1. 原理
N图标定是使用海康自研标定板拍摄N张标定板图像,以标定板坐标系的原点在像素坐标系中的坐标,与机械手TCP点在BASE坐标系下的坐标进行计算映射关系。
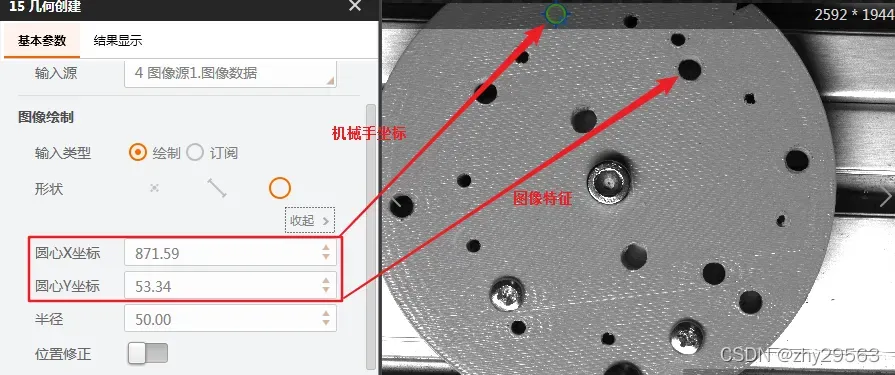
由于标定板坐标系原点与机械手TCP点不同心,因此在完成标定后,需要计算标定板坐标系原点与TCP点在机械手BASE坐标系下的相对偏移量。
实际计算时,需要通过N图标定计算得到标定文件,将图像坐标系下的点坐标映射到机械手BASE坐标系下,注意,此时获取的坐标并不是特征在BASE坐标系下的实际坐标,需要补上偏移量。
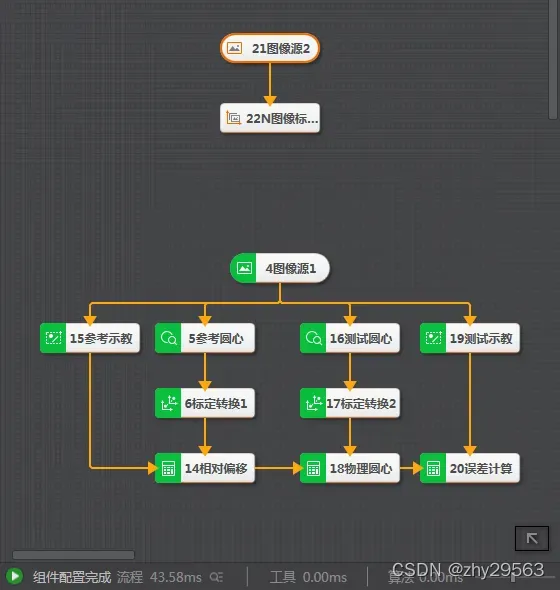
2. 方案配置
3 标定
可能的步骤:
- 像素坐标系中标定板坐标系原点的坐标提取
