相关源码和数据文件已经更新在github:https://github.com/Wuito/Estimation-of-residual-life-of-particle-filter-lithium-ion-battery
粒子滤波采样
粒子滤波算法的完整建立在Gordon,Salmond和Smith提出的重采样技术上,并且一种新的采样算法(采样-重要性重采样)的发现和不断改良也对粒子滤波算法进行了丰富。
粒子滤波重采样
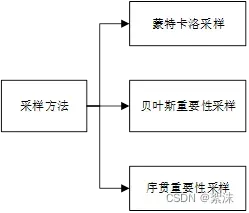
常用的重采样方法可以分为四类:最临近值重采样法,双线性重采样法,双立方重采样法,插值重采样法。
1)最邻近值重采样法:指的是比较目标图像与原图像的宽或者高,并且以此将原图像相对位置的像素点作为目标图像像素点的值。
2)双线性重采样法:指的是参考原图像对应像素周围四个点的值,并且由相对位置为每个点取权值来获得目标图像。
3)双立方重采样法:参考原像素点周围4*4个像素的值,并且根据这来获得目标图像。
4)插值重采样法:相比上述算法,这种方法参考更多原图像数据信息,可被用于求解对称矩阵方程组的求解以及特征值问题,重采样效果一般更好。
重采样算法是按概率进行复制和淘汰步骤,权重高的可能会被多次复制,这就保证了整体粒子数基本不变,然后进行归一化,将所有的粒子的权重都变为 1/n,继续进行下一步的预测更新步骤。虽然重采样的应用不会彻底根除粒子退化问题,但也会大大改善了粒子退化问题。
虽然重采样方法能够一定程度上减弱粒子退化问题,但是也必然会导致例子多样性的丧失,即N=1/(∑▒W_K^i ),N越小粒子退化问题也就越严重,就更加需要重采样,这样多次的重采样当然也会减慢粒子滤波的速度。
电池容量衰减模型
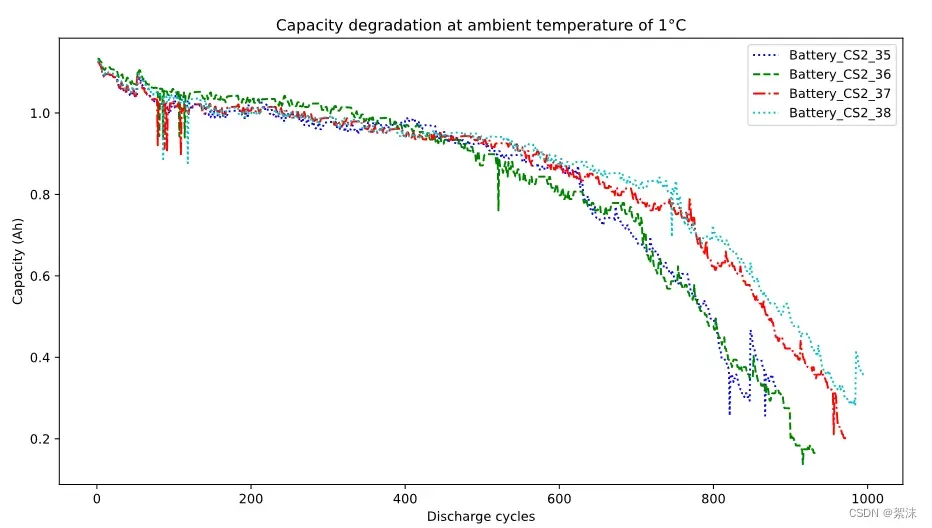
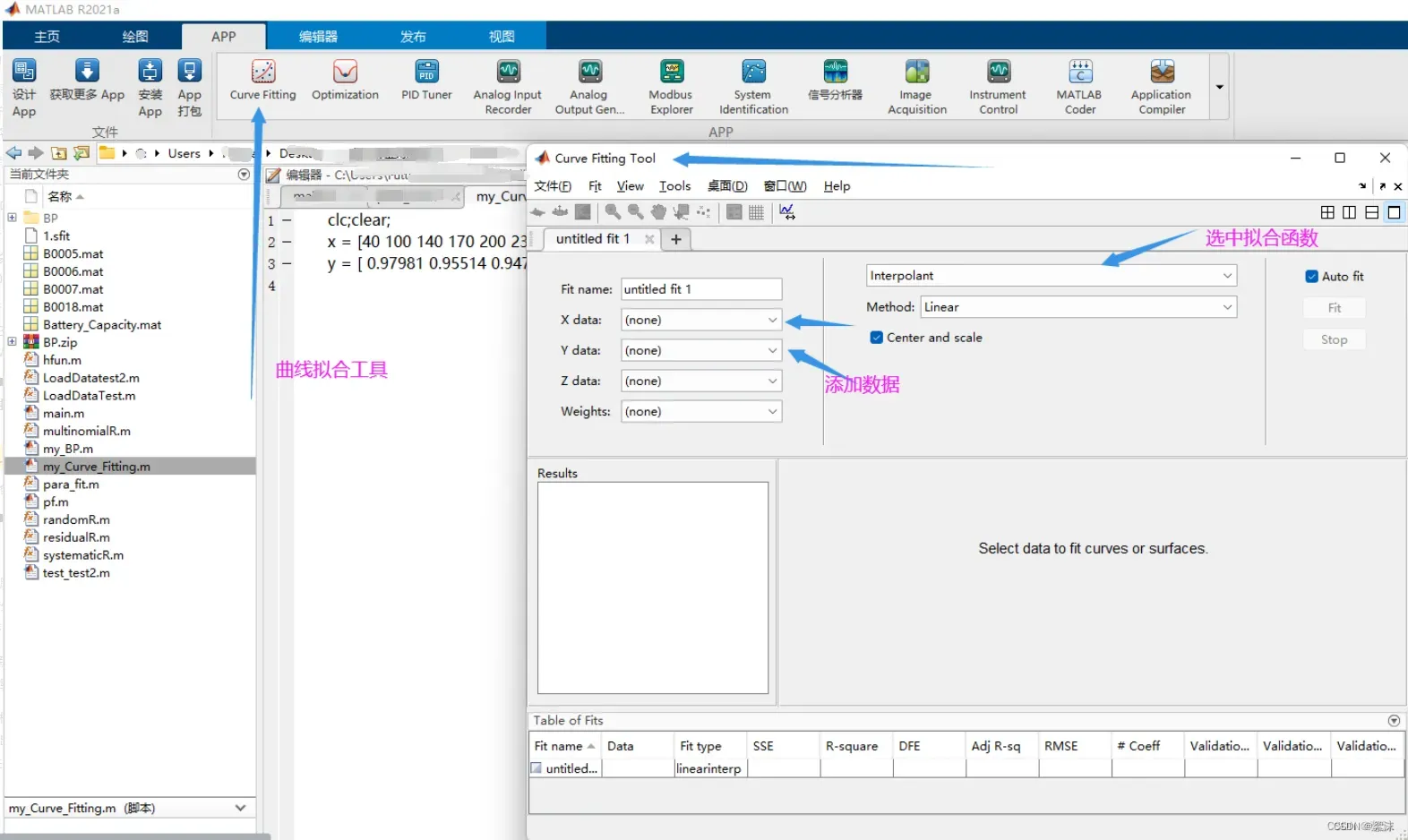
根据电池容量计算公式:Q=∫_tc^td▒〖I(t)dt〗,其中tc表示的是充电时间,td表示的是电池放电时间,I(t)表示的是电流,Q为锂离子电池的实时容量,而经过时间t则是记录了电池从循环开始到实验结束的时间。经过Matlab曲线拟合工具箱对四种电池容量数据进行指数拟合,能够得到比较准确的指数衰退模型。
根据电池衰减模型,我们选用双指数经验模型。
![]()
Q表示的是k时刻的电池容量,其中,k为循环次数,a,b,c,d均与锂离子电池本身有关,所以当a,b,c,d估算越准确,那么对于电池本身的模拟也就越真实,也就越能准确预测电池寿命。
算法流程
总结粒子滤波算法方法,有流程图:
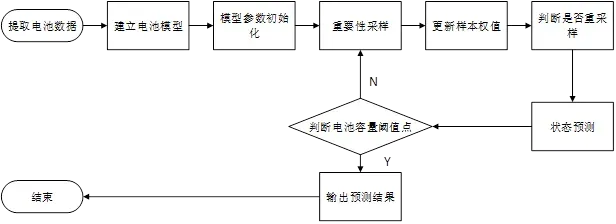
使用Python3.8、Numpy1.23、matplotlib3.6软件环境对上述算法进行设计。运行Python程序可以得到CS2电池的容量预测图,在实验中以CS2_36为样本集,对样本的前600个数据进行10:1随机抽样后使用Matlab拟合工具箱对双指数模型进行拟合。
