分别来用keras实现通道注意力模块和空间注意力模块。
#通道注意力机制
def channel_attention(input_feature, ratio=8):
channel_axis = 1 if K.image_data_format() == "channels_first" else -1
channel = input_feature._keras_shape[channel_axis]
shared_layer_one = Dense(channel//ratio,
activation='relu',
kernel_initializer='he_normal',
use_bias=True,
bias_initializer='zeros')
shared_layer_two = Dense(channel,
kernel_initializer='he_normal',
use_bias=True,
bias_initializer='zeros')
avg_pool = GlobalAveragePooling2D()(input_feature)
avg_pool = Reshape((1,1,channel))(avg_pool) # Reshape: width,height,depth
#assert avg_pool._keras_shape[1:] == (1,1,channel)
avg_pool = shared_layer_one(avg_pool)
#assert avg_pool._keras_shape[1:] == (1,1,channel//ratio)
avg_pool = shared_layer_two(avg_pool)
#assert avg_pool._keras_shape[1:] == (1,1,channel)
max_pool = GlobalMaxPooling2D()(input_feature)
max_pool = Reshape((1,1,channel))(max_pool)
#assert max_pool._keras_shape[1:] == (1,1,channel)
max_pool = shared_layer_one(max_pool)
#assert max_pool._keras_shape[1:] == (1,1,channel//ratio)
max_pool = shared_layer_two(max_pool)
#assert max_pool._keras_shape[1:] == (1,1,channel)
cbam_feature = Add()([avg_pool,max_pool]) # 处理后的结果相加
cbam_feature = Activation('sigmoid')(cbam_feature) # 获得各通道的权重图
if K.image_data_format() == "channels_first":
cbam_feature = Permute((3, 1, 2))(cbam_feature)
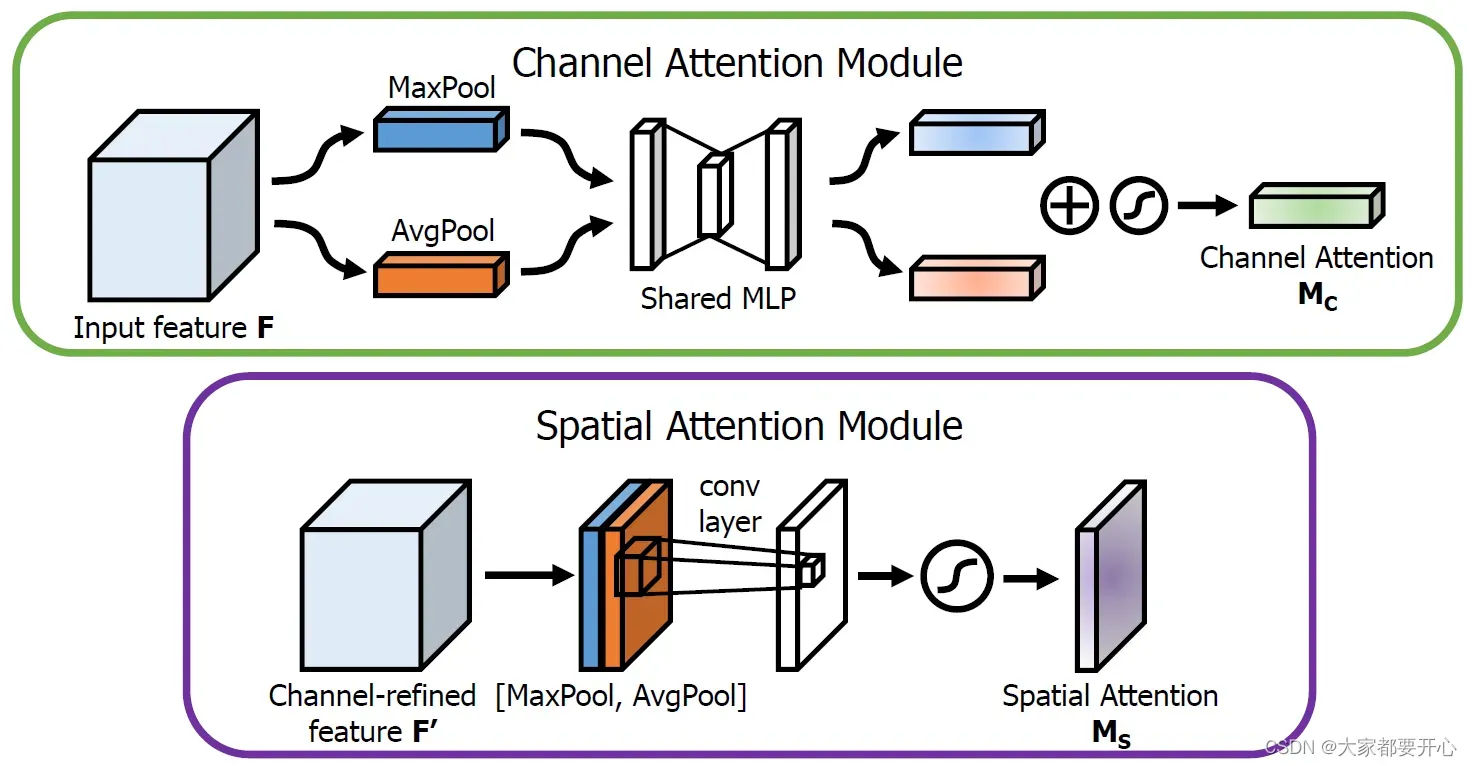
return multiply([input_feature, cbam_feature])通道注意力:将输入的featuremap,分别经过基于width和height的global max pooling 和global average pooling。
目的:保持通道数不变
"""
我们先分别进行一个通道维度的平均池化和最大池化得到两个 H×W×1 的通道描述,并将这两个描述按照通道拼接在一起;
然后,经过一个 7×7 的卷积层,激活函数为 Sigmoid,得到权重系数 Ms;
最后,拿权重系数和特征 F’ 相乘即可得到缩放后的新特征。
"""
def spatial_attention(input_feature):
kernel_size = 7
if K.image_data_format() == "channels_first":
channel = input_feature._keras_shape[1]
cbam_feature = Permute((2,3,1))(input_feature)
else:
channel = input_feature._keras_shape[-1]
cbam_feature = input_feature
avg_pool = Lambda(lambda x: K.mean(x, axis=3, keepdims=True))(cbam_feature) # 对张量求平均值,改变第三维坐标,并保持原本维度
#assert avg_pool._keras_shape[-1] == 1
max_pool = Lambda(lambda x: K.max(x, axis=3, keepdims=True))(cbam_feature)
#assert max_pool._keras_shape[-1] == 1
concat = Concatenate(axis=3)([avg_pool, max_pool]) # 拼接
#assert concat._keras_shape[-1] == 2
cbam_feature = Conv2D(filters = 1,
kernel_size=kernel_size,
strides=1,
padding='same',
activation='sigmoid',
kernel_initializer='he_normal',
use_bias=False)(concat)
#assert cbam_feature._keras_shape[-1] == 1
if K.image_data_format() == "channels_first":
