目录
- 下载安装与基础知识
- 机器人工具箱下载安装
- 基本函数使用方法
- 位姿描述
- 建立机器人模型
- 机器人运动学
- 正运动学
- 逆运动学
- 关于正运动学的分析
- 关于逆运动学的分析
- 雅克比矩阵
- 带有移动关节的机器人
- 机器人工具箱自带的模型
- 建立自己的移动关节机器人模型
- 蒙特卡罗法的工作域分析
- 机器人动力学
- 查看模型动力学参数 R.dyn()
- 逆动力学 R.rne()
- 动力学方程
- 重力载荷 R.gravload()
- 关节空间惯性矩阵 R.inertia()
- 科氏力和向心力耦合矩阵 R.coriolis()
- 计算有效载荷 R.payload()
- 正向动力学
- 赋予机器人动力学参数
机器人工具箱其实以前上课的时候接触过,跟着老师的课件一步步的做过实验,但是课程结束后就没有再用过。。。
现在由于将来课题的原因,再加上老师要求学习的MBD课程要用到,所以来仔细学习一下。
❤ 2020.5.9 ❤
上了这么多年学,都没怎么学习过matlab,感觉血亏。不过该来的总是要来的,毕业课题加上MBD,让我不得不认真学一学matlab,虽然基本操作现在马马虎虎会了一点,可是各种工具箱才是matlab的精髓。
matlab最简洁的零基础教程:Matlab入门教程【基础向】
当然,这里讲的真的是太零基础了,以至于学过任何一种编程语言的人都会觉得简单,当然用来了解一下matlab的基础语法格式还是可以的。
下载安装与基础知识
机器人工具箱下载安装
matlab的机器人工具箱是个第三方工具箱,我试了在matlab的附加功能资源管理器里是没法直接下载的,只能去作者的官网下载。
作者名叫Peter Corke,其个人网站及机器人工具箱的官网为:
Peter Corke
作者针对工具箱还编写了一本书,可以算是工具箱的说明书了,在网站上可以直接下载英文版,还有中文官方版,只是官网上没有下载,当然除了买之外也有其他神奇的方法可以得到。。。
在作者的个人网站或者说机器人工具箱的官方网站下载好工具包后,解压复制到matlab的toolbox文件夹里
将路径复制到matlab的主窗口中,回车进入
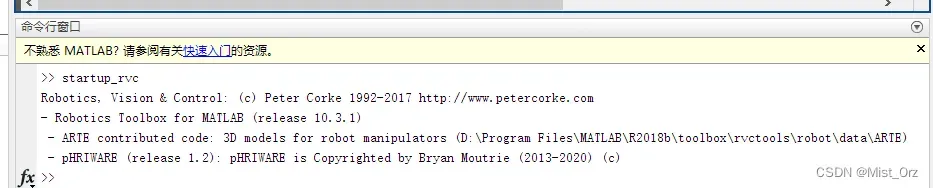
双击打开startup_rvc.m,点击运行
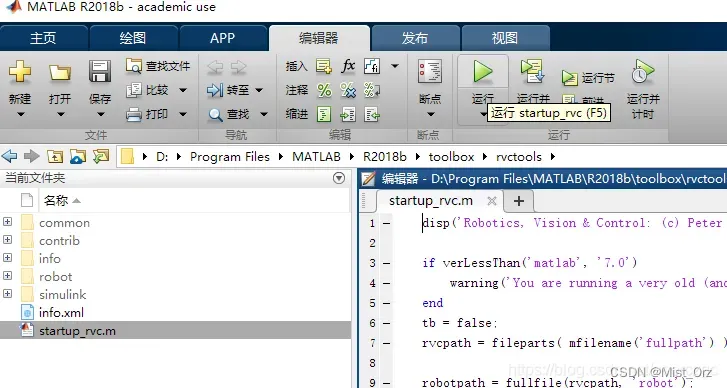
命令窗口提示如下,安装成功。
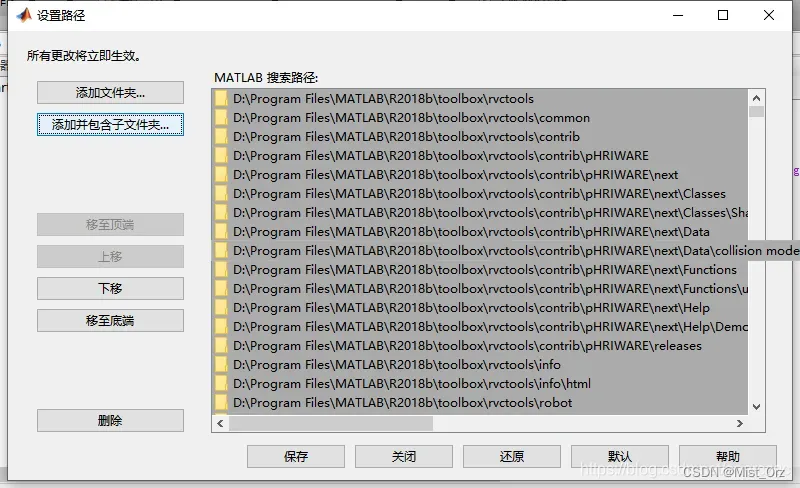
然后添加路径
在命令窗口输入 ver ,检测机器人工具箱是否安装成功
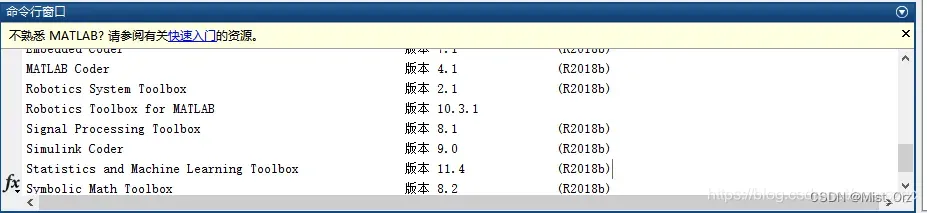
这样就是成功了。
还有一步不是必须的,但是MBD课程的文件里提到了,就是把机器人工具箱的功能块添加到simulink的library browser里,首先在MATLAB\R2018b\toolbox\rvctools\simulink下建立一个脚本文件slblocks.m,然后添加如下内容
function blkStruct = slblocks
%SLBLOCKS Defines a block library.
% Library's name. The name appears in the Library Browser's
% contents pane.
blkStruct.Name = ['Robot' sprintf('\n') 'ToolBox'];
% The function that will be called when the user double-clicks on
% the library's name. ;
blkStruct.OpenFcn = 'roblocks';
% The argument to be set as the Mask Display for the subsystem. You
% may comment this line out if no specific mask is desired.
% Example: blkStruct.MaskDisplay = 'plot([0:2*pi],sin([0:2*pi]));';
% No display for now.