曲线拟合
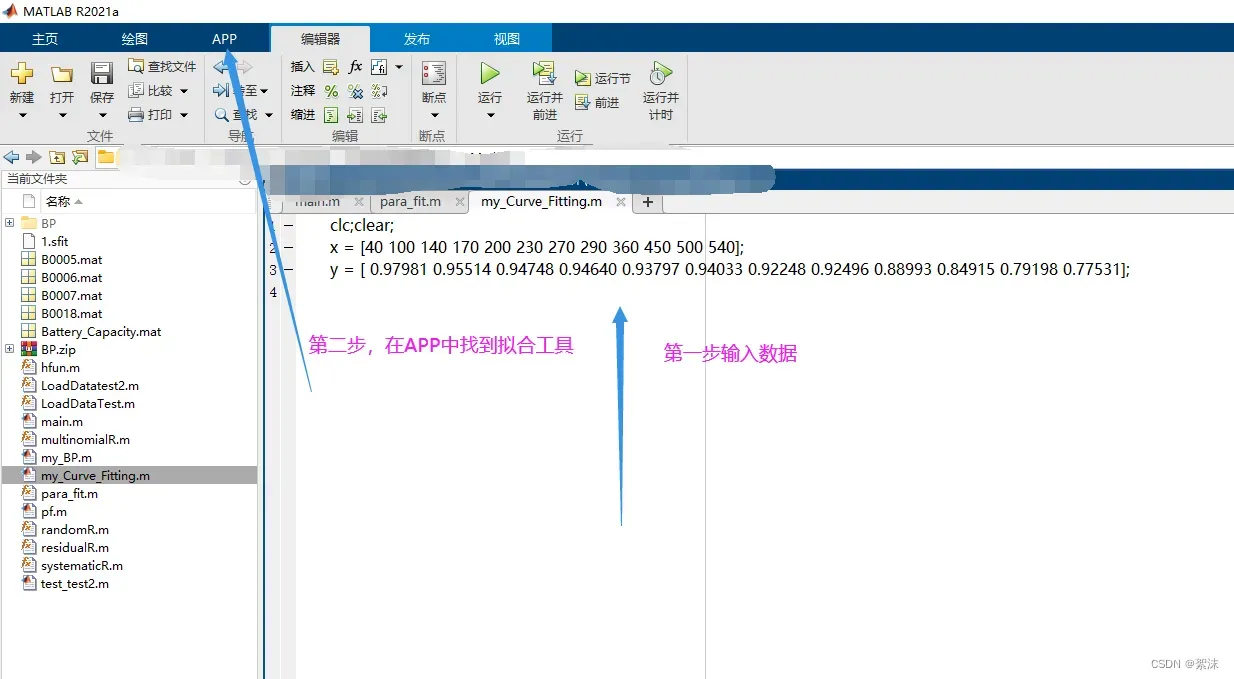
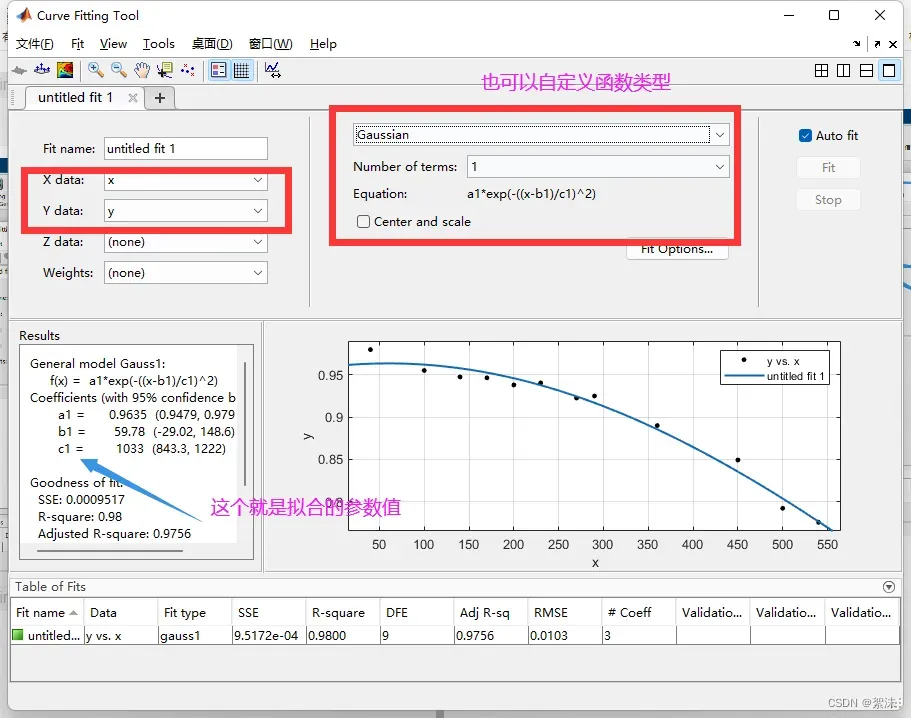
有了拟合的参数和算法方程,那就开始滤波了:
注意这里python加载的数据先前就已经计算好保存下来的数据
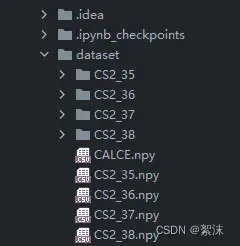
这是我工程的文件结构。你需要在上一篇博客里下载好马里兰大学的数据,处理好数据后保存为npy格式的文件,然后在这里应用。
先上粒子滤波的效果图:
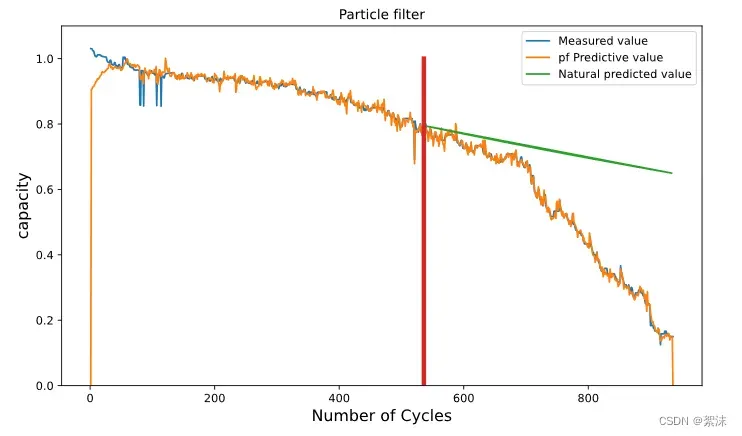
蓝色是观测值,黄色是滤波计算值,从红色线开始,绿色是没有滤波的自然观测计算值。
# 基于粒子滤波的锂离子电池RUL预测
# From: SWUST IPC14 Dai
import numpy as np
import matplotlib.pyplot as plt
from scipy.linalg import sqrtm
# Python3.8、Numpy1.23、matplotlib3.6
# 除去数据异常的较大值和较小值点
def drop_outlier(array, count, bins):
index = []
range_ = np.arange(1, count, bins)
for i in range_[:-1]:
array_lim = array[i:i + bins]
sigma = np.std(array_lim)
mean = np.mean(array_lim)
th_max, th_min = mean + sigma * 2, mean - sigma * 2
idx = np.where((array_lim < th_max) & (array_lim > th_min))
idx = idx[0] + i
index.extend(list(idx))
return np.array(index)
# 剩余容量双指数方程,状态方程
def hfun(X, k):
Q = X[0] * np.exp(X[1] * k) + X[2] * np.exp(X[3] * k)
return Q
# 重采样步骤:
# 预测:抽取新粒子
# 更新:更新粒子权值
# 状态估计
# 多项式重采样
# 重采样
def randomR(inIndex, q):
outIndex = np.zeros(np.shape(inIndex))
num = np.shape(q)
u = np.random.rand(num[0], 1)
u = np.sort(u, axis = 0)
u = np.array(u)
l = np.cumsum(q, axis=0)
