.1 文本方式读取
代码如下
stl_path='/home/pxing/codes/point_improve/data/003_cracker_box/0.stl'
points=[]
f = open(stl_path)
lines = f.readlines()
prefix='vertex'
num=3
for line in lines:
#print (line)
if line.startswith(prefix):
values = line.strip().split()
#print(values[1:4])
if num%3==0:
points.append(values[1:4])
num=0
num+=1
#print(type(line))
print(points)
f.close()该代码可以直接将stl文件中对点直接都输出
改进版本
import numpy as np
stl_path='/home/pxing/codes/point_improve/data/003_cracker_box/0.stl'
points=[]
f = open(stl_path)
lines = f.readlines()
prefix='vertex'
num=3
for line in lines:
#print (line)
if line.startswith(prefix):
values = line.strip().split()
#print(values[1:4])
if num%3==0:
points.append(values[1:4])
num=0
num+=1
#print(type(line))
points=np.array(points)
f.close()
print(points.shape)
np.save("/home/pxing/codes/point_improve/feature_get/point_get/test.npy", points)把输出的点转换为npy并且保存
1.1 stl解析
.stl文件格式如下图所示:
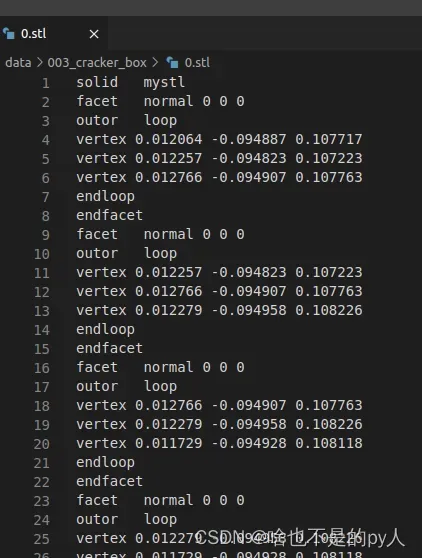
那么读取该文件就需要知道stl的构成
stl是一种表示三角网格的文件格式
STL只能用来表示封闭的面或者体,stl文件有两种:一种是ASCII明码格式,另一种是二进制格式
ASCII明码格式:
STL文件的首行给出了文件路径及文件名
STL三维模型就是由一系列这样的三角面片构成
三角面片的信息单元 facet 是一个带矢量方向的三角面片
每一个facet由7 行数据组成:
facet normal 是三角面片指向实体外部的法矢量坐标
outer loop 代表随后的3行数据分别是三角面片的3个顶点坐标
3顶点沿指向实体外部的法矢量方向逆时针排列
solid [filename] //文件名,可以是任何字符
facet normal [i j k] //面的法线,i、j、k为三个分量,各分量之间用空格隔开,不能用逗号隔开
outor loop
vertex [x y z] //三角面片的第一个点,x、y、z三个坐标之间要用空格隔开
vertex [x y z] //三角面片的第二个点
vertex [x y z] //三角面片的第三个点
endloop
endfacet //完成一个三角面片的定义
、、、、 //其他facet
endsolid [filename] //完成一个stl文件的定义
示例:
在电脑上新建一个txt文件,然后编辑。编辑完了之后保存,并将文件后缀名改为stl,即可完成一个创建了一个stl文件。如下图,利用文本编辑器将一个四面体的几何数据保存到文件中
效果如下图所示:
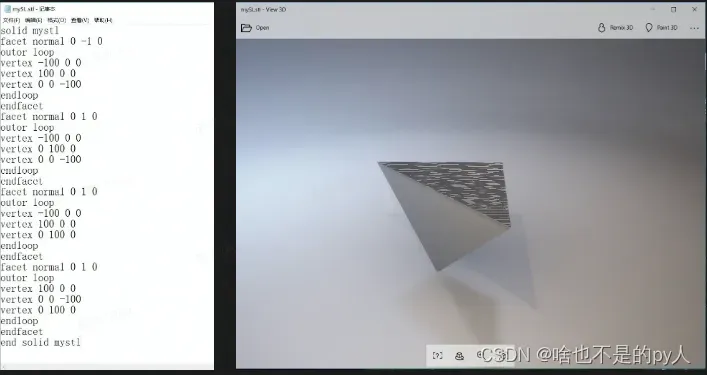
1.2 stl创建
创建一个三角形面片
solid mystl
facet normal 0 -1 0
outor loop
vertex -100 0 0
vertex 100 0 0
vertex 0 0 -100
endloop
endfacet
end solid mystl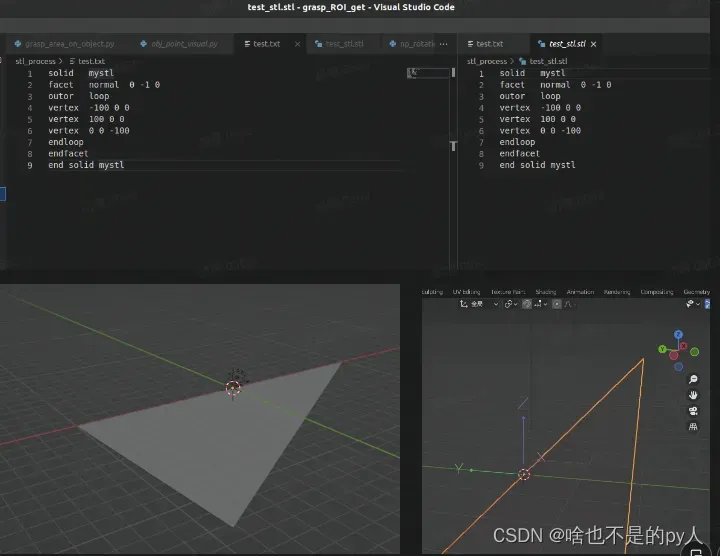
1.3 stl分割
完成了stl分割
stl_path='/home/harry/projects/spoon_to_scoop/object_process/spilt/decomp.stl'
with open(stl_path, "r") as f:
lines = f.readlines()
target_end = "endsolid"
i=0
for line in lines:
with open('/home/harry/projects/spoon_to_scoop/object_process/spilt/'+'bow_'+str(i)+".stl", "a") as new_f:
new_f.write(line)