% blkStruct.MaskDisplay = '';
% End of blocks
运行,显示如下内容应该就是成功了
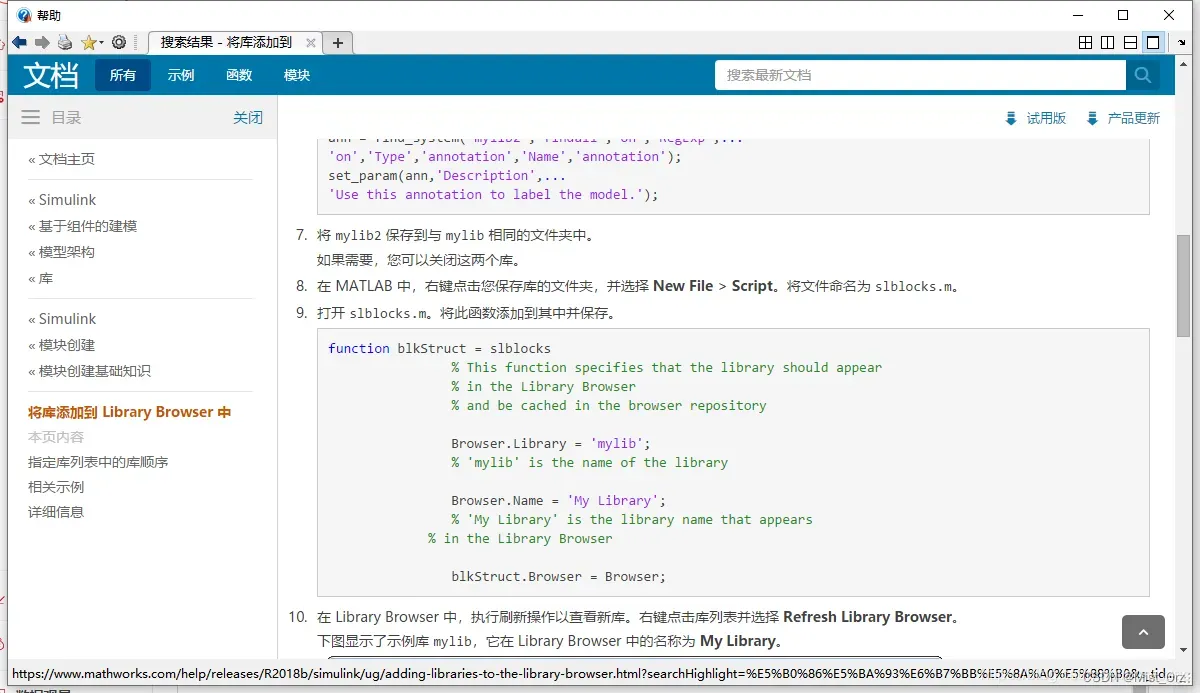
这个文件的作用可以参照matlab的帮助文件,“将库添加到 Library Browser 中”字段,但是这个脚本的内容和帮助文件还是有很大差别的,毕竟这个脚本是mbd课程提供的软件包里的机器人工具箱里提供的,反正能用
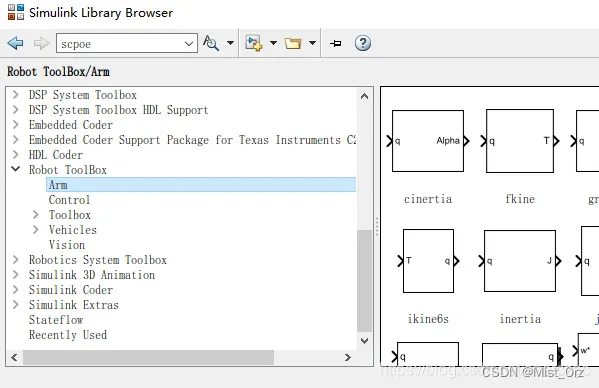
好了,启动simulink,然后就可以在library browser里面找到robot toolbox的内容了
❤ 2020.5.10 ❤
下面记录一下机器人工具箱的基本功能使用方法,内容来源见
→→→劉海濤LHT
这是系列的第一集,剩下的我就不贴了
基本函数使用方法
位姿描述
〇 二维空间位姿描述
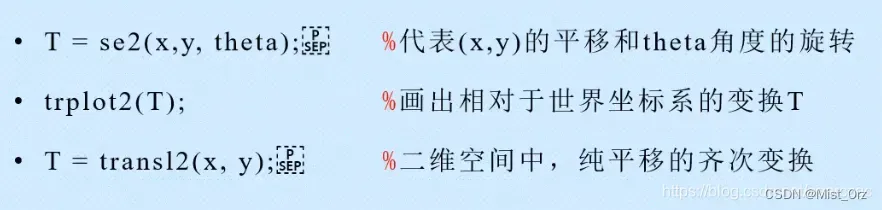
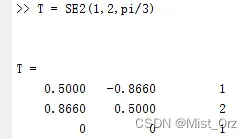
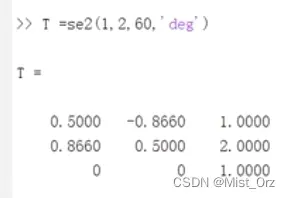
SE2()函数的旋转角使用角度制,如pi/3这样的数据。注意SE要大写(至少我的小写是不行的),当需要使用角度制数据时要写成T=SE2(1,2,60,‘deg’)的格式。
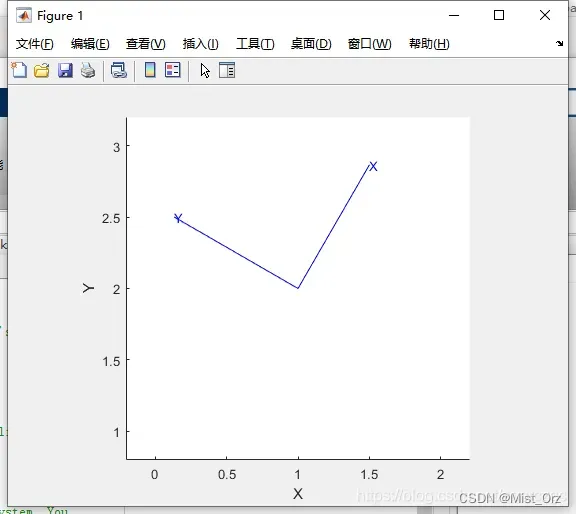
trplot2()函数的参数为SE2()函数生成的旋转矩阵,生成旋转后的坐标。
※ 如果需要用角度制表示则写成这样
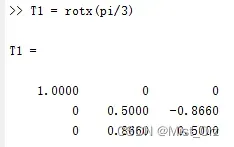
〇 三维空间位姿描述
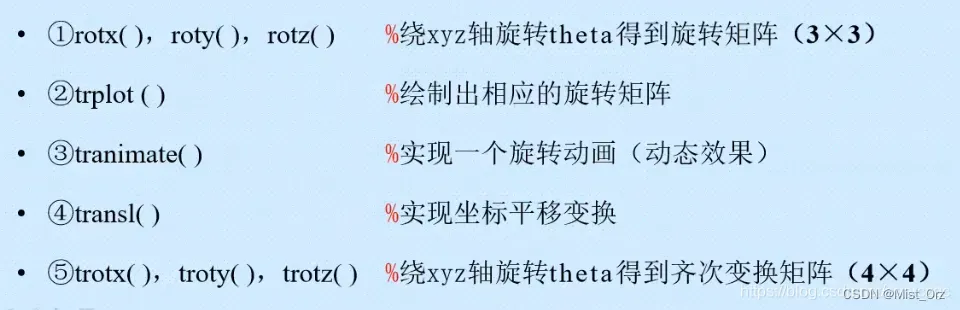
rotx/roty/rotz是绕轴转动指定角度生成三维变换矩阵,如果用角度制要加’deg’。
trplot是三维空间的绘图指令。
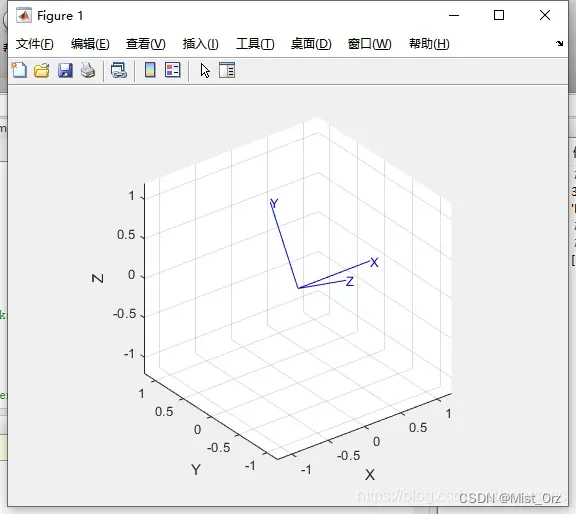
tranimate()是把变换动作用动画显示出来。
transl()是三维空间平移。
trotx/torty/trotz是三维齐次变换矩阵,输出的是4×4的矩阵,除了矩阵中除了表示旋转角度的3×3矩阵之外还有一个1。

建立机器人模型
〇 Link类
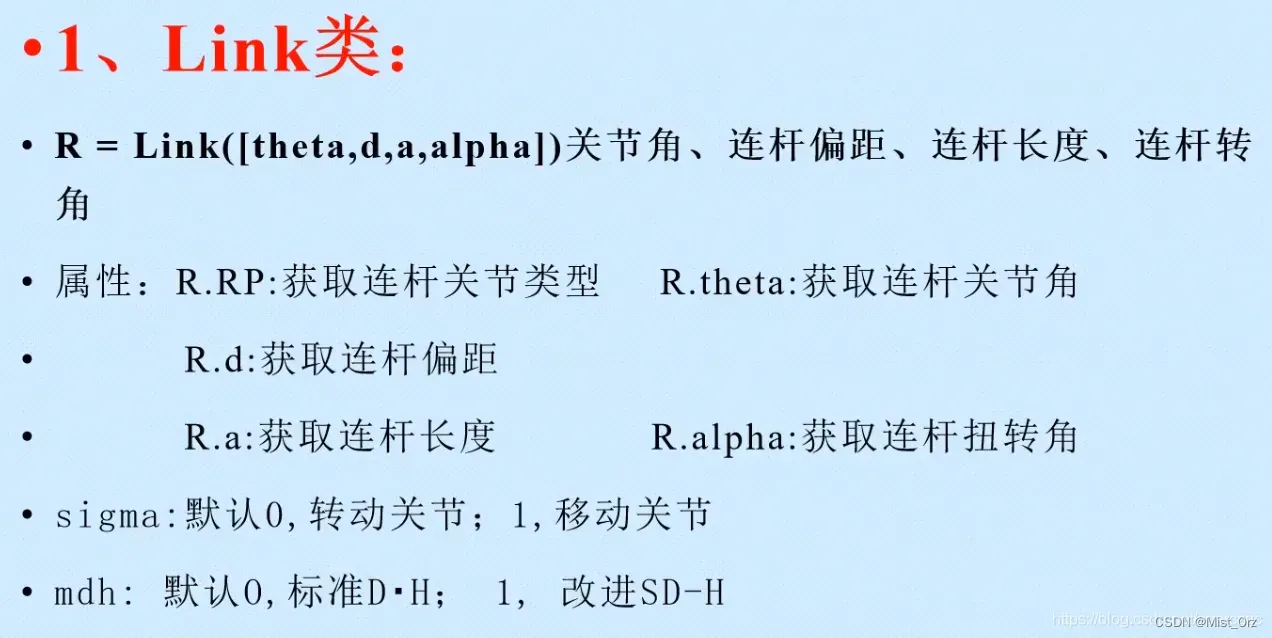
Link()函数的作用是在matlab中建立机器人的DH参数,首先需要对机器人的DH参数进行建模,当然这就是机器人学的内容了,等我有机会再详细写一个机器人学的学习笔记。
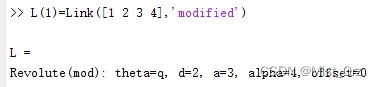
单个关节的link函数效果如下。注意使用改进DH方法时必须加’modified’,不然默认使用标准DH。