i = 0
for j in np.arange(0, num[0]):
while (i <= (num[0]-1)) and (u[i] <= l[j]):
outIndex[i] = j
i = i + 1
return outIndex
# capacity:阶段放电容量
# resistance:放电阶段电池的的内阻平均值
# CCCT:恒定电流充电时间
# CVCT: 恒定电压充电时间
if __name__ == "__main__":
# ========================================
# 加载数据
# ========================================
Battery_name = 'CS2_38'
Battery = np.load('dataset/' + Battery_name + '.npy', allow_pickle=True)
Battery = Battery.item()
battery = Battery[Battery_name]
names = ['capacity', 'resistance', 'CCCT', 'CVCT']
# battery[1] = battery[1] /(battery[1] + 1.1)
# 粒子滤波步骤
# 初始化
# 更新粒子状态
# 权值计算和归一化
# 重采样
# 判断程序是否结束,迭代
# ========================================
# 预估数据为电池容量
# ========================================
N = len(battery['cycle'])
pf_Number = 200 # 粒子数
Prediction_Interval = 300 # 未来趋势值,预测区间的大小
cita = 1e-4
wa = 0.000001 # 设定状态初始值
wb = 0.01
wc = 0.1
wd = 0.0001
Q = cita * np.diag([wa, wb, wc, wd]) # Q为过程噪声方差矩阵,diag()创建指定对角矩阵
F = np.eye(4) # F为驱动计算矩阵,eye()单位对角矩阵
R = 0.001 # 观测噪声的协方差
# ========= 状态方程赋初值 ==============
a = -0.0000083499
b = 0.055237
c = 0.90097
d = -0.00088543
X0 = np.mat([a, b, c, d]).T # 矩阵转置
# ========= 滤波器状态初始化 ==============
Xpf = np.zeros([4, N])
Xpf[:, 0:1] = X0 # 对齐数组
# ========= 粒子集初始化 ==============
Xm = np.zeros([4, pf_Number, N])