- 机械手TCP坐标在BASE坐标系下的坐标计算
- 由于标定板坐标系的原点与TCP点不同心,因此通过这两组点仅能计算图像坐标系与机械手BASE坐标系之间的间接关系
3.1 图像源
本例中使用了九个点,因此需要添加九个校准板图像。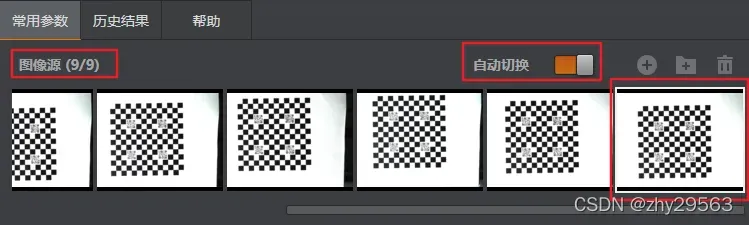
注意
- 图像源模块中图像队列中的九幅图像的顺序必须与机器人移动的顺序一致
- 选择最后一张图片,确保点击运行按钮是输入的第一张图片
- 开启自动切换
3.2 N图标定

- 偏移X
X方向坐标第一次发生变化时,前一个点的X坐标减去后一个点的X坐标 - 偏移Y
Y方向坐标第一次发生变化时,前一个点的Y坐标减去后一个点的Y坐标 - 移动优先
第一个点与第二个点,X方向坐标发生变化就是X优先,Y方向坐标发生变化就是Y优先