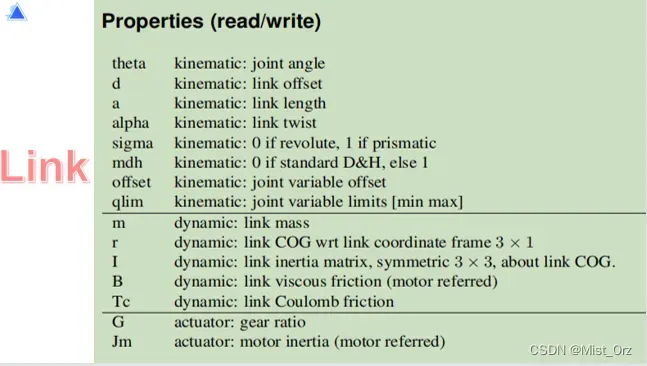
建立link之后可以查询link的属性,比如查询关节类型

可以查询的属性参见图片。sigma是干嘛的我还不知道,教程里没说
〇 SerialLink类
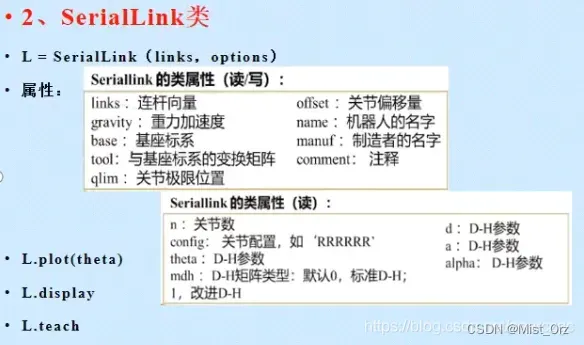
用来把定义好的连杆整合成一个机器人。
比如运行这样一个脚本,先定义6个连杆,再将连杆整合
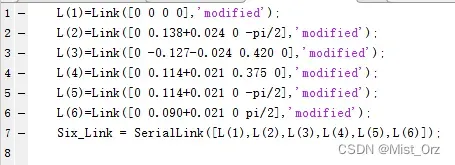
然后可以通过指令查询Six_Link的属性,比如
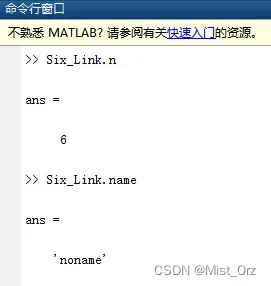
属性的类型从上图查询。
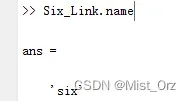
属性可以再定义之后修改,也可以在定义的时候添加,比如
![]()
然后再查询
关于.plot(theta),这个是一个重要的绘图指令,通过制定各个关节角的角度来显示机器人的位置,比如
![]()
可以得到图像
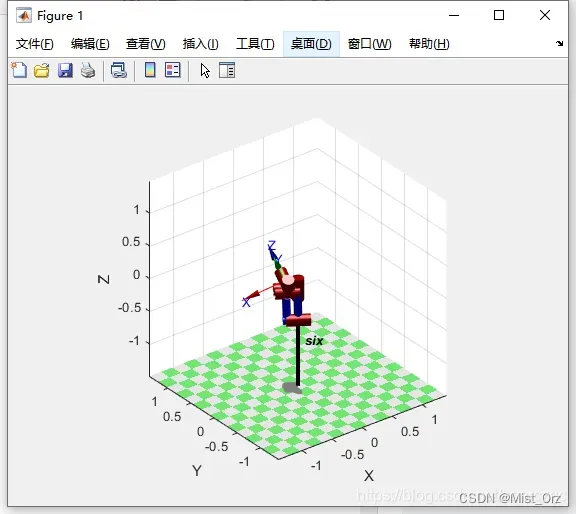
不要在意这些扭曲的关节。
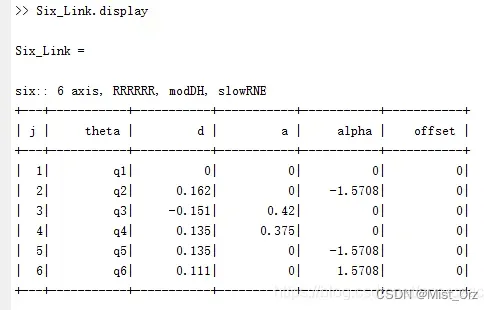
关于.display,就是把这个机器人的参数全展示出来
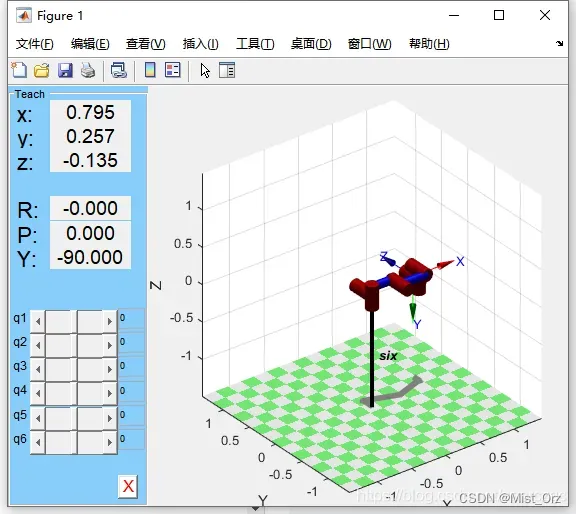
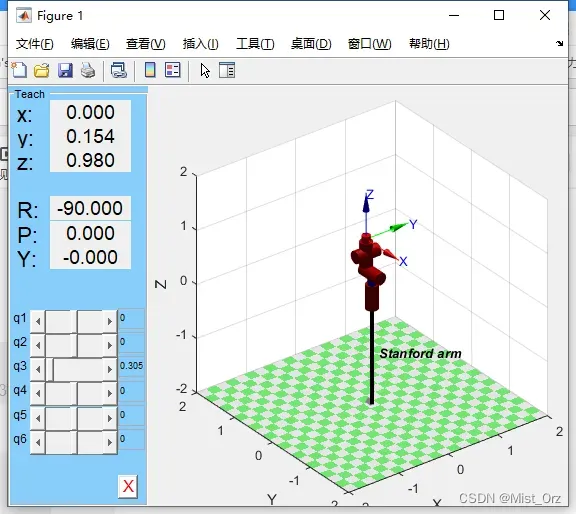
关于.teach,就是示教模式,图形示教器,输入
![]()
之后,会显示这么一个东西,可以在里面改变各个关节的角度。
机器人运动学
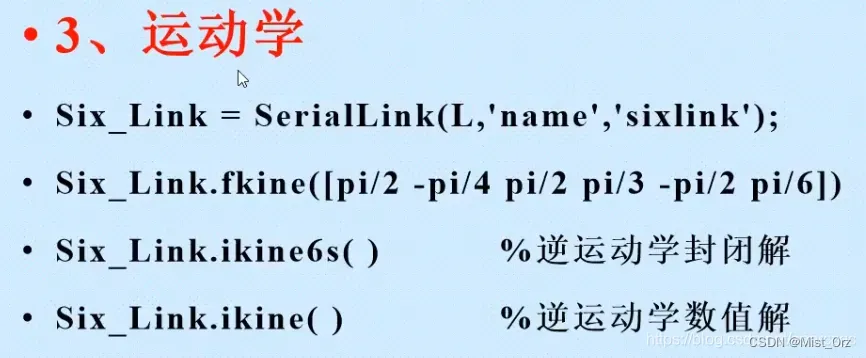
正运动学
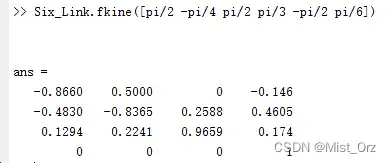
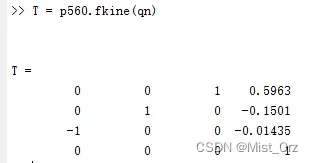
关于.fkine()命令是运动学正解,生成对应关节角度的末端其次变换矩阵,比如
逆运动学
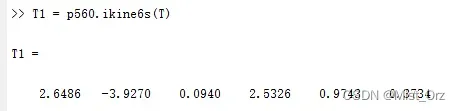
关于.ikine6s()yu.ikine(),这两个都是求运动学的逆解,有6s的是封闭解,这个指令只能应用于标准型DH建模方法建立的模型,如果用的改进DH会报错,不知道为什么。。。

然后用.ikine(),可是。。。
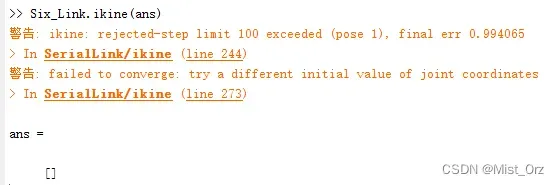
应该是模型建立的问题,不过视频里说这个函数就是有问题的,如果想实现反解运算还需要自己写函数。。。我去。。。
先继续吧。
(↓↓↓↓↓↓↓↓↓↓2023.10.24更新↓↓↓↓↓↓↓↓↓↓
