文章目录
-
- 引言
- 定义
- 基本原理及公式推导
-
- RRT*算法的基本原理
- 公式推导和变量解释
- 特性
- 代码示例
-
- Python代码
- 代码运行结果
- 应用案例
- 优化和挑战
-
- 优化方面
- 面临的挑战
- 总结
引言
RRT*(Rapidly-exploring Random Trees Star)算法是一种用于高效路径规划的算法,特别适用于复杂或约束性的环境中。作为RRT(Rapidly-exploring Random Trees)的改进版本,RRT*不仅继承了RRT的高效探索性质,还引入了优化路径的功能,使得最终的路径成本趋于最优。
定义
RRT* 算法是一种用于寻找高维空间中最优路径的算法。它在标准RRT的基础上引入了路径成本的概念,并通过最小化该成本来提升路径质量。算法以一种随机化的方式扩展搜索树,每次迭代随机采样并尝试连接最近节点,如果新节点可以通过连接其他节点而降低到达其的总成本,则优化其在树中的位置。RRT* 通过不断迭代这一过程,渐进地向全局最优解收敛。该算法的核心优势是无需梯度信息,且具有处理复杂、非凸问题的能力,使其适用于机器人路径规划和自动驾驶等领域。
基本原理及公式推导
RRT*算法的基本原理
RRT*算法的目标是找到一条从起点到终点的近似最优路径。它通过迭代地扩展搜索树,并在过程中优化路径成本来实现这一目标。在每次迭代中,算法执行以下步骤:
-
随机采样:在搜索空间中随机选取一个新的点
,作为扩展树的候选方向。
-
节点选择:在树中找到一个已有节点
,使得它与新采样点
-
节点扩展:从
,这个新节点是向目标方向的一步扩展。
-
成本计算:计算从起点到
-
选择父节点:在
,并尝试将其中某些节点作为
-
更新树:如果通过
公式推导和变量解释
对于上述步骤4和5中涉及的成本计算和父节点选择,我们可以使用以下公式进行详细推导:
设为起点,搜索树中的每个节点
都有一个与之关联的成本
,它表示从
到
的最小已知路径成本。对于任意节点
,我们定义它的成本为:
其中,是
的父节点,
是节点
到节点
之间的欧几里得距离。
当我们考虑将新节点添加到树中时,我们首先确定一组邻域内的节点
,它们与
的距离小于一个预定的搜索半径
。对于每个
到
,我们计算通过
到
的成本,并选择使得成本最小的节点作为
的父节点:
选择父节点后,我们进一步检查是否可以通过将作为父节点来降低
中其他节点的成本。对于每个
,如果满足以下条件:
那么我们将的父节点更新为
,并更新相关成本:
这个过程反映了RRT* 算法中的关键创新——路径的持续优化,这也是它与原始RRT算法的主要区别。通过不断地重复上述步骤,RRT* 保证了搜索到的路径在足够的迭代后能够收敛至最优解,这一性质被称为渐近最优性。
特性
RRT*算法具有几个显著特性,使其在许多应用中成为首选的路径规划算法:
-
渐近最优性:
RRT*算法的一个关键特性是它能保证以概率收敛到全局最优解。这意味着随着迭代次数的增加,找到的路径会不断接近于最短可能路径。这种特性对于那些需要精确和高效路径规划的应用尤为重要。 -
无需梯度信息:
RRT*不需要目标函数的梯度信息,因此非常适合于那些目标函数不易或无法求导的应用,例如在未知环境中的导航。 -
高效的空间探索:
类似于其前身RRT,RRT*通过随机采样快速探索大型搜索空间。这种方法特别适用于处理高维度问题,比如机器人的多关节运动规划。 -
适用于复杂环境:
RRT能够适应复杂和动态变化的环境。无论是静态障碍物还是动态障碍物,RRT都能够有效地绕过它们,并找到安全的路径。 -
灵活性与可扩展性:
算法的结构使其易于根据不同应用的需求进行调整。可以通过改变参数(如搜索半径、步长)来优化算法性能或者通过集成先进的启发式来改进算法。 -
适应多种成本函数:
RRT*允许用户定义自己的成本函数来适应不同的规划需求。成本函数不局限于路径长度,还可以包括时间、能耗或者任何其他重要的规划指标。 -
实时性:
尽管RRT*的计算成本相对较高,但它仍可以应用于需要实时或近实时响应的场景,尤其是在算法被适当优化的情况下。 -
随机性:
算法的随机性质意味着它能够避免在复杂环境中陷入局部最小值,这是其他基于梯度的优化算法的常见问题。 -
容错性:
由于RRT*是通过不断迭代来逐步构建解决方案,即使在某些迭代中遇到了失败,算法仍然可以在后续的迭代中恢复并找到解决方案。 -
并行处理:
RRT*的结构允许在多线程或分布式系统中实现并行处理,进一步提高路径规划的效率。
代码示例
Python代码
以下是RRT*算法的简单实现,用于二维空间的路径规划。
import numpy as np
import matplotlib.pyplot as plt
class Node:
"""定义节点类,代表每一个搜索点。
Attributes:
point (np.array): 节点在空间中的坐标。
cost (float): 从起点到当前节点的总路径成本。
parent (Node): 当前节点的父节点,用于追溯路径。
"""
def __init__(self, point, cost=0, parent=None):
self.point = point # 节点坐标
self.cost = cost # 到达该节点的成本
self.parent = parent # 父节点
def distance(point1, point2):
"""计算两点之间的欧几里得距离。
"""
return np.linalg.norm(np.array(point1) - np.array(point2))
def nearest(nodes, q_rand):
"""在现有节点中找到离随机点q_rand最近的节点。
"""
return min(nodes, key=lambda node: distance(node.point, q_rand))
def steer(q_near, q_rand, step_size=1.0):
"""从q_near朝向q_rand方向生成一个新的节点,但距离不超过step_size。
"""
direction = np.array(q_rand) - np.array(q_near.point)
length = np.linalg.norm(direction)
direction = direction / length # 单位化方向向量
length = min(step_size, length) # 控制步长
return Node(q_near.point + direction * length) # 生成新节点
def is_collision_free(node, obstacles):
"""检查给定的节点是否与任何障碍物发生碰撞。
"""
for (ox, oy, radius) in obstacles:
if np.linalg.norm([node.point[0] - ox, node.point[1] - oy]) <= radius:
return False # 如果节点在障碍物内,返回False
return True # 节点无碰撞,返回True
def find_path(nodes, start, goal, goal_threshold=0.6):
"""寻找从起点到终点的路径。
"""
# 寻找离终点最近的节点作为结束点
goal_node = min([node for node in nodes if distance(node.point, goal) < goal_threshold], key=lambda n: n.cost, default=None)
path = []
if goal_node is None:
return path
while goal_node is not None:
path.append(tuple(goal_node.point)) # 将节点添加到路径
goal_node = goal_node.parent # 回溯父节点
return path[::-1] # 反转路径
def rrt_star(start, goal, obstacles, num_iterations=1000, search_radius=1.5):
