用于处理、评估和比较里程计和SLAM算法的轨迹输出。
evo是一款用于视觉里程计和slam问题的轨迹评估工具。核心功能是能够绘制相机的轨迹,或评估估计轨迹与真值的误差。支持多种数据集的轨迹格式(TUM、KITTI、EuRoC MAV、ROS的bag),同时支持这些数据格式之间进行相互转换。在此仅对其基本功能做简要介绍。
evo工具github地址:Home · MichaelGrupp/evo Wiki · GitHub
0 安装
安装方式极其简单,采用pip安装:
pip install evo --upgrade --no-binary evo或者通过github下载源码后(https://github.com/MichaelGrupp/evo),使用源码安装:
pip install –editable . –upgrade –no-binary evo
安装时会自动安装相关依赖项。
入门
① 基础指令
evo绘制轨迹的指令为:evo_traj,后跟必要参数有:数据的格式(tum/kitti/bag/euroc等)+ 轨迹文件。轨迹文件可以有多个,例如:
evo_traj tum traj1.txt traj2.txt这个指令只是显示轨迹的基本信息,若要绘制轨迹,则增加可选参数 -p 或 –plot
evo_traj tum traj1.txt –p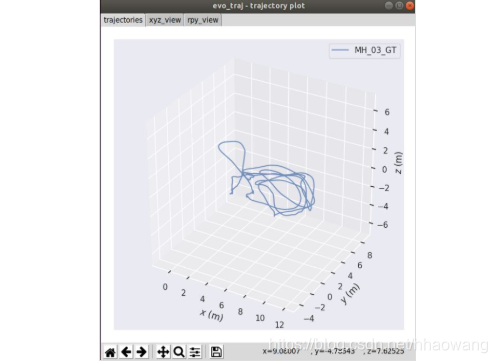
② 轨迹对齐
我们时常需要将估计轨迹与真实轨迹同时绘制,可采用指令:
evo_traj tum realTraj.txt estTraj.txt -p存储时轨迹多为相对位置变化,所以绘制出的轨迹在初始位置上存在一定的位置和角度偏移。
这时我们采用对齐指令将两条轨迹进行对齐。为此我们需要通过–ref参数指定参考轨迹,并增加参数-a(或–align)进行对齐(旋转与平移)
evo_traj tum estTraj.txt --ref realTraj.txt -p -a③ 轨迹尺度缩放
单目相机会存在尺度的不确定性,evo_traj 支持使用-s(或 –correct_scale)参数进行Sim(3)上的对齐(旋转、平移与尺度缩放)
可以在命令行通过-h参数查看当前evo指令的参数及相关说明。例如:
evo_traj tum –h
1 精度测评
1.1 ape与rpe
evo_ape 绝对位姿误差(absolute pose error),用于整体评估整条轨迹的全局一致性;
evo_rpe 相对位姿误差(relativeposeerror),用于评价轨迹局部的准确性。
1.2 evo_traj的可选参数