经过询问大佬和自己测试,ikine()这个函数求解改进DH模型机器人的逆解是没有问题的,为了保证结果唯一,最好使用预估值这个参数,在轨迹规划中也就是上一个点对应的角度,然后当前的位姿矩阵也需要按照机器人工具箱指定的格式来建立。
q_initial_guess = [9 9 9 9 9 9]; % 初始关节角度估计值
q_solutions = ZK500.ikine(T_f, q_initial_guess);
其中T_f是通过机器人工具箱的正解得到的位姿矩阵
↓↓↓↓↓↓↓↓↓↓2023.10.24更新↑↑↑↑↑↑↑↑↑↑)
☆ 一个赞破
以matlab内置的puma560模型为例
首先打开puma560

如图所示是puma560的一些参数和指令
可以用绘图指令画一画,比如
![]()
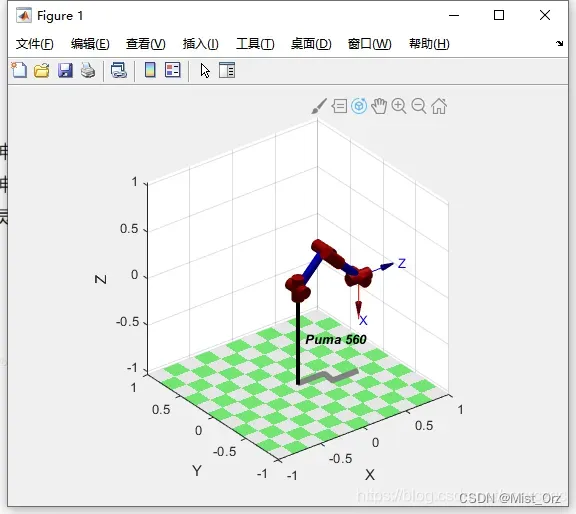
运动学正解
运动学反解封闭解
运动学反解数值解
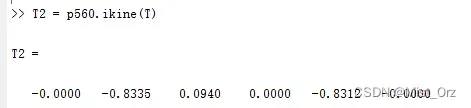
震惊,居然不一样。。。
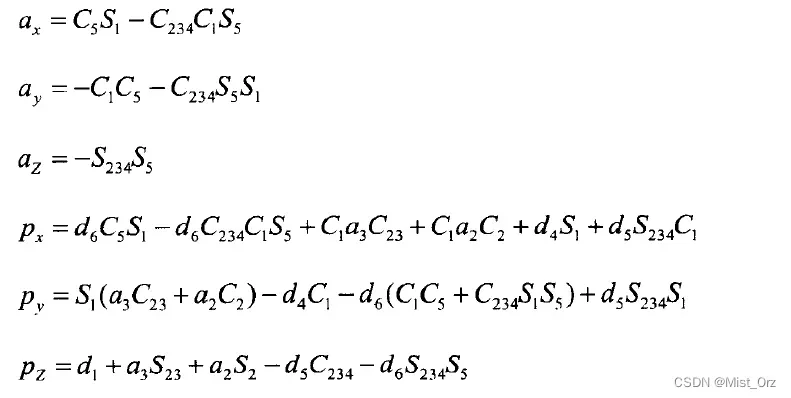
关于正运动学的分析
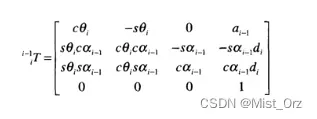
根据论文《协作机器人零力控制与碰撞检测技术研究》_陈赛旋
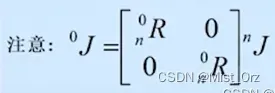
〇 根据表达式判断所建立的DH模型是标准型(Standard DH)还是改进型(Modified DH)
第三四行的首元素为0的是标准型
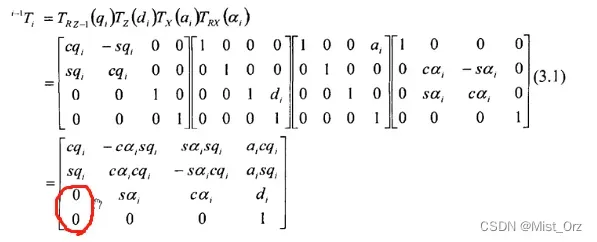
长成这样的是改进型
〇 机器人逆解脚本程序编写
1、把推导出来的变换矩阵在脚本文件中表示出来
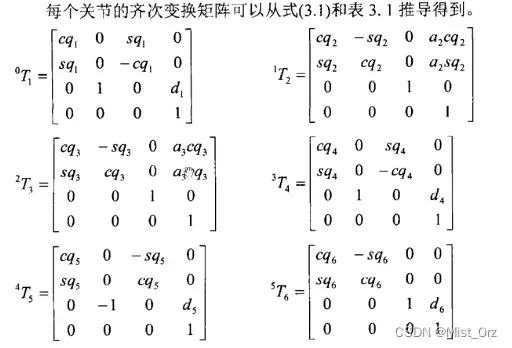
syms a2 a3 d1 d4 d5 d6 theta1 theta2 theta3 theta4 theta5 theta6
T01 = [ cos(theta1) 0 sin(theta1) 0;
sin(theta1) 0 -cos(theta1) 0;
0 1 0 d1;
0 0 0 1];
T12 =[ cos(theta2) -sin(theta2) 0 a2*cos(theta2);
sin(theta2) cos(theta2) 0 a2*sin(theta2);
0 0 1 0;
0 0 0 1];
T23 =[ cos(theta3) -sin(theta3) 0 a3*cos(theta3);
sin(theta3) cos(theta3) 0 a3*sin(theta3);
0 0 1 0;
0 0 0 1];
T34 = [ cos(theta4) 0 sin(theta4) 0;
sin(theta4) 0 -cos(theta4) 0;