if target_end in line:
i+=1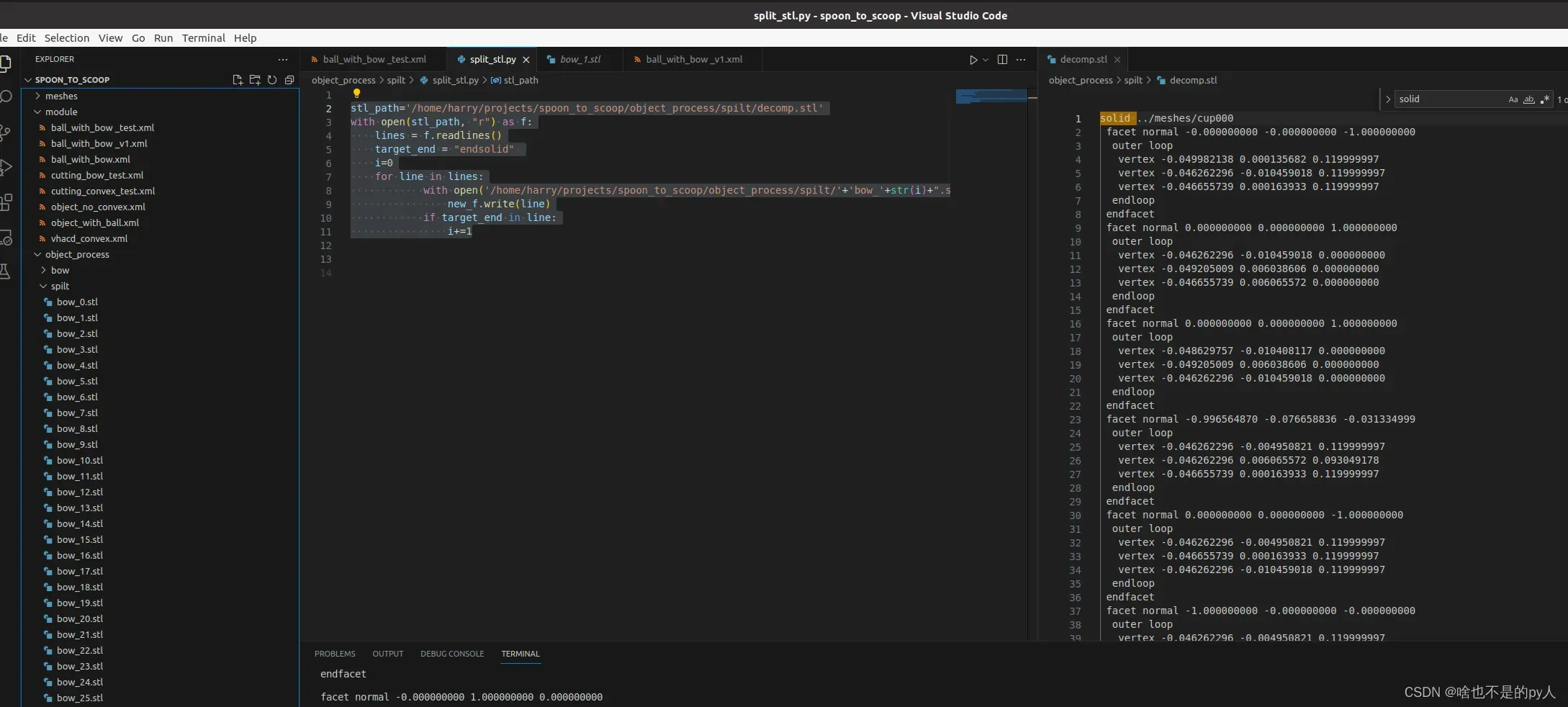
1.4 obj读取
def read_obj_vertices(file_path):
vertices = []
with open(file_path, 'r') as file:
for line in file:
if line.startswith('v '):
vertex = line.strip().split(' ')[1:]
vertex = [float(coord) for coord in vertex]
vertices.append(vertex)
return vertices
if __name__=='__main__':
obj_file_path = './object/nontextured.obj'
vertices = read_obj_vertices(obj_file_path)
list=[]
for vertex in vertices:
list.append(vertex)
print(list[0]).2 把点转换为.stl
import numpy as np
import sys
sys.path.append('/home/pxing/codes/grasp_ROI_get/')
from gripper_area import area_get
arr=np.array(area_get.main())
#print(arr[0,0:3])
with open('stl_process/data/test1.stl','a') as file0:
print('solid mystl ',file=file0)
print('facet normal' ,0,0,0,file=file0)
print('outor loop',file=file0)
print('vertex',arr[0,0],arr[0,1],arr[0,2 ],file=file0)
print('vertex',arr[1,0],arr[1,1],arr[1,2 ],file=file0)
print('vertex',arr[2,0],arr[2,1],arr[2,2 ],file=file0)
print('endloop\nendfacet',file=file0)
print('end solid mystl',file=file0).3 stl组装
import os
import numpy as np
def stl_get(stl_path):
points=[]
f = open(stl_path)
lines = f.readlines()
prefix='vertex'
num=3
for line in lines:
#print (line)
if line.startswith(prefix):
values = line.strip().split()
#print(values[1:4])
if num%3==0:
points.append([values[1],values[2],values[3]])
num=0
num+=1
#print(type(line))
points=np.array(points,dtype='float64')
#points=points*1000#3d打印用
f.close()
#print(points.shape)
#np.save("/home/pxing/codes/point_improve/feature_get/point_get/index_mm_level.npy", t)
return points
def stl_generate(arr,stl_path):
with open(stl_path,'a') as file0:
print('solid mystl ',file=file0)
for i in range((arr.shape[0]-3)):
print('facet normal' ,0,0,0,file=file0)
print('outor loop',file=file0)
print('vertex',arr[i,0],arr[i,1],arr[i,2 ],file=file0)
print('vertex',arr[i+1,0],arr[i+1,1],arr[i+1,2 ],file=file0)
print('vertex',arr[i+2,0],arr[i+2,1],arr[i+2,2 ],file=file0)
print('endloop\nendfacet',file=file0)
print('end solid mystl',file=file0)
print('generate success')
def mkdir(path):
folder = os.path.exists(path)
if not folder:#判断是否存在文件夹如果不存在则创建为文件夹