配置完成后,点击Process Run按钮,连续点击九次,完成每幅图像的坐标采集。
注意
如果中途出现异常或者标定报错,需要重新执行图像源的设置,且在N图标定模块中点击清空图像按钮完成初始化
4. 偏移量计算
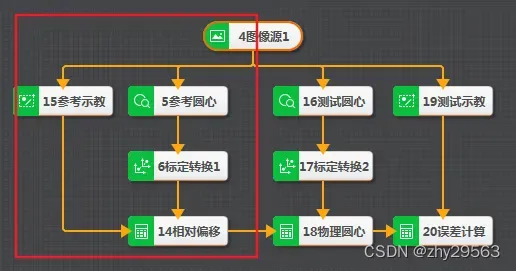
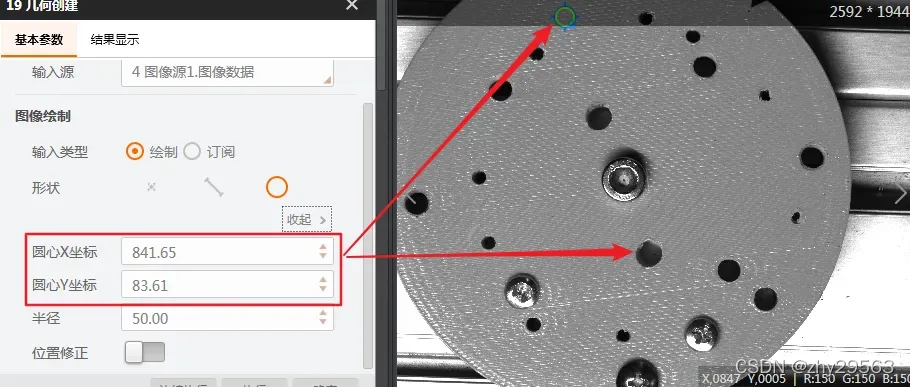
4.1 参考示教
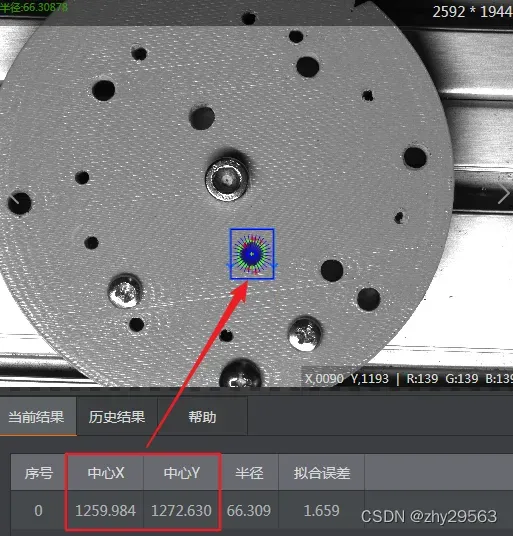
4.2 圆查找
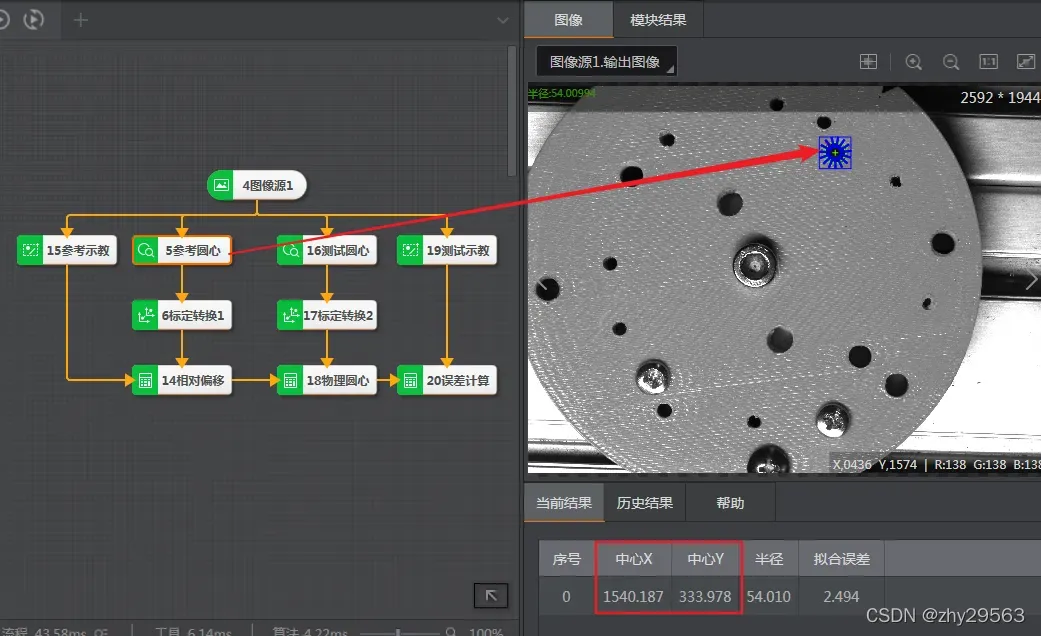
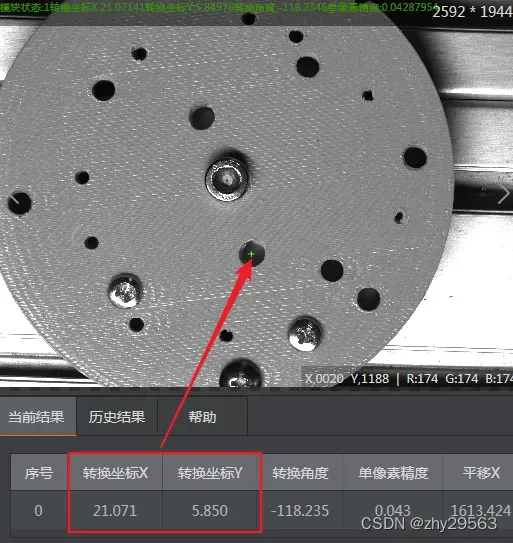
4.3 标定转换