0 1 0 d4;
0 0 0 1];
T45=[ cos(theta5) 0 -sin(theta5) 0;
sin(theta5) 0 cos(theta5) 0;
0 -1 0 d5;
0 0 0 1];
T56=[ cos(theta6) -sin(theta6) 0 0;
sin(theta6) cos(theta6) 0 0;
0 0 1 d6;
0 0 0 1];
T=T01*T12*T23*T34*T45*T56
2、将矩阵化简
用simplify()函数

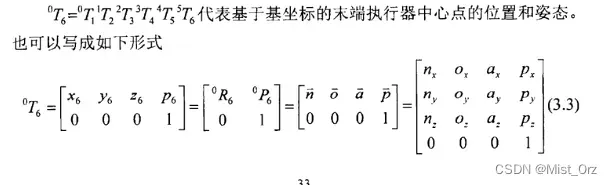
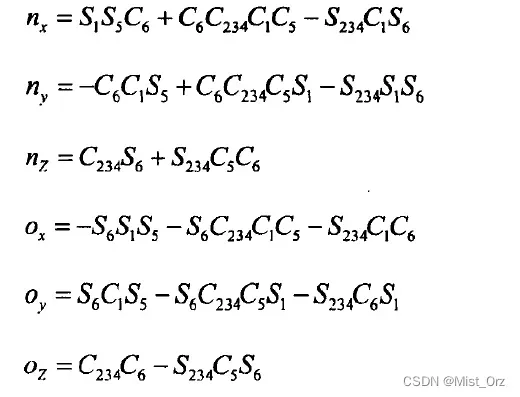
关于逆运动学的分析
通过左乘T01的逆,构造4×4个方程
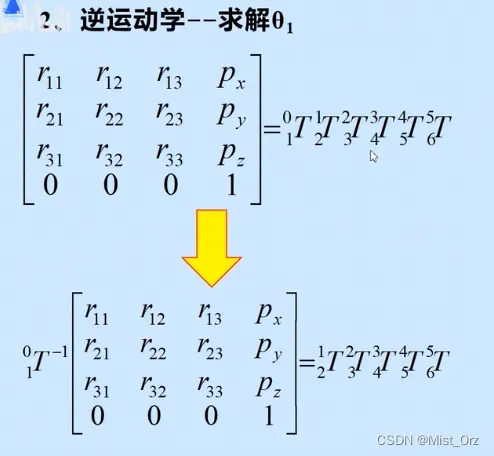
syms a2 a3 d1 d4 d5 d6 theta1 theta2 theta3 theta4 theta5 theta6 nx ny nz ox oy oz ax ay az px py pz
T01 = [ cos(theta1) 0 sin(theta1) 0;
sin(theta1) 0 -cos(theta1) 0;
0 1 0 d1;
0 0 0 1];
T12 =[ cos(theta2) -sin(theta2) 0 a2*cos(theta2);
sin(theta2) cos(theta2) 0 a2*sin(theta2);
0 0 1 0;
0 0 0 1];
T23 =[ cos(theta3) -sin(theta3) 0 a3*cos(theta3);
sin(theta3) cos(theta3) 0 a3*sin(theta3);
0 0 1 0;
0 0 0 1];
T34 = [ cos(theta4) 0 sin(theta4) 0;
sin(theta4) 0 -cos(theta4) 0;
0 1 0 d4;
0 0 0 1];
T45=[ cos(theta5) 0 -sin(theta5) 0;
sin(theta5) 0 cos(theta5) 0;
0 -1 0 d5;
0 0 0 1];
T56=[ cos(theta6) -sin(theta6) 0 0;
sin(theta6) cos(theta6) 0 0;
0 0 1 d6;
0 0 0 1];
TT=[ nx oz ax pz;
ny oy ay py;
nz oz az pz;
0 0 0 1];
T1=inv(T01)*TT
T2=T01*T12*T23*T34*T45*T56
化简T1、T2

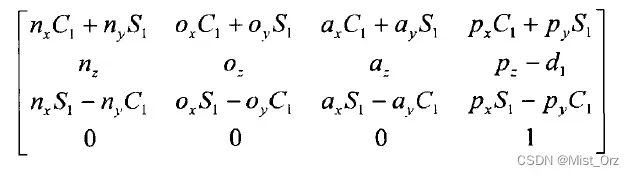


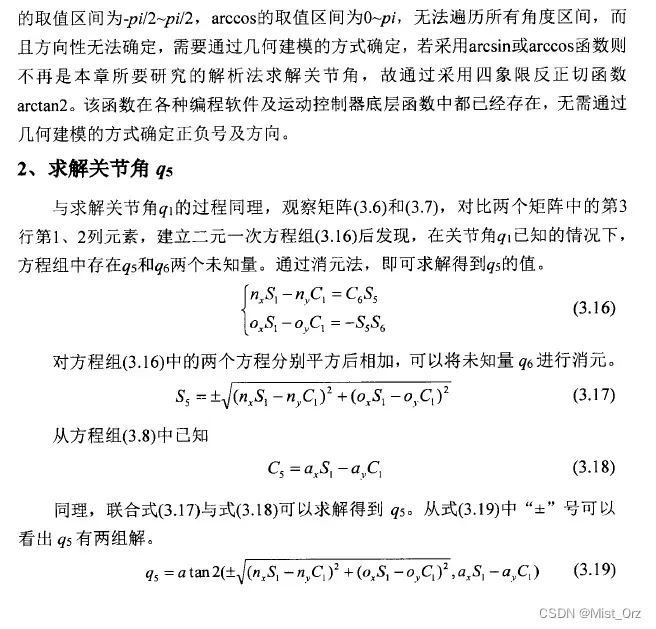