cbam_feature = Permute((3, 1, 2))(cbam_feature)
return multiply([input_feature, cbam_feature])空间注意力:将输入的featuremap,做一个基于channel的global max pooling 和global average pooling。
目的:保持特征图大小不变
CBAM
将Channel attention模块输出的特征图作为Spatial attention模块的输入特征图
def cbam_block(cbam_feature, ratio=8):
cbam_feature = channel_attention(cbam_feature, ratio)
cbam_feature = spatial_attention(cbam_feature)
return cbam_feature到底如何做到“随插随用”
首先用keras框架构建一个Resnet_v1
# resnet layer
def resnet_layer(inputs,
num_filters=16,
kernel_size=3,
strides=1,
activation='relu',
batch_normalization=True,
conv_first=True):#True is v1 False is v2
conv = Conv2D(num_filters,
kernel_size=kernel_size,
strides=strides,
padding='same',
kernel_initializer='he_normal',
kernel_regularizer=l2(1e-4))
x = inputs
if conv_first:
x = conv(x)
if batch_normalization:
x = BatchNormalization()(x)
if activation is not None:
x = Activation(activation)(x)
else:
if batch_normalization:
x = BatchNormalization()(x)
if activation is not None:
x = Activation(activation)(x)
x = conv(x)
return x
#def resnet_v1(input_shape, depth, num_classes=10): 原始代码
def resnet_v1(input_shape, depth, num_classes=10, attention_module=None): #改进1
if (depth - 2) % 6 != 0:
raise ValueError('depth should be 6n+2 (eg 20, 32, 44 in [a])')
# Start model definition.
num_filters = 16
num_res_blocks = int((depth - 2) / 6)#3
inputs = Input(shape=input_shape)
x = resnet_layer(inputs=inputs)
# Instantiate the stack of residual units
for stack in range(3):
for res_block in range(num_res_blocks):
strides = 1
if stack > 0 and res_block == 0: # first layer but not first stack
strides = 2 # downsample
y = resnet_layer(inputs=x,
num_filters=num_filters,
strides=strides)
y = resnet_layer(inputs=y,
num_filters=num_filters,
activation=None)
if stack > 0 and res_block == 0: # first layer but not first stack
# linear projection residual shortcut connection to match
# changed dims
x = resnet_layer(inputs=x,
num_filters=num_filters,
kernel_size=1,
strides=strides,
activation=None,
batch_normalization=False)
if attention_module is not None: #改进2
y = cbam_block(y) #改进3
x = keras.layers.add([x, y])
x = Activation('relu')(x)
#x = keras.layers.add([x, y])# 原始代码
#x = Activation('relu')(x)
num_filters *= 2
# Add classifier on top.
# v1 does not use BN after last shortcut connection-ReLU
x = AveragePooling2D(pool_size=8)(x)
y = Flatten()(x)#压平
outputs = Dense(num_classes,
activation='softmax',
kernel_initializer='he_normal')(y)
# Instantiate model.
model = Model(inputs=inputs, outputs=outputs)
return model
文章出处登录后可见!
已经登录?立即刷新