标准D-H参数(SDH)
关节角:绕
轴,
旋转到
的角度;
偏置距离:沿
轴,
移动到
连杆长度:从
轴,
移动到
的距离;
连杆扭角:绕
轴,
旋转到
的角度;
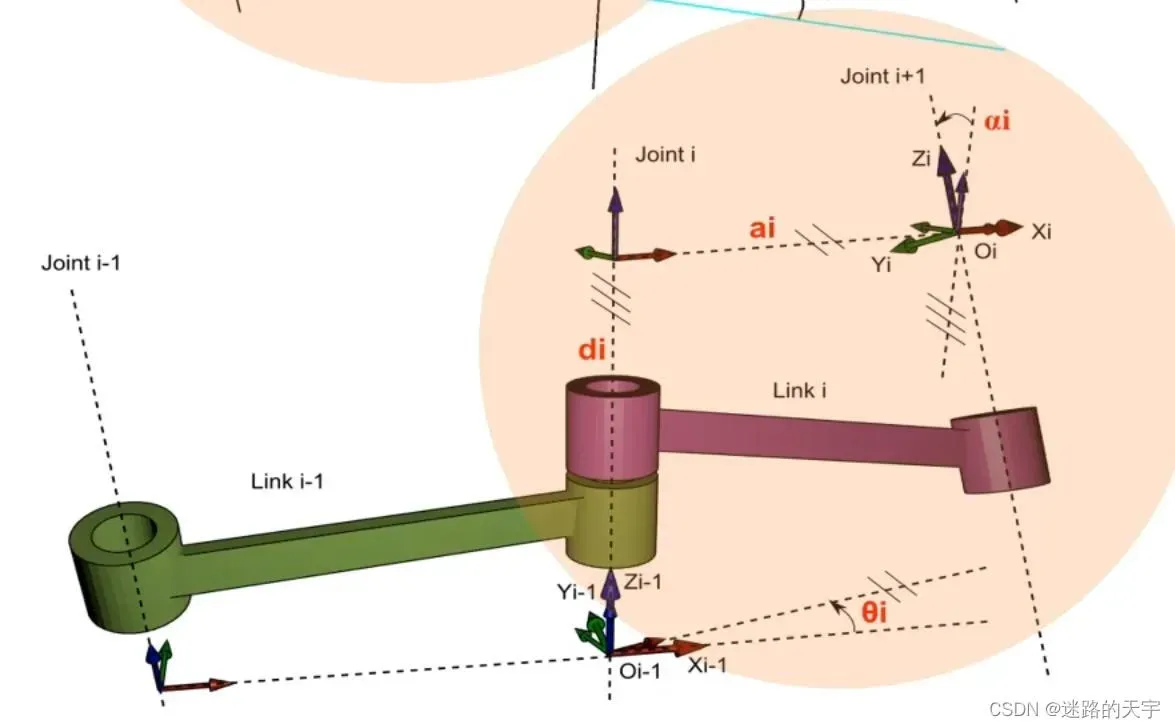
1、坐标系的建立
对于连杆i – 1,首先将连杆i – 1的远端轴线(即关节轴i)作为轴,关节轴i – 1与i轴的公垂线作为
轴,右手定则确定
轴。
2、坐标变换顺序
轴绕
轴旋转
角度,
沿
轴移动
,
沿
轴移动
,
轴绕
轴旋转
角度。
通过以上变换就可以将坐标系O(i – 1)转换到O(i)。
变换顺序可简写为:
其中和d可以调换顺序,因为都是相对于z轴在做变换;同理
和a也可以调换顺序,因为都是箱规与x轴在做变换。
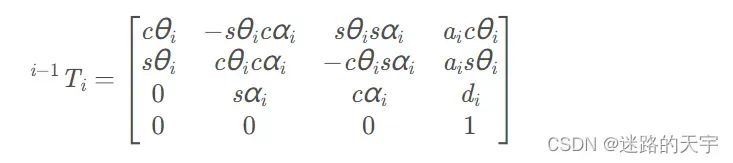
3、连杆变换矩阵
通过依次右乘四个运动矩阵就可得到变换矩阵:


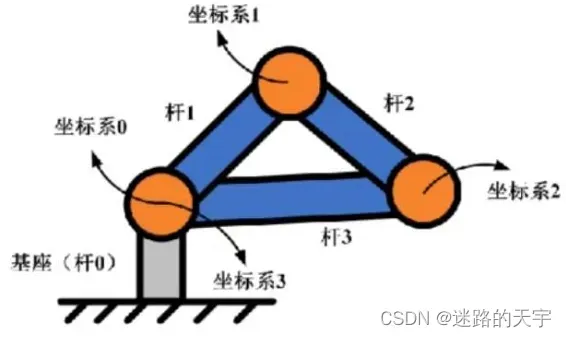
改进型D-H参数(MDH)
连杆长度:从
轴,
移动到
的距离;
连杆扭角:绕
轴,
旋转到
的角度;
关节角:绕
轴,
旋转到
的角度;
偏置距离:沿
轴,
移动到
的距离;
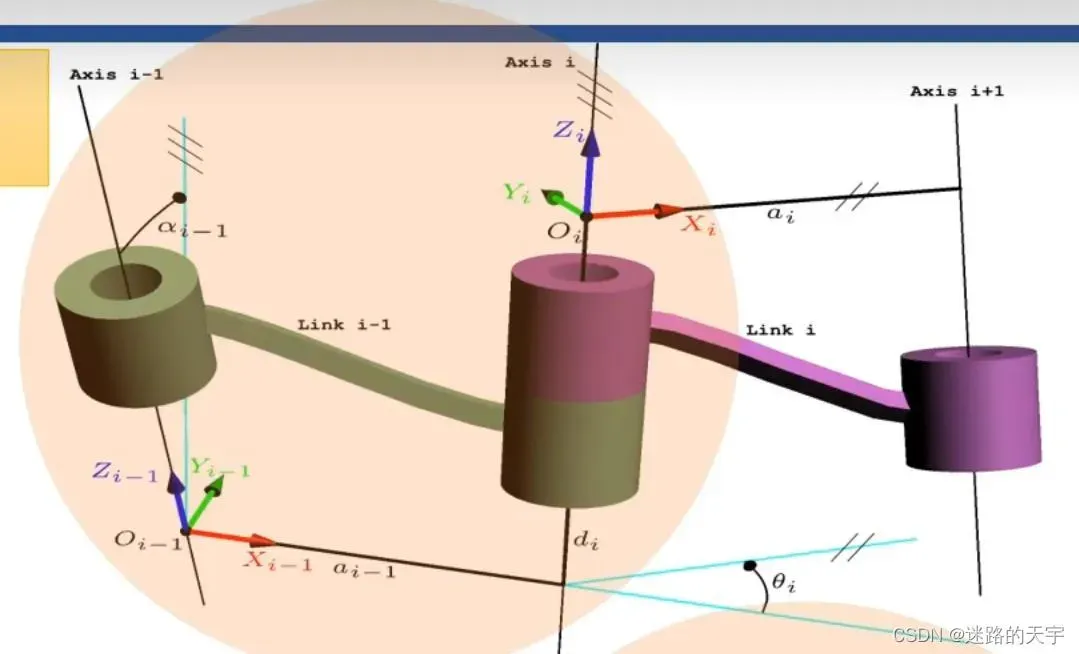
1、坐标系的建立
对于连杆i – 1,首先将连杆i – 1的近端轴线(即关节轴i)作为轴,关节轴i – 1与i轴的公垂线作为
轴,右手定则确定
轴。
2、坐标变换顺序
轴绕
轴旋转
角度,使
轴与
轴同向,
沿
轴移动
,
轴绕
轴旋转
角度,
沿
轴移动
。
通过以上变换就可以将坐标系O(i – 1)转换到O(i)。
变换顺序可简写为:
其中和a可以调换顺序,因为都是相对与x轴在做变换;
