目录
坐标旋转数字计算机CORDIC(COordinate Rotation DIgital Computer)算法,通过移位和加减运算,能递归计算常用函数值,如Sin,Cos,Sinh,Cosh等函数,由J. Volder于1959年提出,首先用于导航系统,使得矢量的旋转和定向运算不需要做查三角函数表、乘法、开方及反三角函数等复杂运算。J. Walther在1974年用它研究了一种能计算出多种超越函数的统一算法。
坐标旋转分析
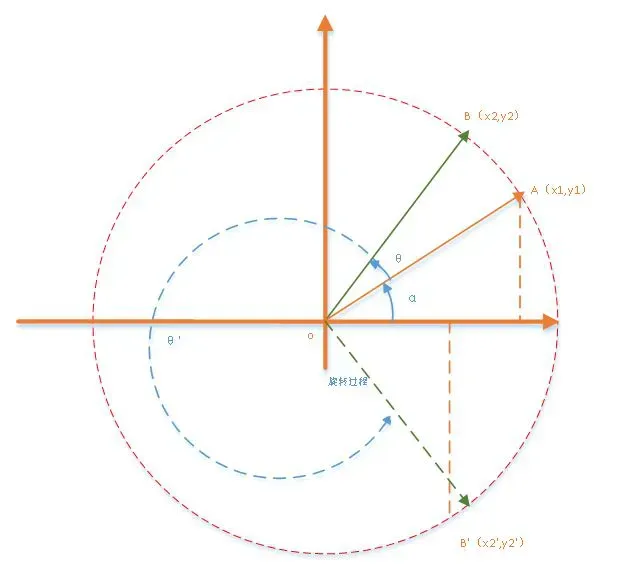
已知:OA逆时针旋转θ角度后得到OB,线段OA=OB,∠AOB=θ,A 点坐标(x1,y1),B 点坐标(x2,y2);
求证:x2=x1*cosθ – y1*sinθ;y2=x1*sinθ+ y1*cosθ
假设OA=OB=m;
假设点B在第一象限,
x1=m*cosα,y1=m*sinα。
x2=m*cos(α+θ)=m*(cosαcosθ- sinαsinθ)
=m*(cosαcosθ- cosαtanαsinθ)
=m*cosα*(cosθ- tanαsinθ)
=x1*(cosθ- tanαsinθ)
=x1*cosθ-x1* tanαsinθ
=x1*cosθ-y1* sinθ
y2=m*sin(α+θ)=m*(sinαcosθ+ cosαsinθ)
=m*sinαcosθ+ m*cosαsinθ)
=y1cosθ+x1sinθ
假设点B在第四象限,
x1=m*cosα,y1=m*sinα。
x2=m*cos(360°-(θ+α))=m*cos(-(α+θ))=
=m*cos(α+θ)=m*(cosαcosθ- sinαsinθ)
=m*(cosαcosθ- cosαtanαsinθ)
=m*cosα*(cosθ- tanαsinθ)
=x1*(cosθ- tanαsinθ)
=x1*cosθ-x1* tanαsinθ
=x1*cosθ-y1* sinθ
y2=-m*sin(360°-(θ+α))=-m*sin(-(θ+α))
=m*sin(α+θ)=m*(sinαcosθ+ cosαsinθ)
=m*sinαcosθ+ m*cosαsinθ)
=y1cosθ+x1sinθ
同理,无论A在第几象限,B旋转到第几象限,公式都成立。
Cordic算法原理
将坐标关系写成矩阵形式:
![]()
继续旋转第二次:
![]()
旋转第i次:
![]()
提取出cosθ便得到了初步的cordic算法公式:
![]()
如果将上式中的cosθ忽略掉,则称该旋转过程为伪旋转,角度正确,但是模长变化,即:
![]()
由于硬件比较容易通过移位实现2的乘法与除法,我们固定取第i次(从0开始计数)旋转的角度为![]() ,也就是
,也就是![]()
参考下表,一般设置旋转16次,既可以认为得到比较精准的逼近值。
| 第i次旋转 | tanθi | 角度 | 旋转弧度 |
| 0 | 2^-0 | 45° | 0.78539 |
| 1 | 2^-1 | 26.565° | 0.46365 |
| 2 | 2^-2 | 14.036° | 0.24498 |