for i in np.arange(0, pf_Number - 1):
sqr1 = np.array(sqrtm(Q))
sqr2 = sqr1.dot(np.random.randn(4, 1)) # 矩阵乘法,直接用*是矩阵点乘
Xm[:, i:i + 1, 0] = X0 + sqr2 # 对齐数组,需要将矩阵对齐后才能相加
# ========= 从数据集读取观测量 =============
capacity = battery[names[0]]
Z = np.array(capacity)
# ========= Zm为滤波器预测观测值,Zm与Xm对应 =============
Zm = np.zeros([1, pf_Number, N])
# ========= Zpf与Xpf对应 =============
Zpf = np.zeros([1, N]) # 计算中得到的Zpf为滤波器更新得到的容量值
# ========= 权值初始化 =============
Weight = np.zeros([N, pf_Number]) # 计算中得到的W为更新的粒子权重
# 粒子滤波算法
for k in np.arange(1, N - 1):
# 重要性采样
for i in np.arange(0, pf_Number - 1):
sqr1 = np.array(sqrtm(Q)) # 观测噪声
sqr2 = sqr1.dot(np.random.randn(4, 1)) # 矩阵乘法,直接用*是矩阵点乘
Xm[:, i:i + 1, k] = F.dot(Xm[:, i:i + 1, k - 1]) + sqr2
# 权值重要性计算
for i in np.arange(0, pf_Number - 1):
Zm[0, i:i + 1, k] = hfun(Xm[:, i:i + 1, k], k) # 观测预测
Weight[k, i] = np.exp(-(Z[k] - Zm[0, i:i + 1, k:k + 1]) ** 2 / 2 / R) + 1e-99 # 重要性权值计算,乘方用 **
Weight[k, :] = Weight[k, :] / sum(Weight[k, :]) # 权值归一化
# 重采样
# 这里的重采样以权值为传入值,返回值为采样后的索引
outlndex = randomR(np.arange(0, pf_Number), Weight[k, :])
# 得到新的样本
for i in np.arange(0, len(outlndex)):
Xm[:, i, k] = Xm[:, int(outlndex[i]), k]
# 滤波后的状态更新,更新参数[a,b,c,d]
Xpf[:, k] = [np.mean(Xm[0, :, k]),
np.mean(Xm[1, :, k]),