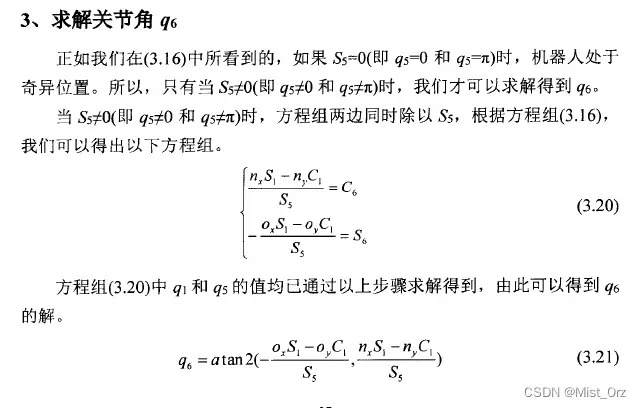
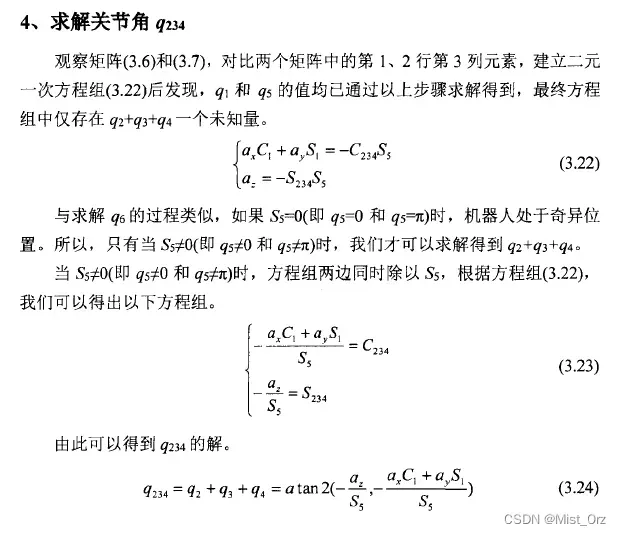
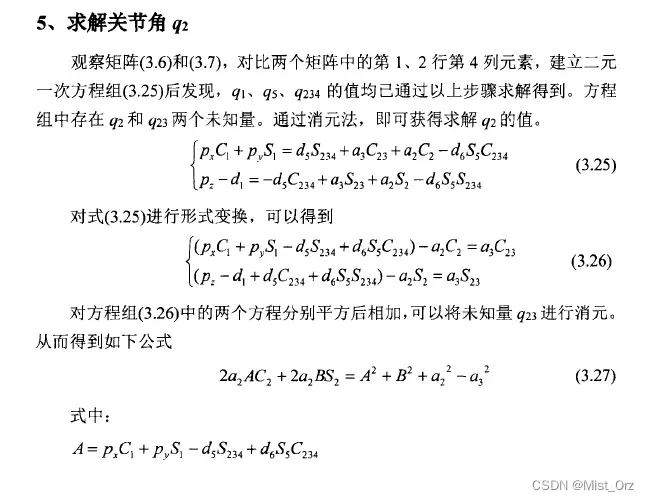
(以下全是论文原文)
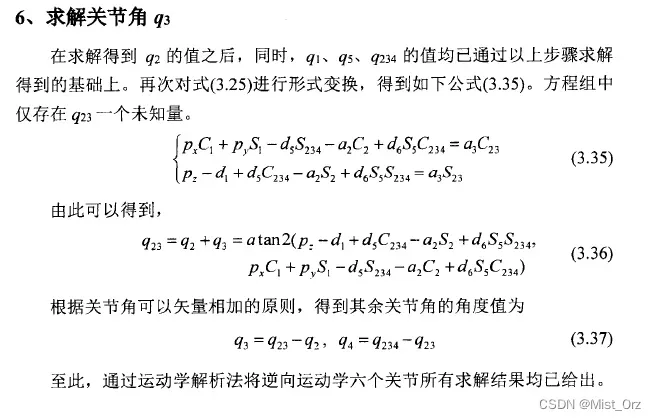
求解关节角
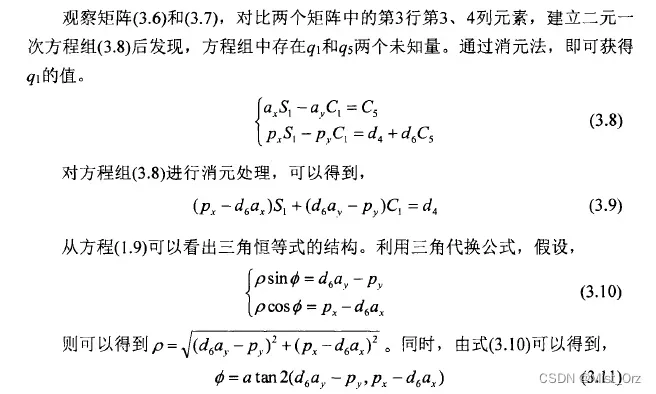
注意atan2()是个很重要的函数,在这里求解必须用这个,老师说的我也没太明白



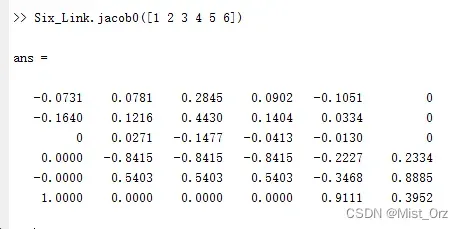
雅克比矩阵
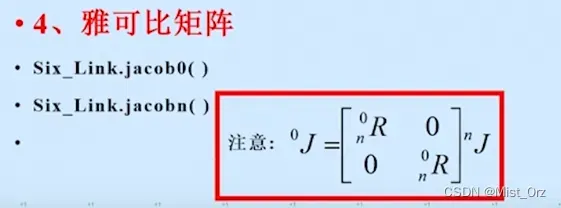
先建立机器人模型然后
.jacob0():针对基坐标
.jacobn():针对工具坐标
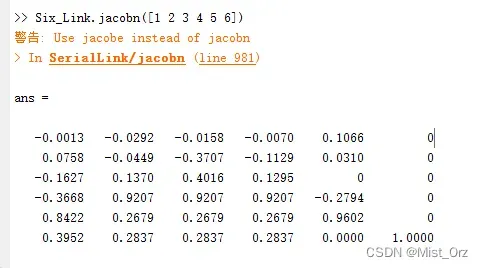
两者可以转化
❤ 2022.6.8 ❤
带有移动关节的机器人
机器人工具箱自带的模型
![]()
可以查看该机器人的动画
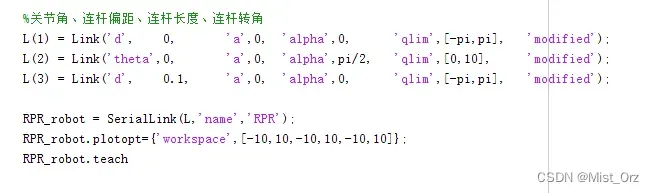
建立自己的移动关节机器人模型
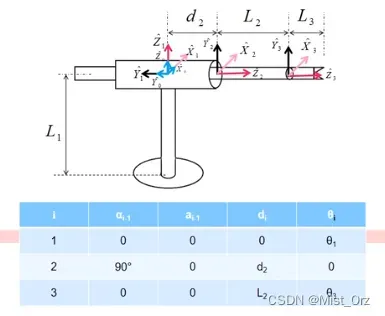
※ 注意:在建立模型的过程中,Link()函数里面“d”和“theta”谁是变量就不写谁。
%关节角、连杆偏距、连杆长度、连杆转角
L(1) = Link('d', 0, 'a',0, 'alpha',0, 'qlim',[-pi,pi], 'modified');
L(2) = Link('theta',0, 'a',0, 'alpha',pi/2, 'qlim',[0,10], 'modified');
L(3) = Link('d', 0.1, 'a',0, 'alpha',0, 'qlim',[-pi,pi], 'modified');
RPR_robot = SerialLink(L,'name','RPR');
RPR_robot.plotopt={'workspace',[-10,10,-10,10,-10,10]};
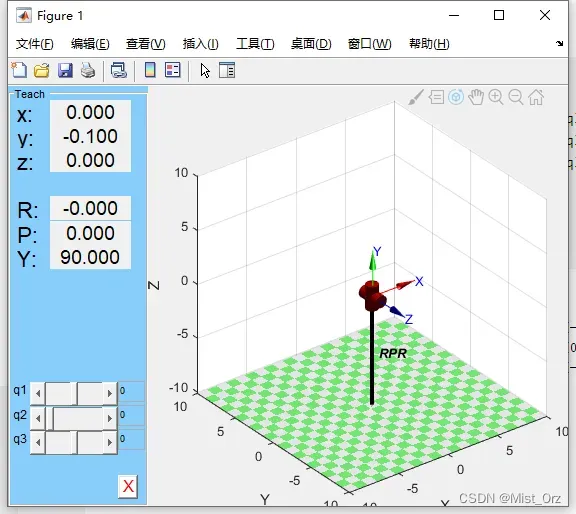
RPR_robot.teach
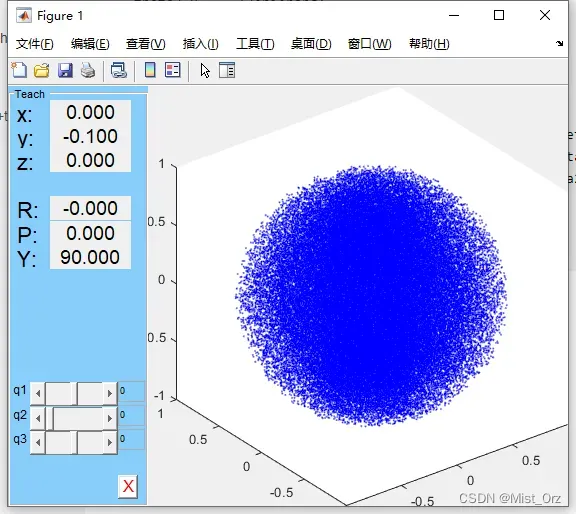
蒙特卡罗法的工作域分析
〇 蒙特卡罗法
代码
%定义D-H参数
a2= 0.420;
a3= 0.375;
d2= 0.138+0.024;
d3=-0.127-0.024;
d4= 0.114+0.021;
d5= 0.114+0.021;
d6= 0.090+0.021;
%定义出XYZ的坐标值。
for i=1:100000
