不小心提前放出来了,同样在第九期的同学们小心!
1、信息矩阵分析
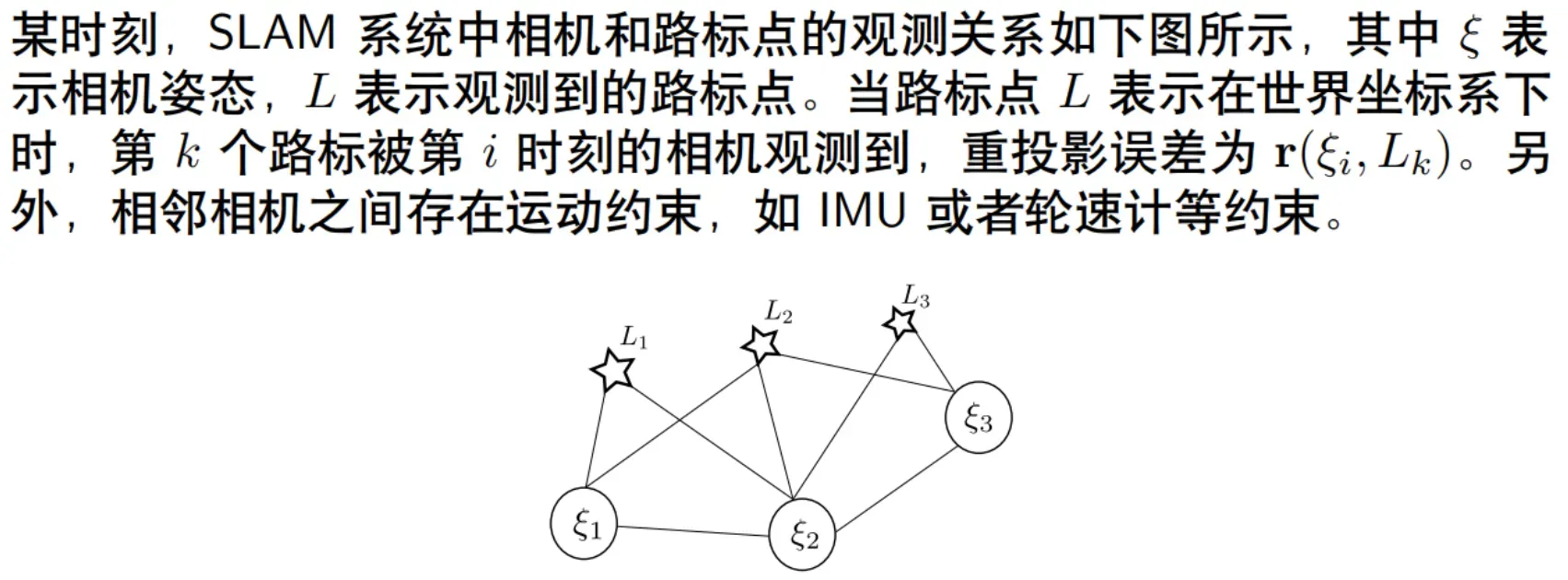
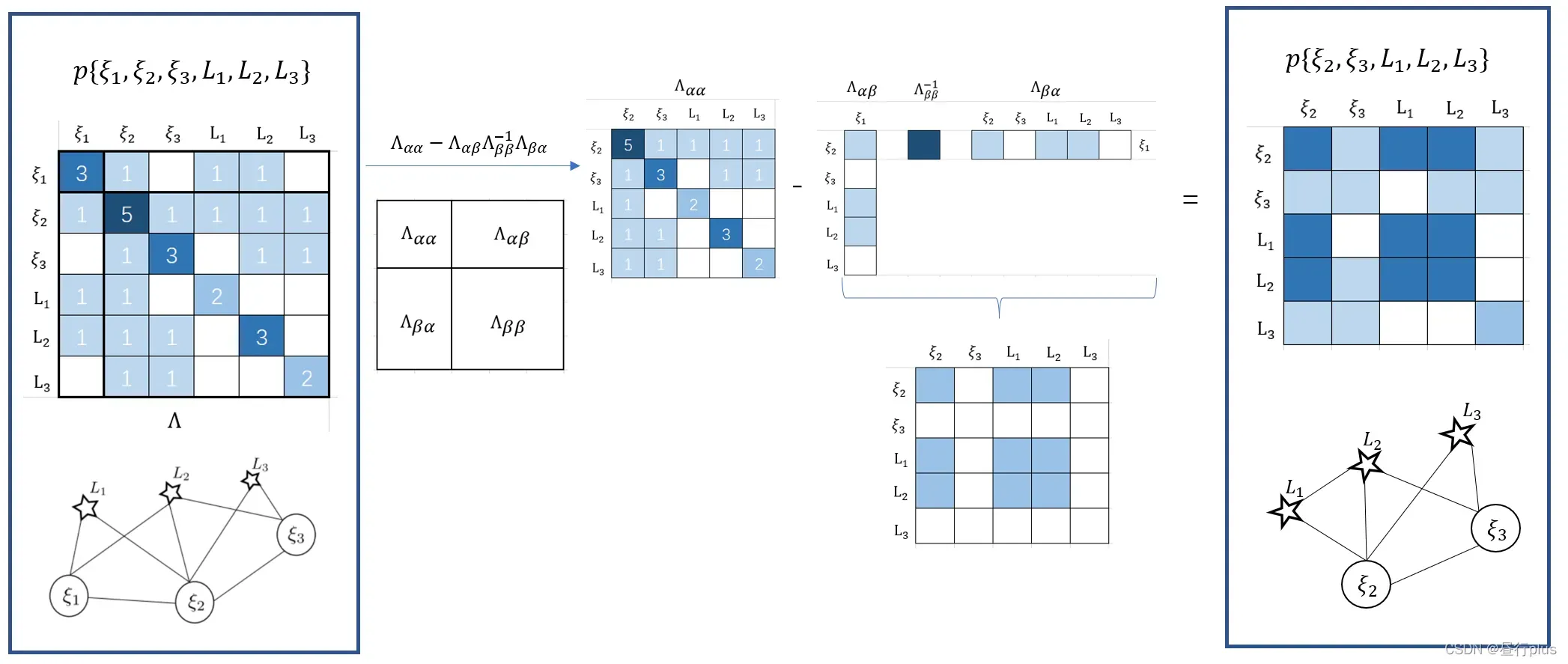
1.1 绘制上述系统的信息矩阵Λ
雅各比:
高斯-牛顿增量方程:
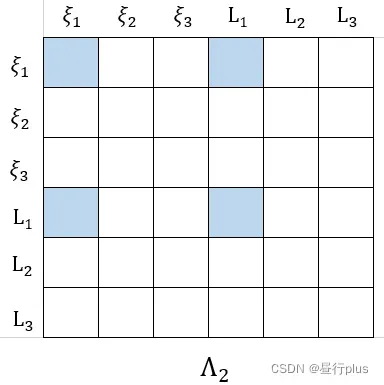
例如:
对应的信息矩阵为
从得到的信息矩阵
如下:
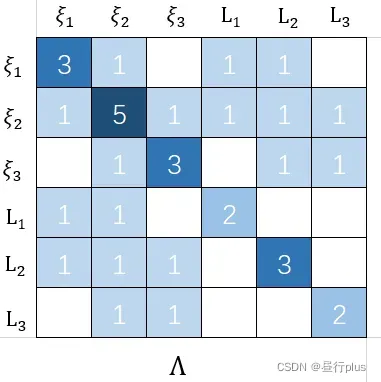
其实可以直接根据变量之间的关系给出。上面的公式只是一个理论说明。
1.2 绘制相机 被 marg 以后的信息矩阵Λ′
被 marg 以后的信息矩阵Λ′
参考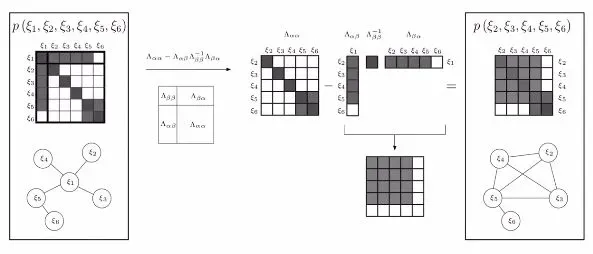
得到相机被 marg 以后的信息矩阵
:
2、证明信息矩阵和协方差的逆之间的关系
阅读《Relationship between the Hessian and Covariance Matrix for Gaussian Random Variables》 证明信息矩阵和协方差的逆之间的关系