np.mean(Xm[2, :, k]),
np.mean(Xm[3, :, k])]
# 更新后的状态计算预测的容量值
Zpf[0, k] = hfun(Xpf[:, k], k)
# ========================================
# 计算自然条件下的预测值
# ========================================
start = N - Prediction_Interval # 预测的区间
Zf = np.zeros(Prediction_Interval) # 自然预测值
Xf = np.zeros(Prediction_Interval)
for k in np.arange(start-1, N-1):
Zf[k-start] = hfun(Xpf[:, start], k)
Xf[k-start] = k
# 画线
nax = [start, start]
nay = [0, 1]
plt.figure(figsize=(12, 9))
plt.title('Particle filter '+ Battery_name) # 折线图标题
plt.xlabel('Number of Cycles', fontsize=14)
plt.ylim((0, 1.1))
plt.ylabel(names[0], fontsize=14)
plt.plot(battery['cycle'], Z, markersize=3)
plt.plot(battery['cycle'], Zpf[0, :], markersize=3)
plt.plot(Xf, Zf, markersize=3)
plt.plot(nax, nay, linewidth=4)
plt.legend(['Measured value', 'pf Predictive value', 'Natural predicted value'])
plt.show()
Matlab的粒子滤波
main.m
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 版权声明:
% 本程序的详细中文注释请参考
% 黄小平,王岩,缪鹏程.粒子滤波原理及应用[M].电子工业出版社,2017.4
% 书中有原理介绍+例子+程序+中文注释
% 如果此程序有错误,请对提示修改
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 函数功能:粒子滤波用于电源寿命预测
% function main
load Battery_Capacity
%%load Battery_Capacity
N=length(A5Cycle);
% error('下面的参数M请参考书中的值设置,然后删除本行代码')
M=200; %%粒子数
