ROS wiki系列文章简介:ROS wiki系列文章是本人ROS专栏下的子专题。该系列文章主要用来介绍:ROS初学者如何利用好ROS官方提供的ROS wiki平台,来查询ROS资料,了解ROS包的功能,检索ROS遇到的问题等。ROS学习相关的博文会在此专栏下持续更新,专栏链接如下:ROS学习专栏
备注:本系列文章,以2022年5月ROS wiki版本为例。
一、前言
ROS提供分布式松耦合的通信架构,而通信的基本数据类型称为消息类型。在ROS wiki中如何查看有哪些消息类型?如何查看消息类型的定义?如何明确消息类型应用的领域?这均是在ROS开发过程中,亟需要解决的问题。
之前,我在本专栏中已总结了ROS的消息类型的相关教程。可参考:【ROS进阶】5000字解析如何确定ROS编程中数据类型(消息类型)。本文将从ROS wiki网站的使用角度,去介绍如何查找常用的ROS消息类型。

二、消息类型查阅方式
(一)功能包路径
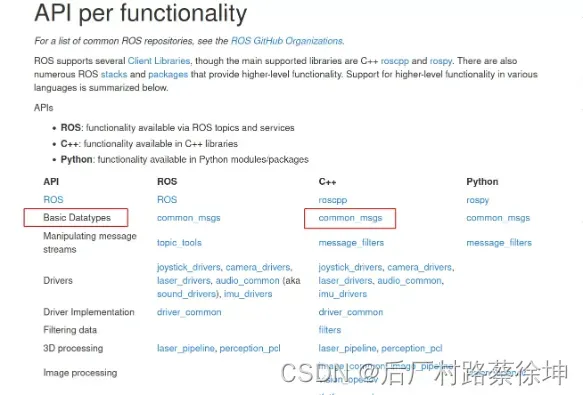
在ROS wiki的首页,可以通过此路径查阅ROS中常见的消息类型:Documentation-Core Libraries-common_msgs。common_msgs功能包中,包含了ROS中常见的数据类型。
(二)ROS中消息类型的结构框架
1、common_msgs
ROS中C++和Python最基础的数据类型包为common_msgs。其中包含常见的多种消息类型:动作消息( actionlib_msgs ),诊断消息 ( diagnostic_msgs ), 几何消息( geometry_msgs ),导航消息( nav_msgs )和常见的传感器消息 ( sensor_msgs )。
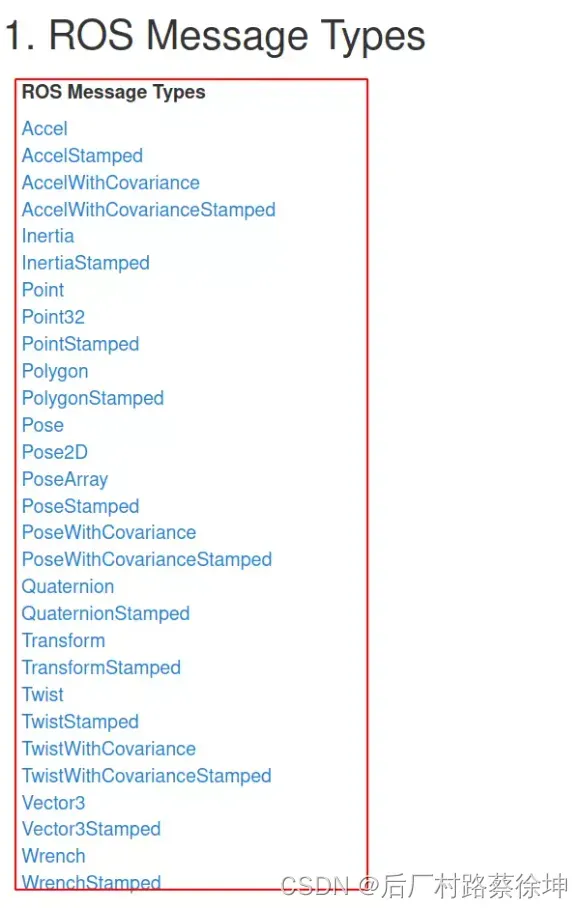
2、geometry_msgs
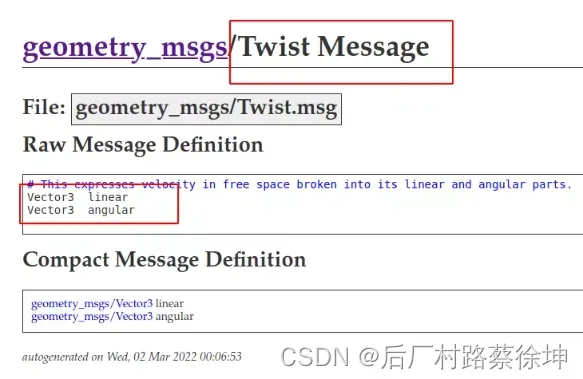
3、Twist类型定义
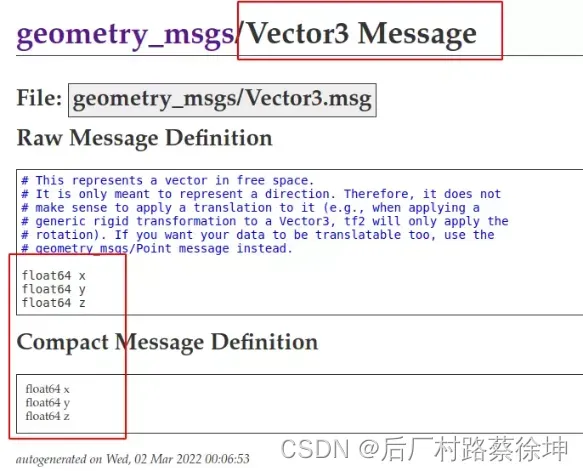
4、vetor3的定义
5、对象赋值

文章出处登录后可见!
已经登录?立即刷新