证明一

对其取负对数得到负对数似然(Negative Log Likelihood)函数
将上式(A.2) 看作二次函数的二阶泰勒展开(关于海塞矩阵和泰勒展开),则

公式(A.4)的等号是建立在是
的线性函数的基础上的;
如果是非线性函数,泰勒展开式会有三阶以上的项,所以应该是近似等号。
总结如下:
当高斯分布的均值是关于状态的线性函数时,negative log likelihood的二阶导数(也就是其Hessian),正好是这个线性变换后的新状态的的协方差的逆,此时也有Hessian of Negative Log Likelihood (about the original state) = Inverse of (new) Covariance Matrix。
当高斯分布的均值是关于状态的非线性函数时,可以做一个线性化将其展开乘线性形式,于是 Approximate Hessian of Negative Log Likelihood (about the original state) = Approximate Inverse of (new) Covariance MatrixInverse of (new) Covariance Matrix。
原文来自:https://www.cnblogs.com/xiaochen-qiu/p/11170487.html
现在问题变成了证明信息矩阵与Hessian矩阵相等
这个外语博客证明了这一点(全英文警告!)
证据二
设 n 维高斯随机变量
其概率密度函数为:
即上式(A.1)的。
由于分母与
无关,令
得
根据wiki中信息矩阵的定义:
这里和
应该是一样的。为了计算方便,我们写:
和
所以
所以
即信息矩阵=协方差矩阵的逆
参考多维高斯随机变量的信息矩阵与协方差矩阵的关系
3、编程题
请补充作业代码中单目 Bundle Adjustment 信息矩阵的计算,并输出正确的结果。
正确的结果为:奇异值最后 7 维接近于 0,表明零空间的维度为 7
3.1 原理分析
补充内容是Hessian矩阵,在此之前需要得到雅可比矩阵。涉及雅可比行列式的代码有两种:
1、jacobian_Pj:重投影误差(观测方程)对特征点(表示在世界坐标系下)的雅克比矩阵
2、jacobian_Ti:表示重投影误差(观测方程)对相机位姿的雅克比矩阵。
涉及的具体代码如下: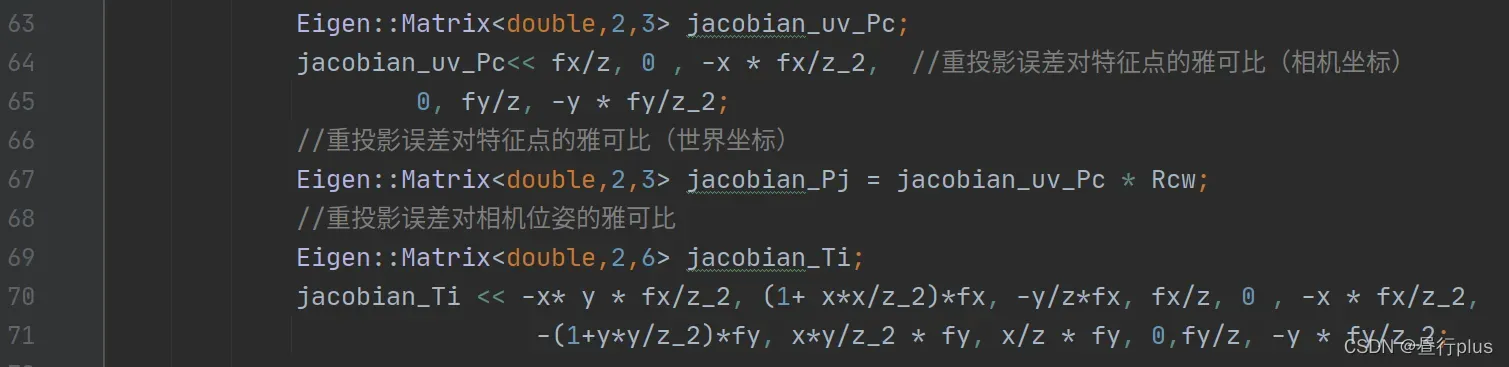
参考十四讲第二版p186-p197
在世界坐标系中标记地标点,其在相机坐标系中的坐标为
,即
容易得到重投影误差对
的雅可比, 也即代码中的jacobian_uv_Pc
对于jacobian_Pj,通过链式法则有: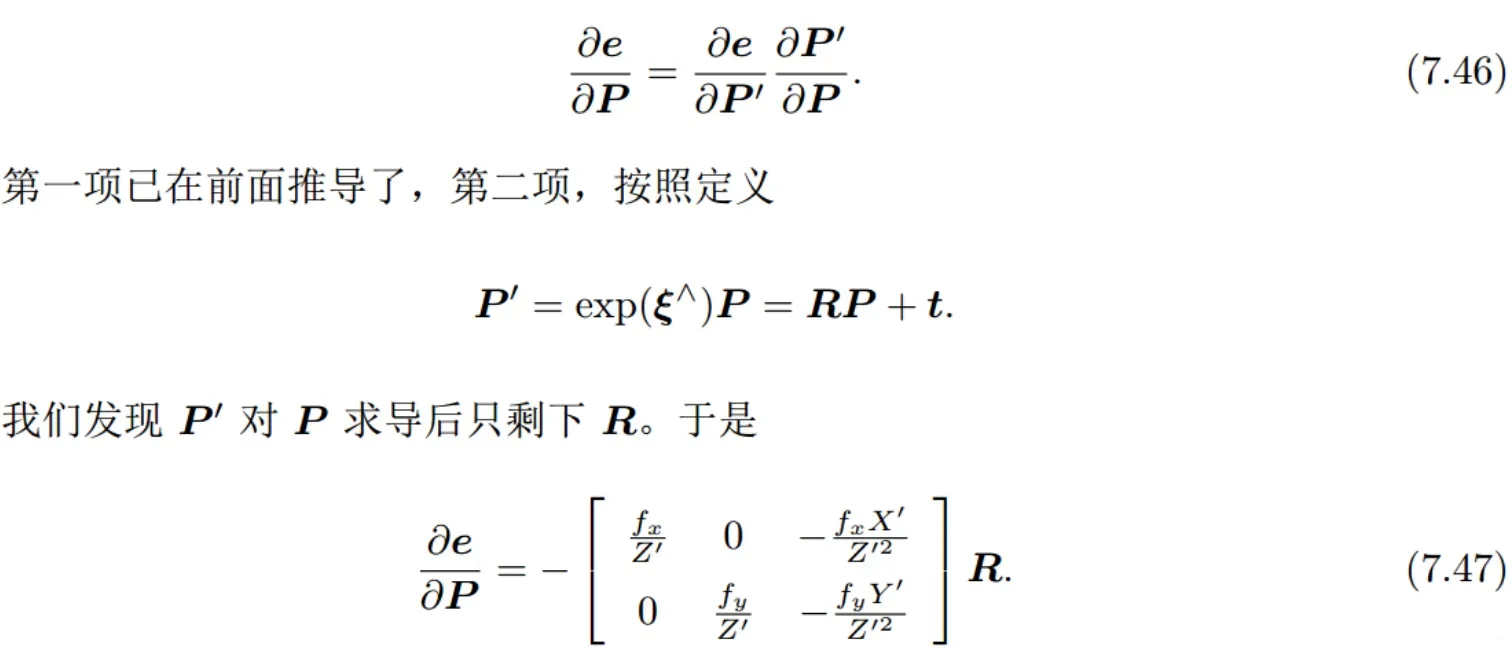
而重投影误差对相机位姿的雅可比jacobian_Ti为:
如果的定义是平移前后旋转,那么矩阵的前三列可以与后三列互换。
代码正是这样做的。
公式推导可见博客第4题,第2问。
Hessian矩阵的计算类似于第一题的信息矩阵分析。
3.2 代码内容
hessian_nullspace_test.cpp
//
// Created by daybeha on 22-03-05.