和d也可以调换顺序,因为都是相对于z轴在做变换。
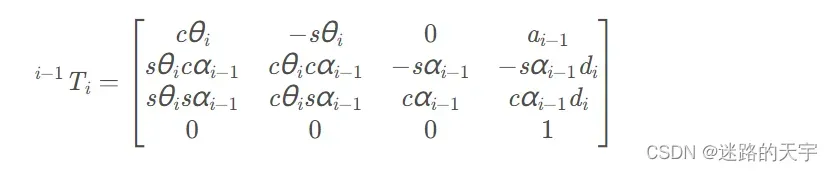
3、连杆变换矩阵
通过依次右乘四个运动矩阵就可得到变换矩阵:


MDH和DH的变换顺序
1、在连续变换的条件下,任意平移的顺序可互换;
2、在连续变换条件下,同一轴的旋转和平移可互换。
两种方法的主要区别
| 改进DH法 | 标准DH法 | |
| 坐标系在连杆 | 近端 | 远端 |
| 变换顺序 | XZ | ZX |
| 处理闭环结构 | 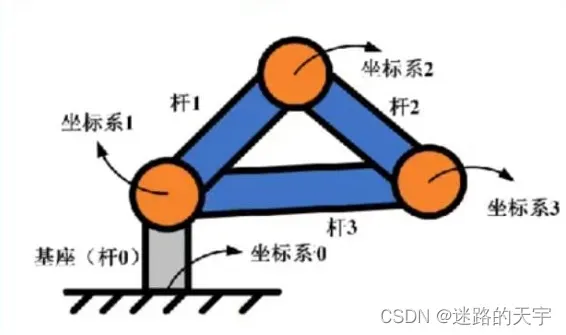 |
 |
标准DH和改进型DH参数表的相互转换
| 标准DH | ||||
| 关节1 | -pi/2 | 0 | 0 | |
| 关节2 | 0 | 360 | 0 | |
| 关节3 | -pi/2 | 303 | 120 | |
| 关节4 | pi/2 | 0 | 115 | |
| 关节5 | -pi/2 | 0 | 0 | |
| 关节6 | 0 | 0 | 0 | |
| 改进DH | ||||
| 关节1 | 0 | 0 | 0 | |
| 关节2 | -pi/2 | 0 | 0 | |
| 关节3 | 0 | 360 | 120 | |
| 关节4 | -pi/2 | 303 | 115 | |
| 关节5 | pi/2 | 0 | 0 | |
| 关节6 | -pi/2 | 0 | 0 | |
版权声明:本文为博主作者:迷路的天宇原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/weixin_62891964/article/details/126839894