目录
(2条消息) 非常详细的相机标定原理、步骤(一)_An efforter的博客-CSDN博客
(2条消息) 非常详细的相机标定原理、步骤(二)_An efforter的博客-CSDN博客
(2条消息) 非常详细的相机标定原理(三)(张正友相机标定法初见和单应性矩阵)_An efforter的博客-CSDN博客
非常详细的相机标定(五)(相机标定代码讲解)_An efforter的博客-CSDN博客
一、回顾
1、相机成像几何模型,知道了如何将世界坐标系中的三维坐标和像素坐标系中的二维坐标联系起来。
2、我们根据标定棋盘图纸及其对应的照片已经可以得到单应矩阵H了。如下所示∶
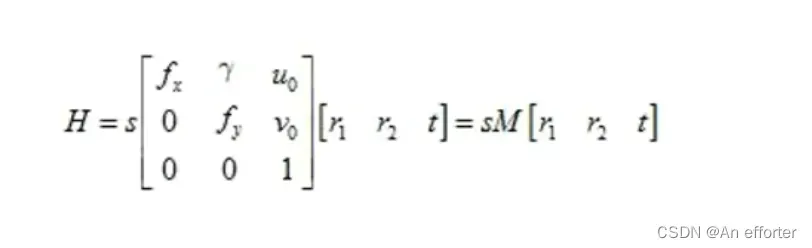
二、解释单应性矩阵H
1.H是内参矩阵和外参矩阵的混合体:
先把内参求出来(先求内参M是因为更容易),得到内参M后,外参也就随之解出了。
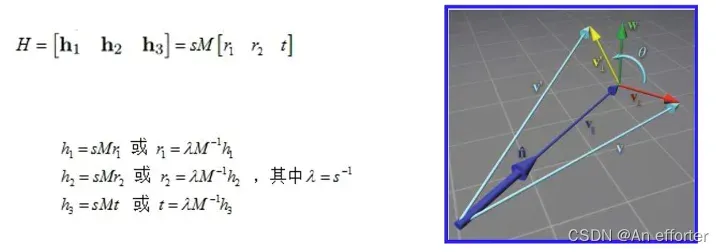
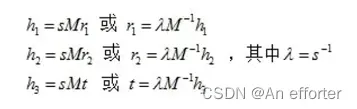
2.先不考虑镜头畸变:
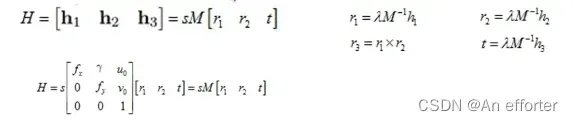
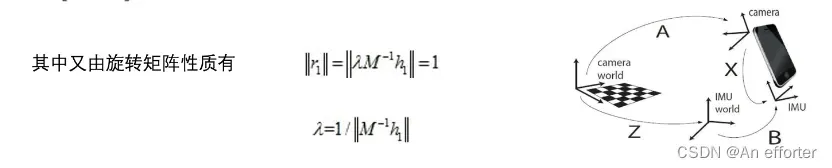
求解思路是利用旋转向量的约束关系
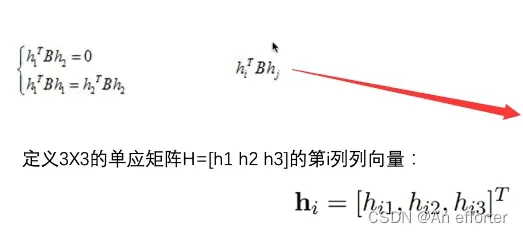
先将单应性矩阵H化为3个列向量H=[h1 h2 h3]
3.旋转向量在构造中是相互正交:
r1和r2相互正交.由此我们就可以利用“正交”的两个含义,得出每个单应矩阵提供的两个约束条件:
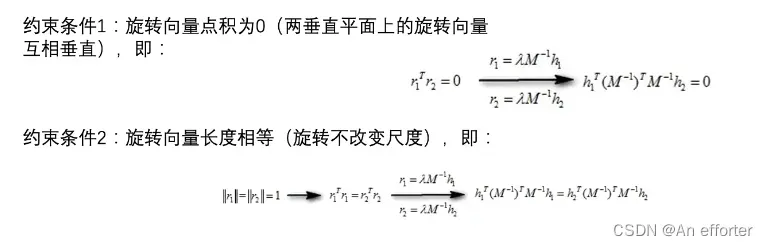
4.—个单应性矩阵H可以提供上述两个约束条件
那么如何利用上述两个约束条件求解内参或者外参呢?