//
#include <iostream>
#include <vector>
#include <random>
#include <Eigen/Core>
#include <Eigen/Geometry>
#include <Eigen/Eigenvalues>
struct Pose
{
Pose(Eigen::Matrix3d R, Eigen::Vector3d t):Rwc(R),qwc(R),twc(t) {};
Eigen::Matrix3d Rwc;
Eigen::Quaterniond qwc;
Eigen::Vector3d twc;
};
int main()
{
int featureNums = 20;
int poseNums = 10;
int diem = poseNums * 6 + featureNums * 3;
double fx = 1.;
double fy = 1.;
Eigen::MatrixXd H(diem,diem);
H.setZero();
std::vector<Pose> camera_pose;
double radius = 8;
for(int n = 0; n < poseNums; ++n ) {
double theta = n * 2 * M_PI / ( poseNums * 4); // 1/4 圆弧
// 绕 z轴 旋转
Eigen::Matrix3d R;
R = Eigen::AngleAxisd(theta, Eigen::Vector3d::UnitZ());
Eigen::Vector3d t = Eigen::Vector3d(radius * cos(theta) - radius, radius * sin(theta), 1 * sin(2 * theta));
camera_pose.push_back(Pose(R,t));
}
// 随机数生成三维特征点
std::default_random_engine generator;
std::vector<Eigen::Vector3d> points;
for(int j = 0; j < featureNums; ++j)
{
//连续均匀分布
//http://c.biancheng.net/view/640.html
std::uniform_real_distribution<double> xy_rand(-4, 4.0);
std::uniform_real_distribution<double> z_rand(8., 10.);
double tx = xy_rand(generator);
double ty = xy_rand(generator);
double tz = z_rand(generator);
Eigen::Vector3d Pw(tx, ty, tz);
points.push_back(Pw);
for (int i = 0; i < poseNums; ++i) {
Eigen::Matrix3d Rcw = camera_pose[i].Rwc.transpose();
Eigen::Vector3d Pc = Rcw * (Pw - camera_pose[i].twc);
double x = Pc.x();
double y = Pc.y();
double z = Pc.z();
double z_2 = z * z;
Eigen::Matrix<double,2,3> jacobian_uv_Pc;
jacobian_uv_Pc<< fx/z, 0 , -x * fx/z_2, //重投影误差对特征点的雅可比(相机坐标)
0, fy/z, -y * fy/z_2;
//重投影误差对特征点的雅可比(世界坐标)
Eigen::Matrix<double,2,3> jacobian_Pj = jacobian_uv_Pc * Rcw;
//重投影误差对相机位姿的雅可比
Eigen::Matrix<double,2,6> jacobian_Ti;
jacobian_Ti << -x* y * fx/z_2, (1+ x*x/z_2)*fx, -y/z*fx, fx/z, 0 , -x * fx/z_2,
-(1+y*y/z_2)*fy, x*y/z_2 * fy, x/z * fy, 0,fy/z, -y * fy/z_2;
H.block(i*6,i*6,6,6) += jacobian_Ti.transpose() * jacobian_Ti;
/// 请补充完整作业信息矩阵块的计算
H.block(i*6, poseNums * 6 + j * 3, 6, 3) +=jacobian_Ti.transpose() * jacobian_Pj;
H.block(poseNums * 6 + j * 3, i*6, 3,6) += jacobian_Pj.transpose() * jacobian_Ti;
H.block(poseNums * 6 + j * 3, poseNums * 6 + j * 3, 3, 3) += jacobian_Pj.transpose() * jacobian_Pj;
}
}
// std::cout << H << std::endl;
// Eigen::SelfAdjointEigenSolver<Eigen::MatrixXd> saes(H);
// std::cout << saes.eigenvalues() <<std::endl;
Eigen::JacobiSVD<Eigen::MatrixXd> svd(H, Eigen::ComputeThinU | Eigen::ComputeThinV);
std::cout << svd.singularValues() <<std::endl;
return 0;
}
新增内容:
H.block(i*6, poseNums * 6 + j * 3, 6, 3) +=jacobian_Ti.transpose() * jacobian_Pj;
H.block(poseNums * 6 + j * 3, i*6, 3,6) += jacobian_Pj.transpose() * jacobian_Ti;
H.block(poseNums * 6 + j * 3, poseNums * 6 + j * 3, 3, 3) += jacobian_Pj.transpose() * jacobian_Pj;
代码输出: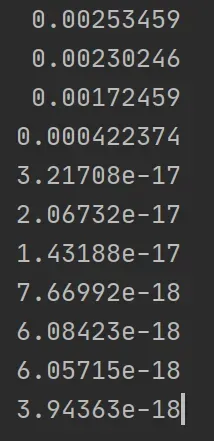
拓展笔记 – 奇异值分解(SVD, singular value decomposition)
如果你和我一样基础较弱,肯定对svd.singularValues()有疑问,它返回的是什么?