theta1=-pi +2*pi*rand;
theta2=0 +2*pi*rand;
theta3=-(5/6)*pi+(5/3)*pi*rand;
theta4=-pi +2*pi*rand;
theta5=-pi +2*pi*rand;
theta6=-pi +2*pi*rand;
x(i)= a2*cos(theta1)*cos(theta2)+a3*cos(theta1)*cos(theta2+theta3)-d5*cos(theta1)*sin(theta2+theta3+theta4)-sin(theta1)*(d2+d3+d4)-d6*(cos(theta5)*sin(theta1)-cos(theta1)*cos(theta2+theta3+theta4)*sin(theta5));
y(i)=d6*(cos(theta1)*cos(theta5)+cos(theta2+theta3+theta4)*sin(theta1)*sin(theta5))+a3*sin(theta1)*cos(theta2+theta3)-d5*sin(theta1)*sin(theta2+theta3+theta4)+cos(theta1)*(d2+d3+d4)+a2*cos(theta2)*sin(theta1);
z(i)=-a3*sin(theta2+theta3)-a2*sin(theta2)-d5*cos(theta2+theta3+theta4)-d6*sin(theta5)*sin(theta2+theta3+theta4);
end
plot3(x,y,z,'b.','MarkerSize',0.5)
运行结果
机器人动力学
〇 工具箱中与动力学相关的方程
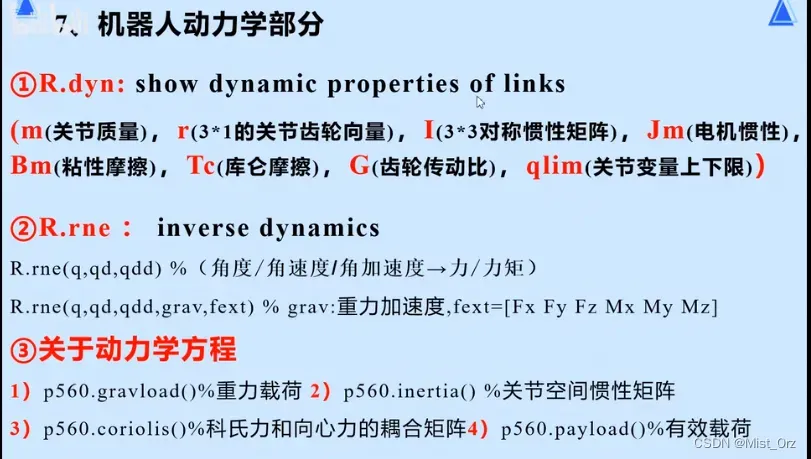
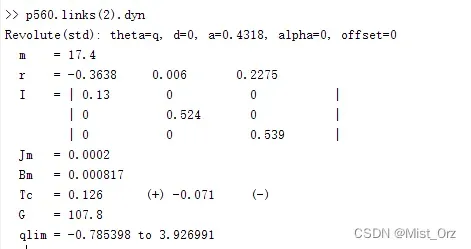
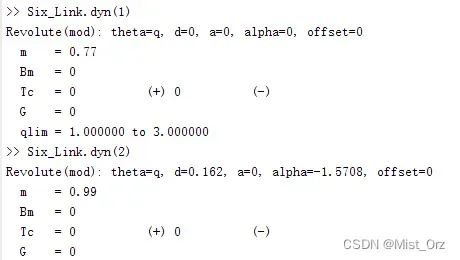
查看模型动力学参数 R.dyn()

然后就会显示出每个关节的参数
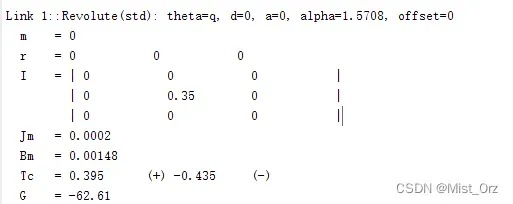
2-6略
也可以显示单个关节的参数
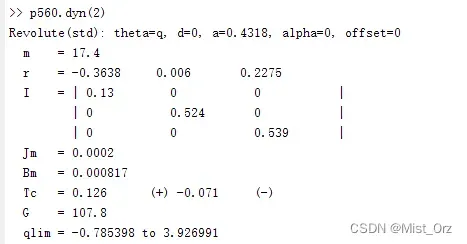
或
逆动力学 R.rne()

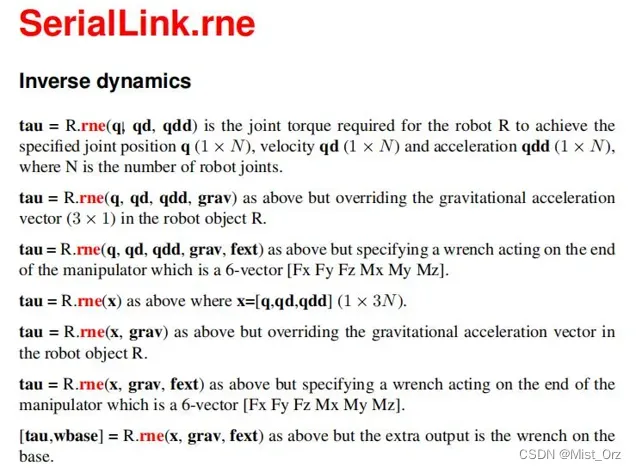
〇 举例
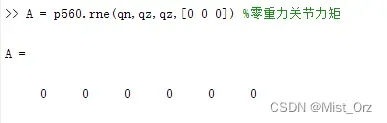
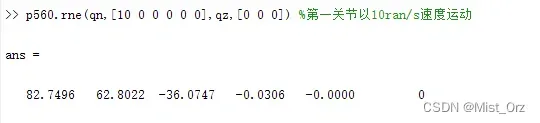
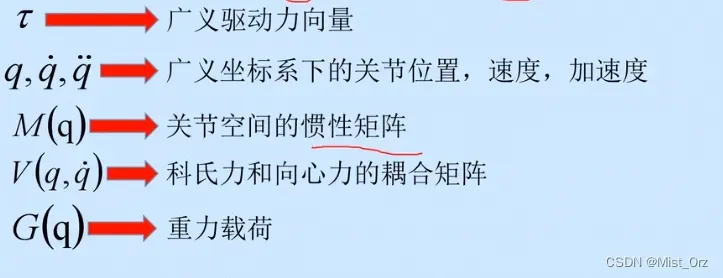
动力学方程
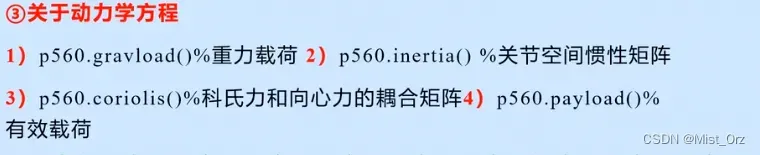