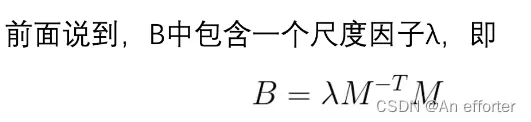
我们一步一步来看,由前面可知内参矩阵M:
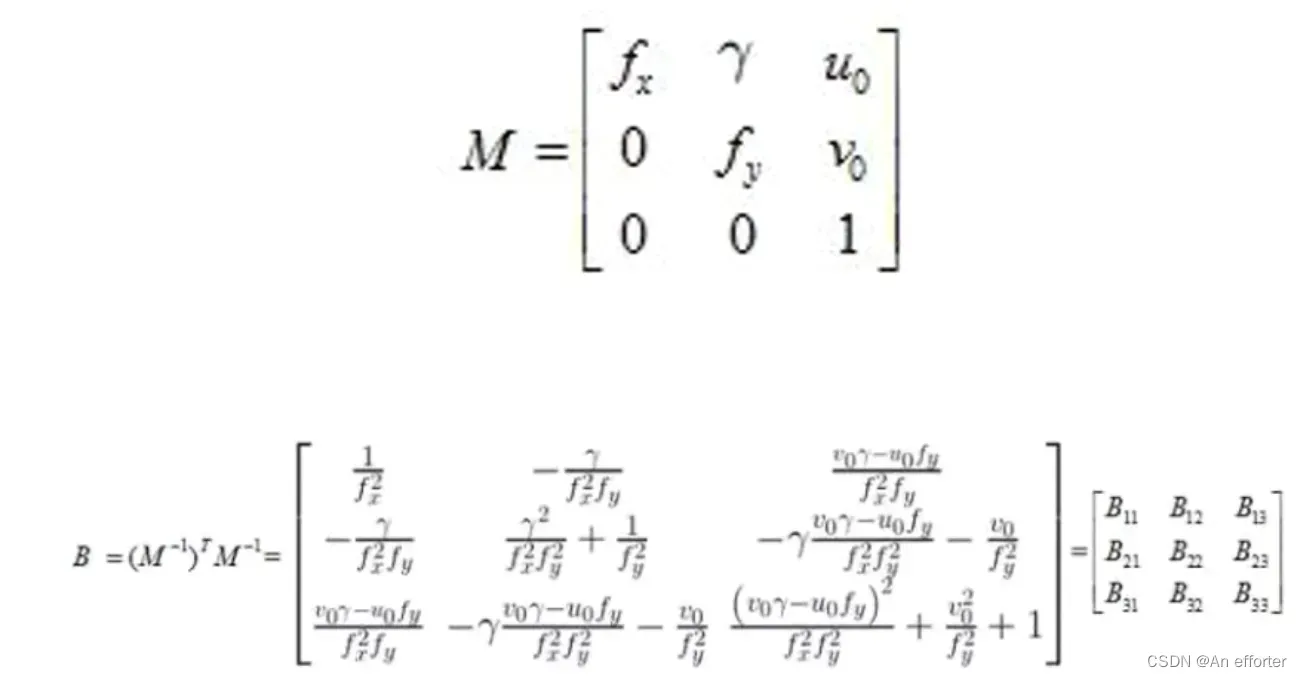
B为对称矩阵,真正有用的元素只有6个(主对角线任意―侧的6个元素)。
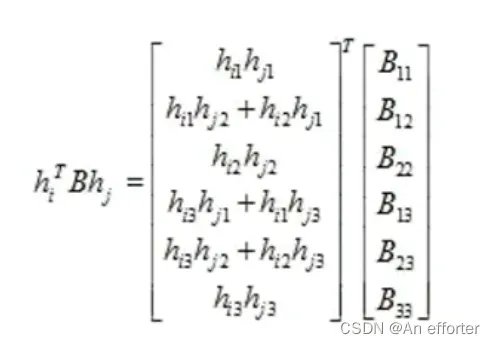
5.B带入前面两个约束条件后可转化为
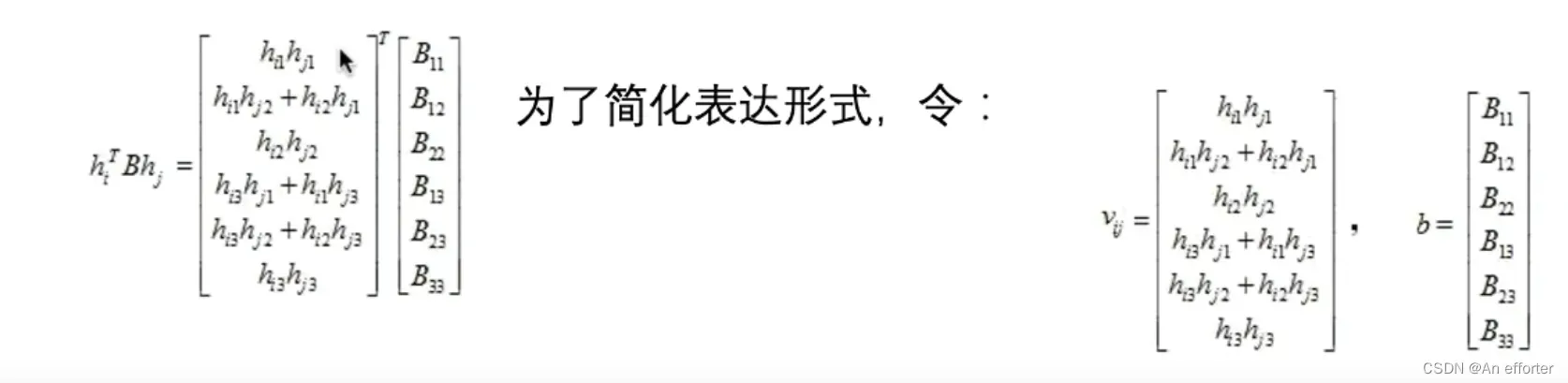
6.两约束条件最终可以转化为如下形式:
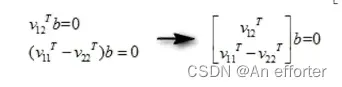
如果我们拍摄了n张不同角度的标定图片,因为每张图片我们都可以得到一组(2个)上述的等式。