轨迹对齐-a与尺度缩放-s,若增加可选参数-p,可以绘制误差相关曲线:
evo_ape tum realTraj.txt estTraj.txt -a –s -p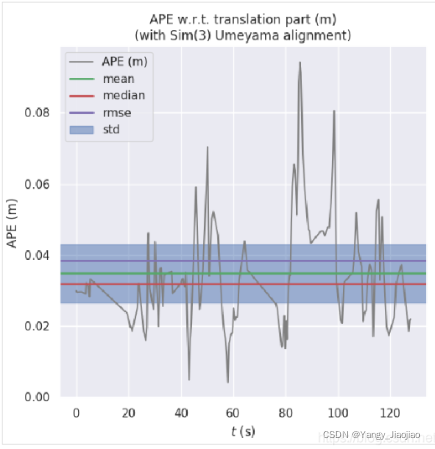
注意:在进行评估时,若经过了缩放,在命令行中应将真实轨迹(参考轨迹)放在估计轨迹(计算轨迹)前方,避免在缩放时参考轨迹错误而造成误差被错误缩放。
1.3 格式互相转换
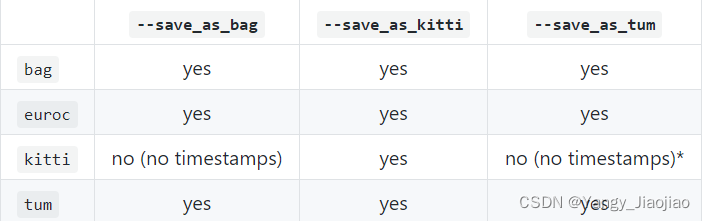
example1 EuRoC→TUM,输出为data.tum
evo_traj euroc data.csv --save_as_tum
example1 EuRoC→kitti,输出为data.kitti
evo_traj tum traj_1.txt traj_2.txt traj_3.txt --save_as_kitti2 轨迹绘图工具
evo_traj 用于分析、绘制或导出一个或多个轨迹的工具
evo_res 用于比较来自evo_ape或evo_rpe的一个或多个结果文件的工具
evo_fig (实验性)用于重新打开序列化绘图的工具(与–serialize_plot一起保存)
evo_config 用于全局设置和配置文件操作的工具
使用–help调用命令以查看选项,例如evo_ape –help。Tab命令行参数的完成在类UNIX系统上可用。
3 使用例程
3.1 evo_traj 绘制多条轨迹
evo_traj kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_00_gt.txt -p --plot_mode=xz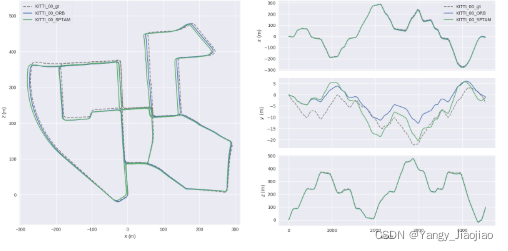
3.2 evo_ape 在轨迹上运行测评
例如,在这里,我们使用evo_ape(KITTI_00_gt.txt是参考(地面真相))计算ORB-SLAM和S-PTAM的两条轨迹的绝对姿态误差,并绘制并保存单个结果。evo_res的压缩文件:
First trajectory (ORB Stereo):
evo_ape kitti KITTI_00_gt.txt KITTI_00_ORB.txt -va --plot --plot_mode xz --save_results results/ORB.zip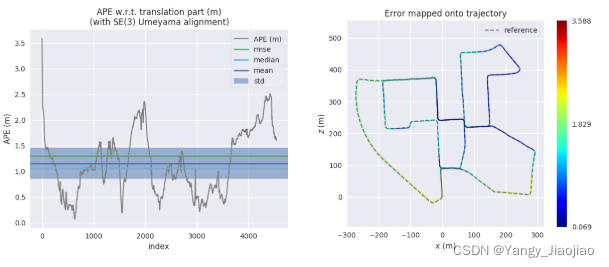
Second trajectory (S-PTAM):
