);
executor.add_node(subnode);
executor.spin();
rclcpp::shutdown();
return 0;
}
一个进程多个线程,每个线程运行不同节点,并设置每个线程的优先级和占用哪个CPU
ros2 run examples_rclcpp_cbg_executor ping_pong
示例源码可以在这里查看/ros2_galactic_turorials/examples/rclcpp/executors/cbg_executor/src
#include <cinttypes>
#include <cstdlib>
#include <ctime>
#include <chrono>
#include <condition_variable>
#include <functional>
#include <iostream>
#include <memory>
#include <mutex>
#include <string>
#include <thread>
#include <vector>
#include "rclcpp/executor.hpp"
#include "rclcpp/rclcpp.hpp"
#include "examples_rclcpp_cbg_executor/ping_node.hpp"
#include "examples_rclcpp_cbg_executor/pong_node.hpp"
#include "examples_rclcpp_cbg_executor/utilities.hpp"
using std::chrono::seconds;
using std::chrono::milliseconds;
using std::chrono::nanoseconds;
using namespace std::chrono_literals;
using examples_rclcpp_cbg_executor::PingNode;
using examples_rclcpp_cbg_executor::PongNode;
using examples_rclcpp_cbg_executor::configure_thread;
using examples_rclcpp_cbg_executor::get_thread_time;
using examples_rclcpp_cbg_executor::ThreadPriority;
/// The main function composes a Ping node and a Pong node in one OS process
/// and runs the experiment. See README.md for an architecture diagram.
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
// Create two executors within this process.
rclcpp::executors::SingleThreadedExecutor high_prio_executor;
rclcpp::executors::SingleThreadedExecutor low_prio_executor;
// Create Ping node instance and add it to high-prio executor.
auto ping_node = std::make_shared<PingNode>();
high_prio_executor.add_node(ping_node);
// Create Pong node instance and add it the one of its callback groups
// to the high-prio executor and the other to the low-prio executor.
auto pong_node = std::make_shared<PongNode>();
high_prio_executor.add_callback_group(
pong_node->get_high_prio_callback_group(), pong_node->get_node_base_interface());
low_prio_executor.add_callback_group(
pong_node->get_low_prio_callback_group(), pong_node->get_node_base_interface());
rclcpp::Logger logger = pong_node->get_logger();
// Create a thread for each of the two executors ...
auto high_prio_thread = std::thread(
[&]() {
high_prio_executor.spin();
});
auto low_prio_thread = std::thread(
[&]() {
low_prio_executor.spin();
});
// ... and configure them accordinly as high and low prio and pin them to the
// first CPU. Hence, the two executors compete about this computational resource.
const int CPU_ZERO = 0;
bool ret = configure_thread(high_prio_thread, ThreadPriority::HIGH, CPU_ZERO);
if (!ret) {
RCLCPP_WARN(logger, "Failed to configure high priority thread, are you root?");
}
ret = configure_thread(low_prio_thread, ThreadPriority::LOW, CPU_ZERO);
if (!ret) {
RCLCPP_WARN(logger, "Failed to configure low priority thread, are you root?");
}
// Creating the threads immediately started them.
// Therefore, get start CPU time of each thread now.
nanoseconds high_prio_thread_begin = get_thread_time(high_prio_thread);
nanoseconds low_prio_thread_begin = get_thread_time(low_prio_thread);
const std::chrono::seconds EXPERIMENT_DURATION = 10s;
RCLCPP_INFO_STREAM(
logger, "Running experiment from now on for " << EXPERIMENT_DURATION.count() << " seconds ...");
std::this_thread::sleep_for(EXPERIMENT_DURATION);
// Get end CPU time of each thread ...
nanoseconds high_prio_thread_end = get_thread_time(high_prio_thread);
nanoseconds low_prio_thread_end = get_thread_time(low_prio_thread);
// ... and stop the experiment.
rclcpp::shutdown();
high_prio_thread.join();
low_prio_thread.join();
ping_node->print_statistics(EXPERIMENT_DURATION);
// Print CPU times.
int64_t high_prio_thread_duration_ms = std::chrono::duration_cast<milliseconds>(
high_prio_thread_end - high_prio_thread_begin).count();
int64_t low_prio_thread_duration_ms = std::chrono::duration_cast<milliseconds>(
low_prio_thread_end - low_prio_thread_begin).count();
RCLCPP_INFO(
logger, "High priority executor thread ran for %" PRId64 "ms.", high_prio_thread_duration_ms);
RCLCPP_INFO(
logger, "Low priority executor thread ran for %" PRId64 "ms.", low_prio_thread_duration_ms);
return 0;
}
https://docs.ros.org/en/galactic/Tutorials/Intra-Process-Communication.html
觉得有用就点赞吧!
我是首飞,一个帮大家填坑的机器人开发攻城狮。
另外在公众号《首飞》内回复“机器人”获取精心推荐的C/C++,Python,Docker,Qt,ROS1/2等机器人行业常用技术资料。
文章出处登录后可见!