| 3 | 2^-3 | 7.1250° | 0.12435 |
| 4 | 2^-4 | 3.5763° | 0.06241 |
| 5 | 2^-5 | 1.7899° | 0.03123 |
| 6 | 2^-6 | 0.8951° | 0.01562 |
| 7 | 2^-7 | 0.4476° | 0.00781 |
| 8 | 2^-8 | 0.2238° | 0.00391 |
| 9 | 2^-9 | 0.1119° | 0.00195 |
| 10 | 2^-10 | 0.0559° | 0.00098 |
| 11 | 2^-11 | 0.0279° | 0.00049 |
| 12 | 2^-12 | 0.0139° | 0.00024 |
| 13 | 2^-13 | 0.0069° | 0.00012 |
| 14 | 2^-14 | 0.0035° | 0.00006 |
| 15 | 2^-15 | 0.0017° | 0.00003 |
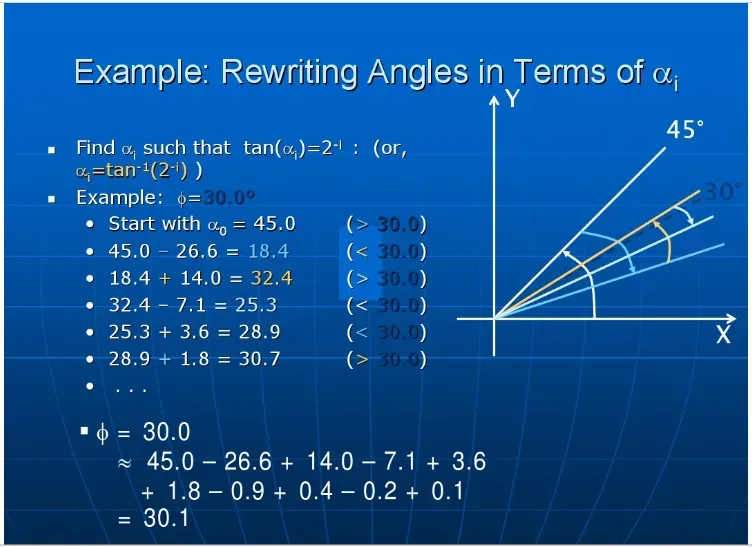
Cordic 算法的思想是通过迭代的方法,不断的旋转特定的角度,使得累计旋转的角度无限接近某一设定的角度,每次旋转的角度的θ = arctan( 1/(2^n) );
以目标角度α=30°为例,可以经过如下迭代得到:
应用举例1:求sin值与cos值
当z(0)=30°时,计算sin z(0),cos z(0).
迭代计算方法如下表,其中z(i)表示第i次迭代前和目标角度的差值;di表示z(i)的正负;θ(i)表示第i次迭代发生旋转的角度;y(i)为第i次迭代前的纵坐标;x(i)为第i次迭代前的横坐标;
迭代过程中,根据下式计算x(i+1)与y(i+1)的值,tanθ直接调用上一节表格中的值进行计算。
![]()
迭代过程如下:
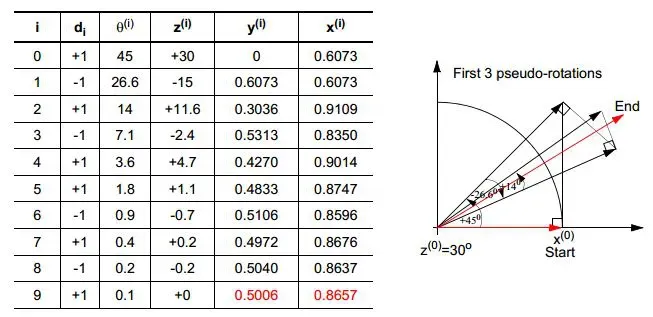
通过cordic算法后,得到sin30°=0.5006,cos30°=0.8657。
结果没有问题,但是x(0)为什么取0.6073呢?继续往下看吧~答案就在后面~
应用举例2:求反正切值
当y(0)=2,x(0)=1,求![]() .
.
z(i)表示第i次旋转前总共旋转的角度;θ(i)表示第i次迭代发生旋转的角度;y(i)表示第i次旋转前的纵坐标;di表示θ(i)的正负方向,在下表中省略。
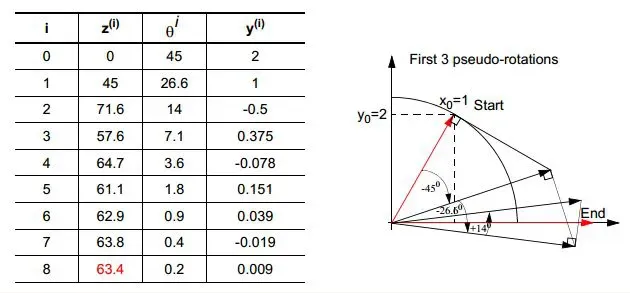
通过cordic算法后,得到![]() 。
。
cosθ的还原补偿
前面分析cosθ时讲到了伪旋转,每旋转1次,模长缩小了cosθi,我们如果最终须要恢复原有模长的话,就需要在最后的结果上乘以补偿系数An。
设Ai为第i次旋转的补偿系数,,根据三角函数及勾股定理可得:
![]()
补偿因子An:
![]()
旋转的次数越多,旋转的角度趋近于0°,Ai趋近于1,经过计算,当n趋于无穷大时,An趋近于0.607252935。
即,当i趋于无穷大时:
![]()
文章出处登录后可见!