Future_Cycle=100; % 未来趋势
if N>260
N=260; % 过滤大于260的数字
end
%过程噪声协方差Q
cita=1e-4;
wa=0.000001;wb=0.01;wc=0.1;wd=0.0001;
Q=cita*diag([wa,wb,wc,wd]);
%驱动矩阵
F=eye(4);
%观测噪声协方差
R=0.001;
a=-0.0000083499;b=0.055237;c=0.90097;d=-0.00088543;
X0=[a,b,c,d]';
%滤波器状态初始化
Xpf=zeros(4,N);
Xpf(:,1)=X0;
% 粒子集初始化
Xm=zeros(4,M,N);
for i=1:M
Xm(:,i,1)=X0+sqrtm(Q)*randn(4,1);
end
% 观测量
Z(1,1:N)=A12Capacity(1:N,:)';
Zm=zeros(1,M,N);
Zpf=zeros(1,N);
W=zeros(N,M);
%粒子滤波算法
for k=2:N
% 采样
for i=1:M
Xm(:,i,k)=F*Xm(:,i,k-1)+sqrtm(Q)*randn(4,1);
end
% 权值重要性计算
for i=1:M
Zm(1,i,k)=feval('hfun',Xm(:,i,k),k);
W(k,i)=exp(-(Z(1,k)-Zm(1,i,k))^2/2/R)+1e-99;
end,
W(k,:)=W(k,:)./sum(W(k,:));
% 重采样
outIndex = randomR(1:M,W(k,:)'); % 调用外部函数
% 得到新样本
Xm( :, :, k)=Xm( :, outIndex, k);
% 滤波后的状态更新
Xpf(:,k)=[mean(Xm(1,:,k));mean(Xm(2,:,k));mean(Xm(3,:,k));mean(Xm(4,:,k))];
% 更新后的状态计算
Zpf(1,k)=feval('hfun',Xpf(:,k),k);
end
%预测未来电容的趋势
start=N-Future_Cycle;
for k=start:N
Zf(1,k-start+1)=feval('hfun',Xpf(:,start),k);
Xf(1,k-start+1)=k;
end
Xreal=[a*ones(1,M);b*ones(1,M);c*ones(1,M);d*ones(1,M)];
figure
subplot(2,2,1);
hold on;box on;
plot(Xpf(1,:),'-r.');plot(Xreal(1,:),'-b.')
legend('粒子滤波后的a','平均值a')
subplot(2,2,2);
hold on;box on;
plot(Xpf(2,:),'-r.');plot(Xreal(2,:),'-b.')
legend('粒子滤波后的b','平均值b')