os.makedirs(path) #makedirs 创建文件时如果路径不存在会创建这个路径
file_path='/home/pxing/codes/point_improve/data/process_projection/'#stl储存的位置
goods_list=os.listdir(file_path)
for i in goods_list:
#对所有0子文件夹进行组装
index=0
file_stl_path=file_path+i+'/'+str(index)
stl_list=os.listdir(file_stl_path)
if stl_list:
arr_assembly=np.array([[0,0,0]])#创建一个空数组来组成后面的元素
for j in stl_list:
print(stl_list)
stl_path=file_stl_path+'/'+j
arr=stl_get(stl_path)
arr_assembly=np.concatenate((arr_assembly,arr),axis=0)
arr_assembly=np.delete(arr_assembly,[0,0],axis=0)
file_save_path='/home/pxing/codes/point_improve/data/auto_assembly_data/'+i+'/'+str(index)
mkdir(file_save_path)
stl_save_path=file_save_path+'/'+str(index)+'.stl'
stl_generate(arr_assembly,stl_save_path)
else:
pass.4 stl转obj(带f法向量的obj)
import numpy as np
def stl_get(stl_path):
points=[]
f = open(stl_path)
lines = f.readlines()
prefix='vertex'
num=3
for line in lines:
#print (line)
if line.startswith(prefix):
values = line.strip().split()
#print(values[1:4])
if num%3==0:
points.append([values[1],values[2],values[3]])
num=0
num+=1
#print(type(line))
points=np.array(points,dtype='float64')
#points=points*1000#3d打印用
f.close()
#print(points.shape)
#np.save("/home/pxing/codes/point_improve/feature_get/point_get/index_mm_level.npy", t)
return points
# 点云数据
stl_path='/home/pxing/codes/point_improve/data/rotation_data/assembly_projection_isaac.stl'
points = stl_get(stl_path)
# 计算点云的法向量
def compute_normals(points):
normals = []
for i, p0 in enumerate(points):
v1 = points[(i+1) % len(points)] - p0
v2 = points[(i+2) % len(points)] - p0
normals.append(np.cross(v1, v2))
return normals
normals = compute_normals(points)
# 将点云和法向量保存为OBJ格式文件
with open('/home/pxing/codes/point_improve/data/obj/point_f_assembly.obj', 'w') as f:
for i, p in enumerate(points):
f.write(f'v {p[0]} {p[1]} {p[2]}\n')
n = normals[i]
f.write(f'vn {n[0]} {n[1]} {n[2]}\n')生成带面的obj
import numpy as np
def stl_get(stl_path):
points=[]
f = open(stl_path)
lines = f.readlines()
prefix='vertex'
num=3
for line in lines:
#print (line)
if line.startswith(prefix):
values = line.strip().split()
#print(values[1:4])
if num%3==0:
points.append([values[1],values[2],values[3]])