evo_ape kitti KITTI_00_gt.txt KITTI_00_SPTAM.txt -va --plot --plot_mode xz --save_results results/SPTAM.zip 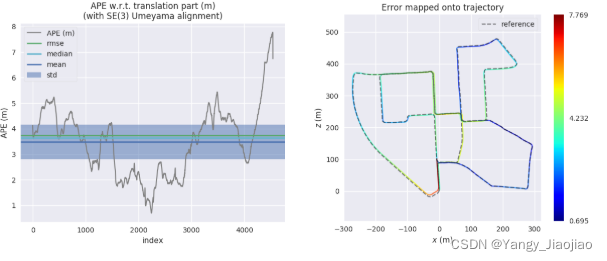
3.3 evo_res 从一个度量中处理多个结果
evo_res可用于比较指标中的多个结果文件,即:
打印信息和统计信息(默认)打印结果并将统计信息保存在表格中。在这里,我们使用上面的结果生成一个图和一个表:
evo_res results/*.zip -p --save_table results/table.csv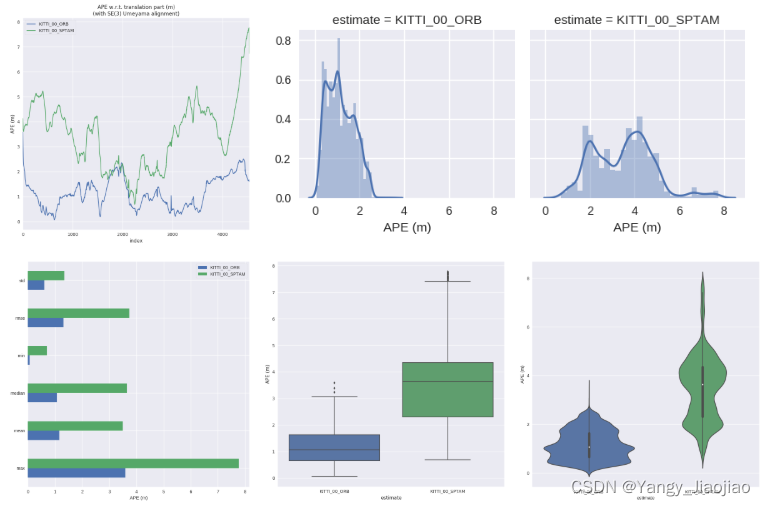
4 应用
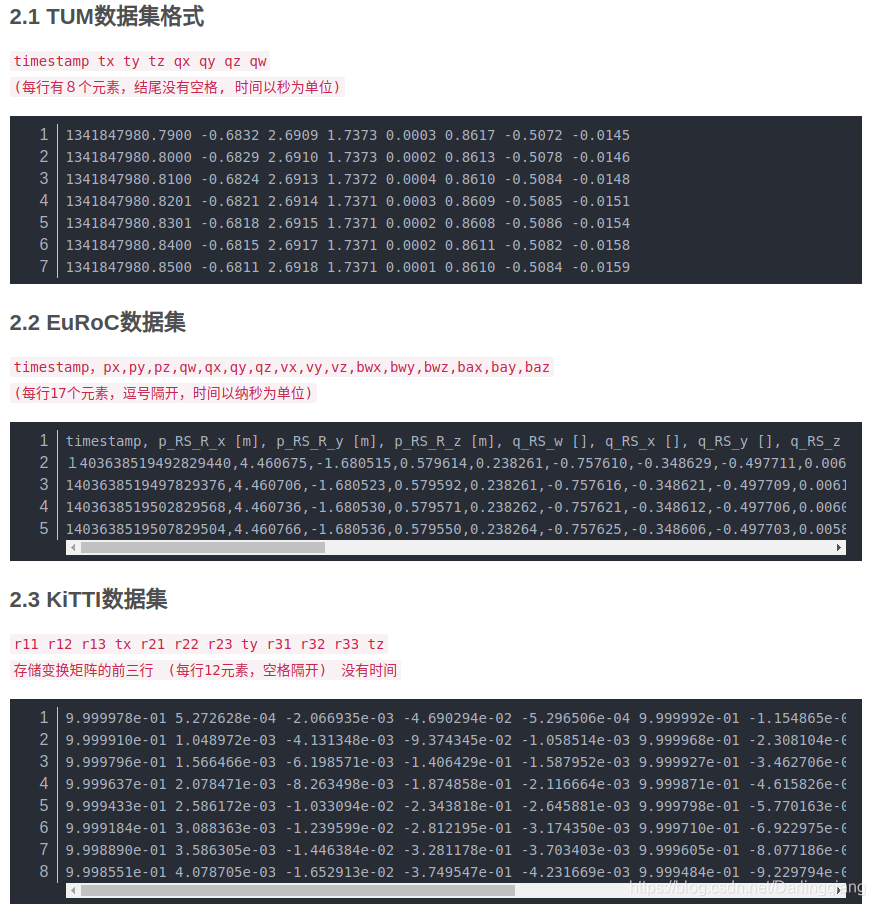
4.1 "把EuRoc的数据格式转化成TUM数据格式"
evo_traj euroc data.csv --save_as_tum将生成的 KeyFrameNavStateTrajectory.txt 文件,格式如下。总共17位 (timestamp;position3;q4;v3;bw3;ba3)

转化成符合TUM 形式的轨迹文件格式:8位
timestamp x y z q_x q_y q_z q_w![]()
evo_traj tum traj_1.txt traj_2.txt traj_3.txt --save_as_kitti- " 把一些文件的数据格式转化成rosbag"
evo_traj tum traj_1.txt traj_2.txt traj_3.txt --save_as_bag4.4. 轨迹对齐
当轨迹使用不同的传感器坐标系,或者轨迹之间有旋转平移等变换时,可以使用 "–align" 参数进行轨迹对齐, 使用 "–correct_scale"进行轨迹放缩。一个例子,如下面的命令所示。
注意:
- 这里对比的轨迹,应该具有相同数量的位姿(相同数量的行),当然也应该是相同数量的列(位姿的表示方法相同)
- 同时使用align参数,应该指定reference(即指定"–ref"参数)
-
evo_traj tum KeyFrameTrajectory.txt --ref=KITTI_02_gt.txt -p --plot_mode=xz --correct_scale --align
参考文献
https://github.com/MichaelGrupp/evo/wiki
GitHub – MichaelGrupp/evo: Python package for the evaluation of odometry and SLAM
文章出处登录后可见!