一、主流雷达简介
1.微波雷达
- 简介:微波是波长很短的无线电波,微波的方向性很好,速度等于光速。微波遇到车辆立即被反射回来,再被雷达测速计接收。这样一来一回,不过几十万分之一秒的时间,数码管上就会显示出所测车辆的车速。
- 应用:汽车雷达防撞系统 公路测速系统
- 优势:微波的方向性很好
2.红外雷达
- 简介:红外雷达是指工作在红外波段的光雷达。由红外辐射源、光学会聚系统、红外探测部件、电子部件、控制机构和显示部分等组成。
- 应用:生命迹象探测
3.毫米波雷达
- 简介:毫米波雷达,是工作在毫米波波段(millimeter wave )探测的雷达。通常毫米波是指30~300GHz频域(波长为1~10mm)的。毫米波的波长介于微波和厘米波之间,因此毫米波雷达兼有微波雷达和光电雷达的一些优点。
- 应用:导弹制导、目标监视和截获、炮火控制和跟踪、雷达测量
- 优势:与红外、激光、电视等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的特点。另外,毫米波导引头的抗干扰、反隐身能力也优于其他微波导引头 。毫米波雷达能分辨识别很小的目标,而且能同时识别多个目标;具有成像能力,体积小、机动性和隐蔽性好,在战场上生存能力强
- 劣势:雨、雾和湿雪等高潮湿环境的衰减,树丛穿透能力差,相比微波,对密树丛穿透力低
4.激光雷达
- 简介:激光雷达(英文:Laser Radar),是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。它由激光发射机、光学接收机、转台和信息处理系统等组成,激光器将电脉冲变成光脉冲发射出去,光接收机再把从目标反射回来的光脉冲还原成电脉冲,送到显示器。
- 应用:机载海洋激光雷达、自动驾驶激光雷达
- 优势:分辨率高、隐蔽性好、抗有源干扰能力强、低空探测性能好、体积小、质量轻
- 劣势:工作时受天气和大气影响大。激光一般在晴朗的天气里衰减较小,传播距离较远。而在大雨、浓烟、浓雾等坏天气里,衰减急剧加大,传播距离大受影响。由于激光雷达的波束极窄,在空间搜索目标非常困难,直接影响对非合作目标的截获概率和探测效率,只能在较小的范围内搜索、捕获目标,因而激光雷达较少单独直接应用于战场进行目标探测和搜索。
二、多传感器融合技术
1.为什么要融合?
- 军事场景中作战环境复杂,场景高速动态变化。
- 单一传感器难以应对全天候、全天气、全场景的驾驶环境。
- 需要应对单一传感器失效带来的致命危险。
2.融合面临的问题
- 时空同步问题
- 各模态数据增强后的特征如何对齐
- 各模态中间特征如何对齐
- 如何实现有效融合,实现1+1>1
- 如何在边缘设备上部署并实时运行
三、3D点云技术
1.点云可视化软件:CloudCompare

2.点云数据特点
-
无序性:一堆点的集合,排列顺序无影响
-
近密远疏的特性
-
非结构化数据,很难直接CNN
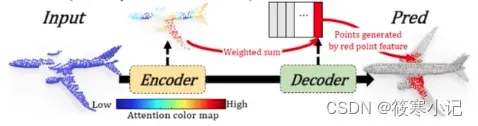
-
要解决的任务就是如何对点云数据进行特征提取
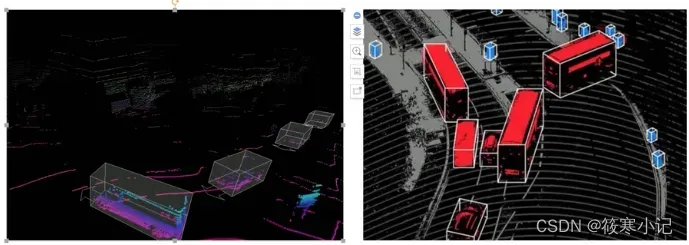
3.应用场景
应用场景主要为分类、分割、补全和目标检测
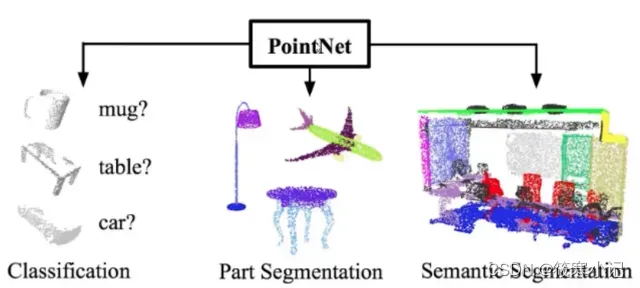

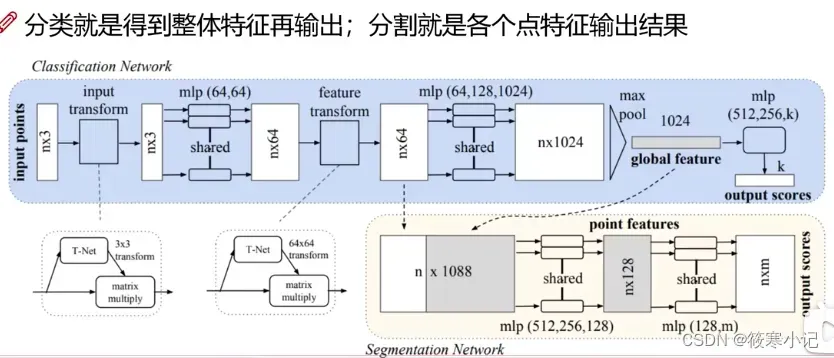
4.流行算法
PointNet、PointNet++
文章出处登录后可见!
已经登录?立即刷新