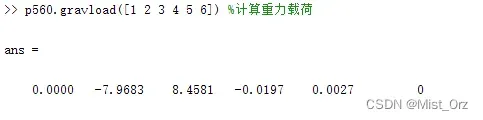
重力载荷 R.gravload()
计算重力载荷,参数为所求关节位置,结果是个向量
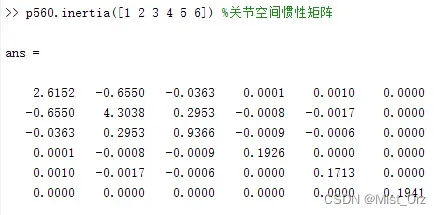
关节空间惯性矩阵 R.inertia()
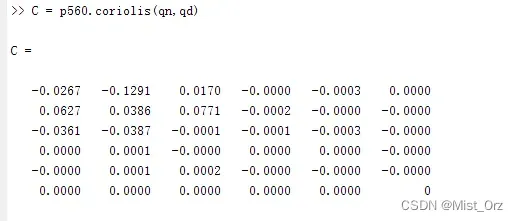
科氏力和向心力耦合矩阵 R.coriolis()
先给定一个速度
qn是模型里的当前位置
计算有效载荷 R.payload()
先计算没有加载时的惯性矩阵
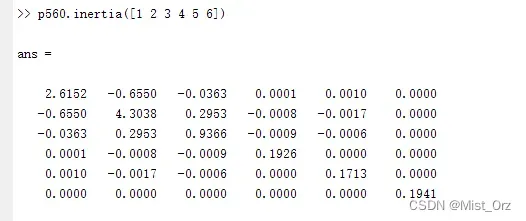
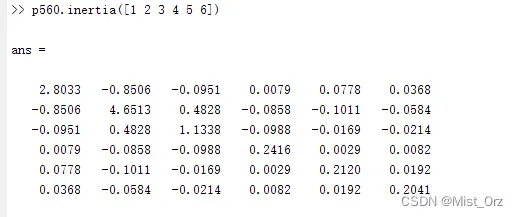
加载有效载荷
![]()
再计算惯性矩阵,发现数值改变了
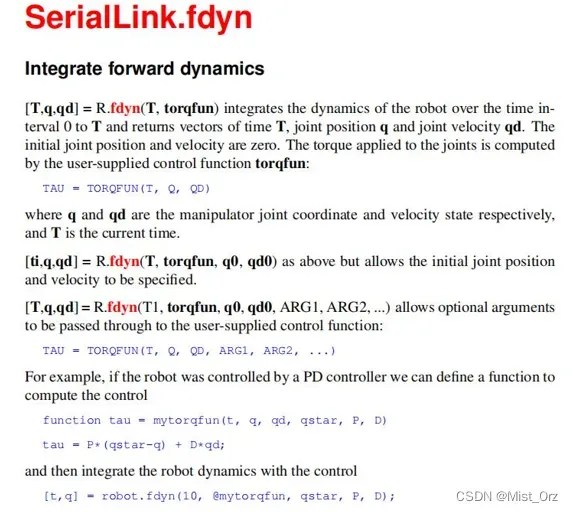
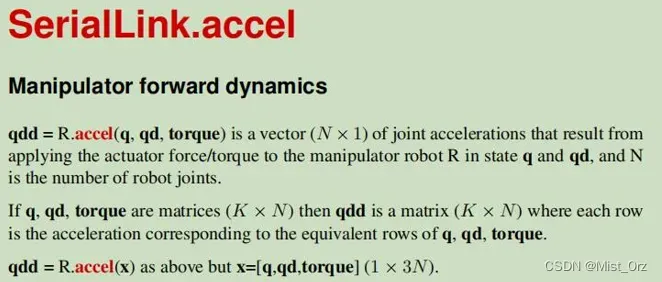
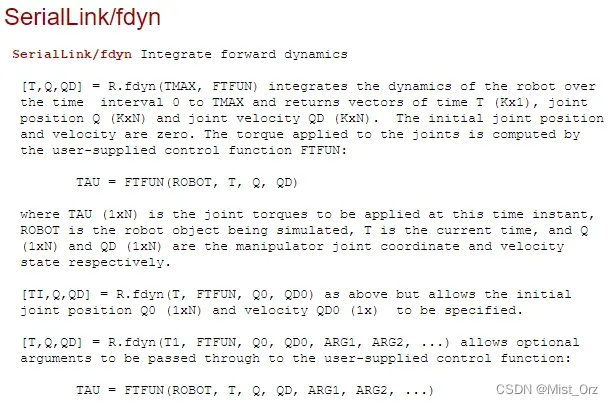
正向动力学
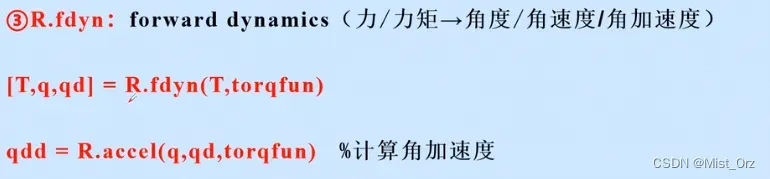
〇 例子
mdl_puma560;
torqfun = [1 2 3 4 5 6];
p560 = p560.nofriction();%没有摩擦的动力学模型,加快求解速度
[T,q,qd] = p560.fdyn(1,torqfun)
for kk = 1:65
qdd(kk,:) = p560.accel(q(kk,:),qd(kk,:),torqfun);
end
正常可以算出关节的加速度
但是报错了
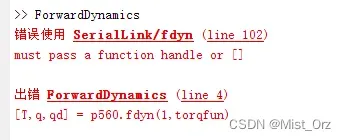
查了一下好像新版本的fdyn()函数有点不一样
没看太懂,等需要用的到的时候再说吧。
赋予机器人动力学参数
首先建立DH模型
L(1)= Link([0 0 0 0],'modified');
L(2)= Link([0 0.138+0.024 0 -pi/2],'modified');
L(3)= Link([0 -0.127-0.024 0.420 0], 'modified');
L(4)= Link([0 0.114+0.021 0.375 0],'modified');
L(5)= Link([0 0.114+0.021 0 -pi/2],'modified');
L(6)= Link([0 0.090+0.021 0 pi/2],'modified');
Six_Link=SerialLink(L,'name','sixlink');
然后按照文档添加动力学参数
L(1).m = 0.77;
L(2).m = 0.99;
L(1).qlim = [1,3];
然后再查看动力学参数
文章出处登录后可见!