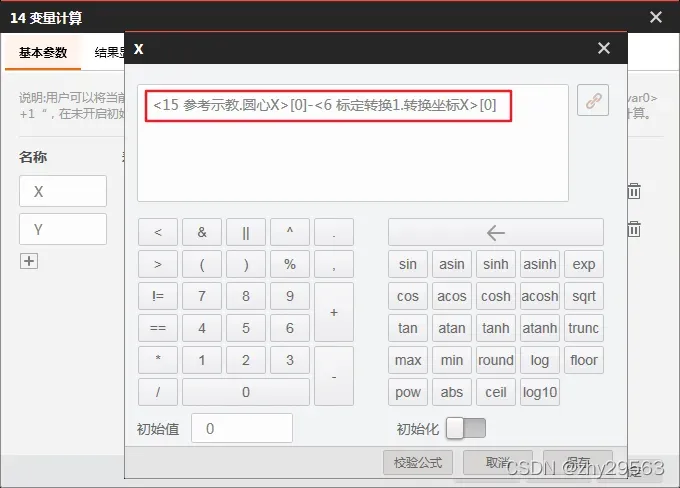
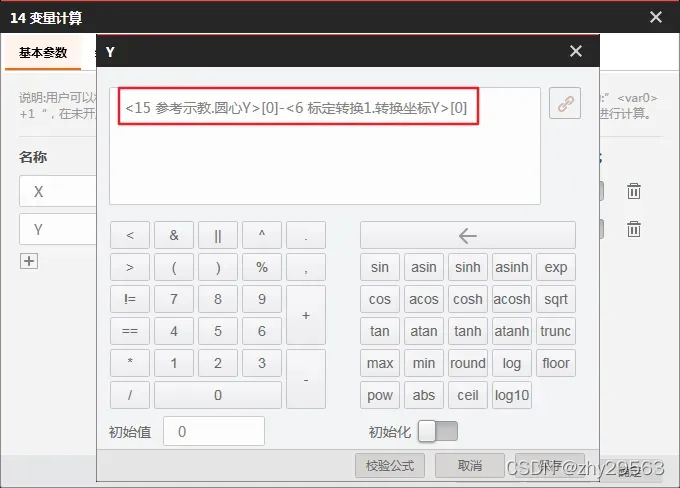
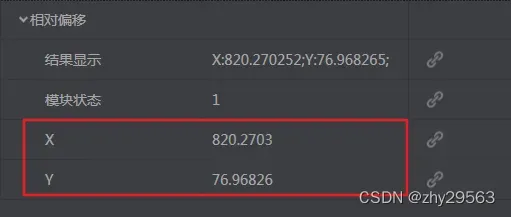
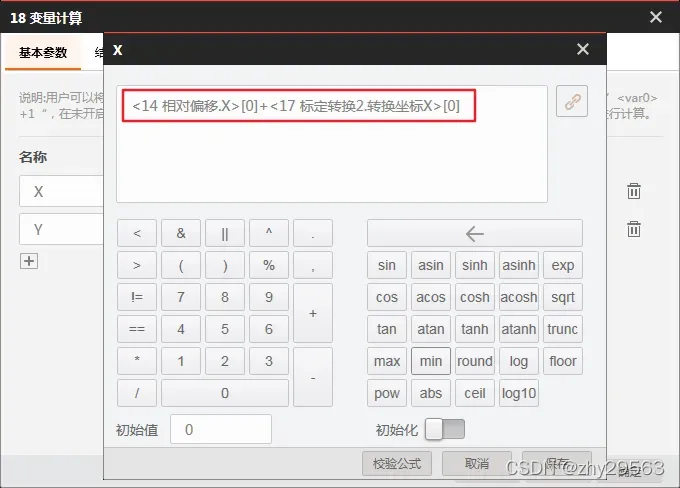
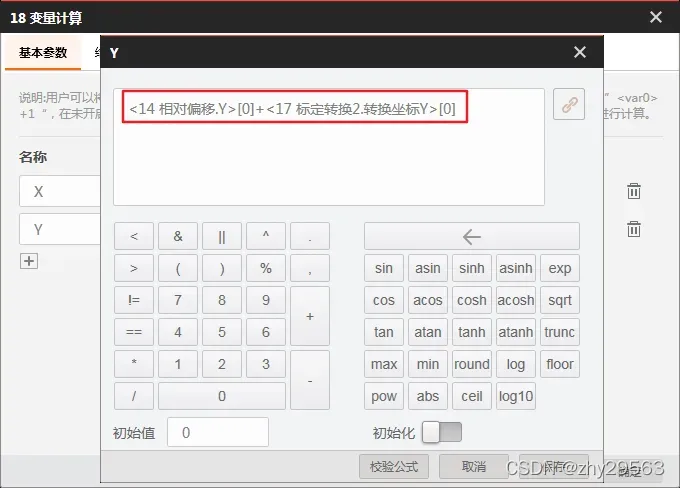
4.4 相对偏移
5. 测试
5.1 测试示教
5.2 圆查找
5.3 标定转换
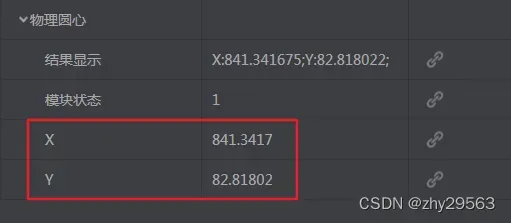
5.4 物理圆心
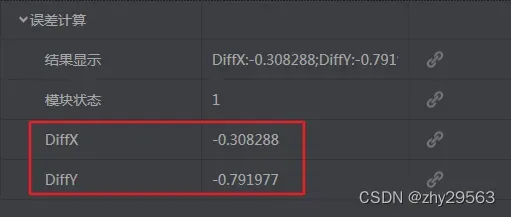
6. 误差
文章出处登录后可见!
已经登录?立即刷新