其中, v12,v11,v22可以通过前面已经计算好的单应矩阵得到,因此是已知的,而b中6个元素是待求的未知数。因此,至少需要保证图片数n>=3,我们才能解出b。
7.通过以上的公式推导做铺垫,求相机内参数。
根据n张不同角度的标定图片,最终我们得到了一个矩阵集合Vb=0,其中V是一个(2n x 6)的矩阵。如果n>=3,就可以得到唯一解b(带有一个比例因子)
假设我们已经根据前面计算得到了矩阵B元素的值,那么根据已知的矩阵B很容易解出内参,如下∶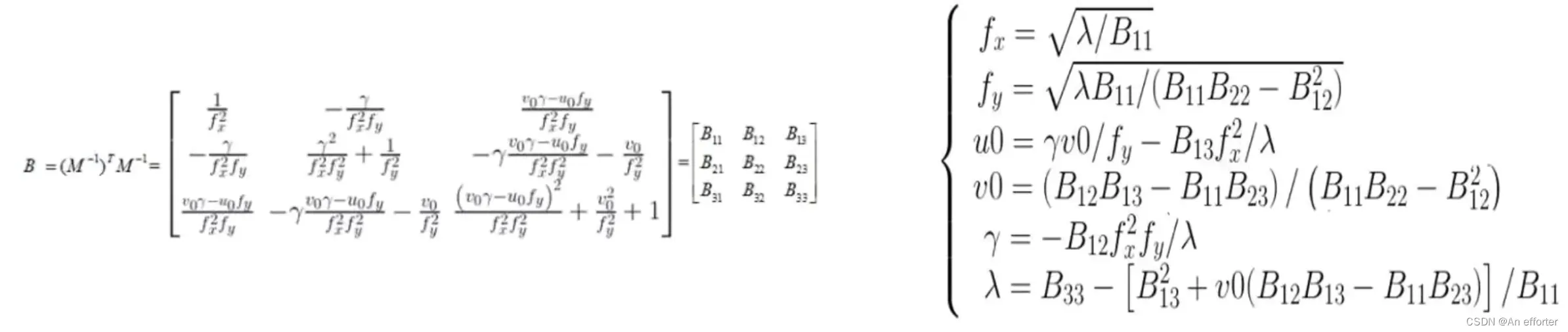
8. 求相机外参
得到内参数后,内参矩阵M也已知。单应矩阵H也已知,因此可继续求得外参数︰
以上的求解都是默认没有噪音的条件下的(理想条件下)。
9.奇异值分解
10. 考虑透镜畸变的影响
文章出处登录后可见!