num=0
num+=1
#print(type(line))
points=np.array(points,dtype='float64')
#points=points*1000#3d打印用
f.close()
#print(points.shape)
#np.save("/home/pxing/codes/point_improve/feature_get/point_get/index_mm_level.npy", t)
return points
# 点云数据
stl_path='/home/pxing/codes/point_improve/data/rotation_data/assembly_projection_isaac.stl'
points = stl_get(stl_path)
# 计算点云的法向量
def compute_normals(points):
normals = []
for i, p0 in enumerate(points):
v1 = points[(i+1) % len(points)] - p0
v2 = points[(i+2) % len(points)] - p0
normals.append(np.cross(v1, v2))
return normals
normals = compute_normals(points)
# 将点云和法向量保存为OBJ格式文件
with open('/home/pxing/codes/point_improve/data/obj/point_f_assembly.obj', 'w') as f:
for i, p in enumerate(points):
f.write(f'v {p[0]} {p[1]} {p[2]}\n')
n = normals[i]
f.write(f'vn {n[0]} {n[1]} {n[2]}\n')
# 将点云转换为面信息
for i in range(0, len(points), 3):
f.write(f'f {i+1}//{i+1} {i+2}//{i+2} {i+3}//{i+3}\n').5 ply生成
import numpy as np
def stl_get(stl_path):
points=[]
f = open(stl_path)
lines = f.readlines()
prefix='vertex'
num=3
for line in lines:
#print (line)
if line.startswith(prefix):
values = line.strip().split()
#print(values[1:4])
if num%3==0:
points.append([values[1],values[2],values[3]])
num=0
num+=1
#print(type(line))
points=np.array(points,dtype='float64')
#points=points*1000#3d打印用
f.close()
#print(points.shape)
#np.save("/home/pxing/codes/point_improve/feature_get/point_get/index_mm_level.npy", t)
return points
# 点云数据
stl_path='/home/pxing/codes/point_improve/data/rotation_data/assembly_projection_isaac.stl'
points = stl_get(stl_path)
# 将点云保存为含有顶点和面信息的PLY格式文件
with open('/home/pxing/codes/point_improve/data/obj/point_cloud.ply', 'w') as f:
# 写入PLY文件头
f.write('ply\n')
f.write('format ascii 1.0\n')
f.write(f'element vertex {len(points)}\n')
f.write('property float x\n')
f.write('property float y\n')
f.write('property float z\n')
f.write(f'element face {len(points)}\n')
f.write('property list uchar int vertex_indices\n')
f.write('end_header\n')
# 写入点云数据
for p in points:
f.write(f'{p[0]} {p[1]} {p[2]}\n')
# 写入面数据
for i in range(len(points)):
f.write(f'3 {i} {i} {i}\n')文章出处登录后可见!
已经登录?立即刷新