概率论知识
- Random Value
- 随机变量:
- 随机变量的观测值(没有随机性):
:随机变量
的定义域
- 随机变量:
- Probability Density Function:随机变量在某个确定的取值点附近的可能性
- 概率密度函数:
- 连续分布:
- 离散分布:
- 概率密度函数:
- Expectation:函数
的期望
- 期望:
- 连续分布:
- 离散分布:
- 期望:
- Random Sampling
- 随机抽样
强化学习专业术语
- state:状态

- action:动作
-
agent:动作的发出者
-
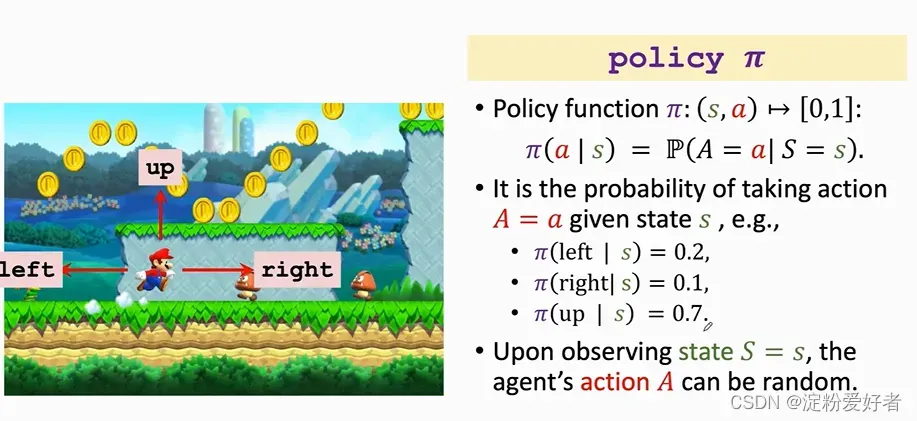
policy:策略
,根据观测到的状态做出决策来控制agent运动
- 强化学习学的就是policy函数
- agent动作随机,根据policy来做动作
-
reward:奖励
- agent做出一个动作后会得到一个奖励,通常需要自己定义
- 奖励定义的好坏十分影响强化学习的结果
- 强化学习的目标:获得的奖励总和尽量高
-
state transition:状态转移
- 当前状态下做出一个动作后转移到新的状态
- 状态转移可以是确定的也可以是随机的,通常是随机的(随机性来源于环境)
- 状态转移函数:
-
trajectory:轨迹 (state, action, reward)
-
-
agent与environment交互
- 环境给出当前state
- agent根据
做出动作
- 环境更新状态state为
,并给agent奖励
💡 状态、动作奖励等变量如果被观测到了就用小写字母表示,没被观测到就是随机变量用大写字母表示 - 环境给出当前state

强化学习的随机性来源
-
action
-
action是由policy函数随机抽样得到的
-
-
state transition
-
环境用状态转移函数
算出概率,用概率随机抽样得到下一个状态
-
Rewards, Returns & Value Fuctions
- Return:回报(aka cumulative future reward,即未来累计奖励)
时刻的回报
从
- 未来的奖励
没有现在的奖励
值钱→
- Discounted return:折扣回报(aka cumulative discounted future reward)
:折扣率,
,超参数,需要自己调
- 未来的权重和现在一样:
- 奖励越不重要,
- 未来的权重和现在一样:
- Value Function:价值函数
-
是随机变量,依赖于未来的所有动作
以及未来的所有状
-
Action-value Function:动作价值函数,与当前的状态
以及policy函数
- 直观意义:已知policy函数
给当前状态下所有的动作
打分,从而得知动作的好坏
- 直观意义:已知policy函数
-
Optimal action-value function:最优动作价值函数,对
- 直观意义:观测到状态
- 直观意义:观测到状态
-
State-value function:状态价值函数,对
求期望把
只与
有关
- 直观意义:
- 已知policy函数
- 判断policy函数
越大
- 已知policy函数
- 直观意义:
-
强化学习用AI控制agent
- Policy-based learning:策略学习,学习policy函数
,用
- 每观测到一个状态
- 用得到的概率做随机抽样得到
- agent执行动作
- 每观测到一个状态
- Value-based learning:价值学习,学习最优价值函数
,用
控制agent做动作
- 每观测到一个状态
- 选择让
- 每观测到一个状态
- 强化学习的任务就是学习
- 强化学习的目的是学会怎样控制agent,让agent根据当前的状态
- 常用标准库:OpenAI Gym https://gym.openai.com/
文章出处登录后可见!
已经登录?立即刷新