奇异值
什么是奇异值?没有任何意义?
找一个更生动的关于奇异值的链接,我会删掉一些我认为更重要的部分:
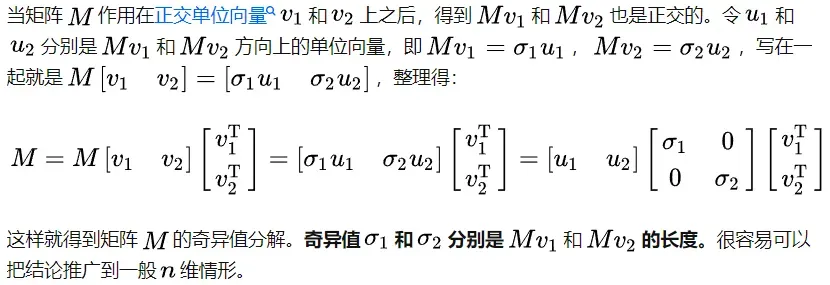
奇异值分解的几何意义是:对于任意一个矩阵,我们需要找到一组二乘二正交的单位向量序列,使得矩阵作用于这个向量序列后,得到一个新的向量序列,保持二乘二正交性。奇异值的几何意义是:经过这组变换后新向量序列的长度。
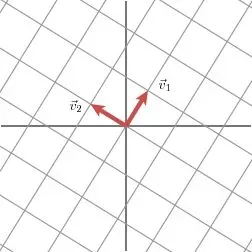
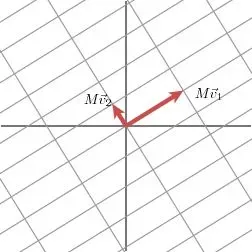
如上图,
向量和
分别是
的左右奇异向量
另外,奇异值具有大于零的性质,一般从大到小排列:另外两个关于奇异值分解的更详细的博客:
奇异值分解的秘密(一):矩阵的奇异值分解过程
奇异值分解的秘密(二):降维和奇异向量的意义
为什么说奇异值最后 7 维接近于 0就表明零空间的维度为 7?什么是零空间维度?
对于零空间,wiki中的定义为:一个算子
的零空间是方程
的所有解
那么这很清楚:
根据奇异值的公式:,当
为0时,公式变为
,
那么对应于的右奇异向量
又因为有7个奇异值为0,那么
参考
从零手写VIO——(四)基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补
从零手写VIO——(四)基于滑动窗口算法的 VIO 系统:可观性和一致性(下)滑动窗口算法
手写VIO总结(四)
手写VIO课后作业(四)
从零开始手写VIO第四章作业(含关键点的参考资料)
深蓝学院《从零开始手写VIO》作业4
深蓝学院《从零开始手写VIO》作业四
YouDao Cloud Note
高翔,张涛等《视觉SLAM十四讲》p186-p197
舒尔布
Schur complement
雅可比矩阵、黑森矩阵、泰勒展开
Fisher information
多维高斯随机变量信息矩阵与协方差矩阵的关系
【原创】极大似然估计中,信息矩阵、Hessian矩阵和协方差矩阵的关系
版权声明:本文为博主昼行plus原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/weixin_48592526/article/details/123218599