"""执行RRT*算法以找到起点到终点的路径。
"""
nodes = [Node(start)] # 初始化节点列表,包含起点
for _ in range(num_iterations):
q_rand = np.random.uniform(-10, 10, 2) # 随机生成点
q_near = nearest(nodes, q_rand) # 找到最近的节点
q_new = steer(q_near, q_rand) # 生成新节点
if is_collision_free(q_new, obstacles): # 确保新节点无碰撞
neighbors = [node for node in nodes if distance(node.point, q_new.point) < search_radius and is_collision_free(node, obstacles)]
q_new.parent = min(neighbors, key=lambda node: node.cost + distance(node.point, q_new.point), default=q_near) if neighbors else q_near
q_new.cost = q_new.parent.cost + distance(q_new.parent.point, q_new.point)
nodes.append(q_new) # 添加新节点到节点列表
path = find_path(nodes, start, goal) # 寻找路径
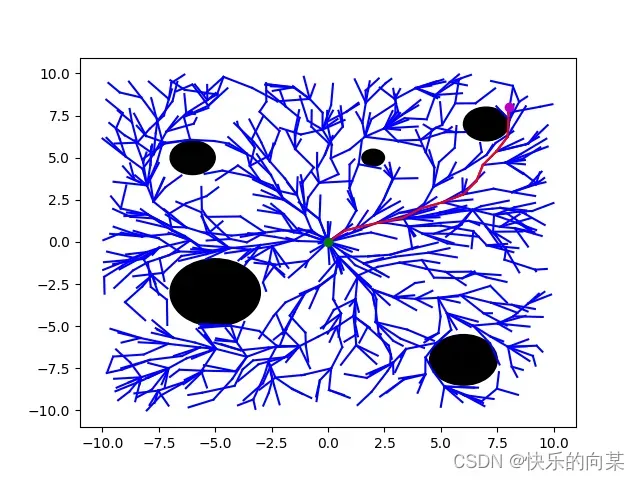
# 绘图展示
plt.figure()
for node in nodes:
if node.parent:
plt.plot([node.point[0], node.parent.point[0]], [node.point[1], node.parent.point[1]], 'b-') # 以蓝色绘制搜索树
for i in range(len(path) - 1): # 绘制路径
plt.plot([path[i][0], path[i+1][0]], [path[i][1], path[i+1][1]], 'r-') # 以红色绘制最优路径
plt.plot(start[0], start[1], 'go') # 以绿色标记起点
plt.plot(goal[0], goal[1], 'mo') # 以紫色标记终点
for (ox, oy, radius) in obstacles:
circle = plt.Circle((ox, oy), radius, color='k', fill=True)
plt.gca().add_patch(circle) # 绘制障碍物
plt.show()
# 示例用法
start = (0, 0)
goal = (8, 8)
# 圆形障碍物列表,每个障碍物由中心坐标和半径定义
obstacles = [(-5, -3, 2),(2, 5, 0.5),(-6, 5, 1), (6, -7, 1.5), (7, 7, 1)]
nodes = rrt_star(start, goal, obstacles) # 执行RRT*算法
在这个代码中,find_path 函数寻找从起点到终点的有效路径。rrt_star 函数则是整个RRT*算法的主体,它初始化搜索树,进行迭代搜索,并在完成后绘制搜索结果。
代码运行结果
应用案例
RRT*算法由于其高效的路径规划能力,尤其是在处理复杂空间和动态环境方面的优势,已经被广泛应用于许多领域。以下是一些具体的应用案例:
-
机器人导航:
在机器人领域,RRT* 被用来规划从起点到终点的最优路径,同时避免碰撞和不必要的移动。它特别适用于复杂的环境,如有障碍物或未知区域的室内外场景。无论是工业机器人在仓库中导航,还是服务机器人在医院和酒店内活动,RRT* 都能有效地指导它们安全地移动到目标位置。 -