subplot(2,2,3);
hold on;box on;
plot(Xpf(3,:),'-r.');plot(Xreal(3,:),'-b.')
legend('粒子滤波后的c','平均值c')
subplot(2,2,4);
hold on;box on;
plot(Xpf(4,:),'-r.');plot(Xreal(4,:),'-b.')
legend('粒子滤波后的d','平均值d')
figure
hold on;box on;
plot(Z,'-b.')
plot(Zpf,'-r.')
plot(Xf,Zf,'-g.')
bar(start,1,'y')
legend('实验测量数据','滤波估计数据','自然预测数据')
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
hfun.m
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 版权声明:
% 本程序的详细中文注释请参考
% 黄小平,王岩,缪鹏程.粒子滤波原理及应用[M].电子工业出版社,2017.4
% 书中有原理介绍+例子+程序+中文注释
% 如果此程序有错误,请对提示修改
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 函数名称:电容的观测函数
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function Q=hfun(X,k)
Q=X(1)*exp(X(2)*k)+X(3)*exp(X(4)*k);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
randomR.m
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 版权声明:
% 本程序的详细中文注释请参考
% 黄小平,王岩,缪鹏程.粒子滤波原理及应用[M].电子工业出版社,2017.4
% 书中有原理介绍+例子+程序+中文注释
% 如果此程序有错误,请对提示修改
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function outIndex = randomR(inIndex,q);
if nargin < 2
error('Not enough input arguments.');
end
outIndex=zeros(size(inIndex));
[num,col]=size(q);
u=rand(num,1);
u=sort(u);
l=cumsum(q);
i=1;
for j=1:num
while (i<=num)&(u(i)<=l(j))
outIndex(i)=j;
i=i+1;
end
end
文章出处登录后可见!