自动驾驶汽车:
自动驾驶技术利用RRT*来规划车辆在复杂交通环境中的行驶路径。算法能够帮助汽车识别最佳行驶路线,同时应对动态变化的路况,如突然出现的障碍物或紧急避让场景。 -
无人机航迹规划:
RRT* 适用于三维空间的路径规划,使其成为无人机航迹规划中的重要工具。无人机可以利用RRT* 规避高楼大厦、山脉或其他空中障碍,同时在必要的情况下优化飞行路径以节约能量。 -
游戏和虚拟环境:
在游戏开发和虚拟现实(VR)应用中,RRT* 用于动态生成非玩家角色(NPC)或其他动态元素的移动路径。这些路径需要实时计算,同时看起来必须自然和随机,以增强游戏体验的真实感和可玩性。 -
运动规划和动画:
在电影和动画制作中,RRT*可以用来创建复杂的动作序列和真实的动画路径。它能够为动画角色或物体规划在三维空间中的移动,尤其是在包含多个动作目标和障碍物的场景中。 -
搜索与救援:
在紧急情况下,如地震或其他灾难后,RRT* 可以帮助搜索与救援机器人快速地在废墟中寻找生存者。这种情况下,环境复杂且时常变化,RRT*可以有效地指导机器人避开危险区域,同时找到可能的生存者所在位置。
这些应用案例展示了RRT*算法在不同场景下的适用性和灵活性,尤其是在路径规划必须快速响应环境变化时。它的优化能力确保了路径规划的效率和成本效益,使其在实际应用中变得尤为宝贵。
优化和挑战
RRT*算法,作为一种高效的随机路径规划算法,在很多应用领域都取得了成功。尽管如此,这个算法也面临着一些优化的需求和挑战。
优化方面
-
计算效率:
RRT* 算法在迭代过程中可能会生成大量节点,这可能导致计算资源的巨大消耗。为了提高效率,可以优化数据结构(例如使用KD树)以加快最近邻搜索过程。 -
步长调整:
在节点扩展时,合理选择步长(也称为扩展长度)对算法的性能有很大影响。动态调整步长,使其在空旷区域大步前进,在障碍密集区域小心翼翼,可以提升路径规划的效率。 -
启发式方法:
采用启发式方法来指导采样点的选择,比如靠近目标区域的点被采样的概率更高,可以帮助算法更快收敛至目标。 -
成本函数的设计:
成本函数对路径规划起决定性作用。在特定应用中设计更为合适的成本函数,不仅可以加速寻找最优解,还可以确保路径的实际可行性和安全性。
面临的挑战
-
局部最小值:
RRT* 可能会在复杂的环境中陷入局部最小值,即找到一个好但非最佳的路径,并在该区域过度优化而难以逃脱。 -
动态环境下的应用:
在动态变化的环境中,如自动驾驶车辆避障,RRT* 需要能够实时更新路径,这要求算法能够快速响应环境变化。 -
高维度问题:
在高维空间中,如机器人手臂的运动规划,RRT*的计算复杂性会急剧上升。此时算法的扩展性成为了一个挑战。 -
用户定义参数的敏感性:
RRT*的表现在很大程度上取决于用户定义的参数(如搜索半径、最大迭代次数等),对这些参数的选择需要经验和多次试验才能确定,这增加了使用算法的难度。
总结
RRT*算法是一种在连续空间内进行有效路径规划的强大工具。通过引入成本优化策略,它在原始RRT算法的基础上提供了渐近最优解的可能性,即随着时间的推移,路径的质量会不断提高,趋向于全局最优。这一特性使其在机器人导航、自动驾驶、航空规划以及其他需要在复杂环境中快速规划路径的领域中尤为重要。
然而,尽管RRT* 具备显著的优势,如无需梯度信息、适用于各种复杂环境、能够适应动态变化等,它仍面临着一些挑战。其中包括在高维空间中的计算成本、对初始参数选择的敏感性以及在高动态环境中保持实时响应能力的需求。当前和未来的研究聚焦于进一步优化RRT* 的效率,例如通过改进采样策略、数据结构和启发式搜索,或是结合其他算法以强化其性能。
综上所述,RRT* 算法已经成为了路径规划领域的一个基石,并将继续随着新技术和策略的出现而进化。通过不断的研究和发展,我们可以预期RRT* 及其变种将在处理更复杂的实际问题时发挥更大的作用。
版权声明:本文为博主作者:快乐的向某原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/qq_51929160/article/details/137649394