AIGC专栏9——Scalable Diffusion Models with Transformers (DiT)结构解析
- 学习前言
- 源码下载地址
- 网络构建
-
- 一、什么是Diffusion Transformer (DiT)
- 二、DiT的组成
- 三、生成流程
-
- 1、采样流程
-
- a、生成初始噪声
- b、对噪声进行N次采样
- c、单次采样解析
-
- I、预测噪声
- II、施加噪声
- d、预测噪声过程中的网络结构解析
-
- i、adaLN-Zero结构解析
- ii、patch分块处理
- iii、Transformer特征提取
- iv、上采样
- 3、隐空间解码生成图片
- 类别到图像预测过程代码
学习前言
近期Sora大火,它底层是Diffusion Transformer,本质上是使用Transformer结构代替原本的Unet进行噪声预测,好处是统一了文本生成与视频生成的结构。这训练优化和预测优化而言是个好事,因为只需要优化一种结构就够了。虽然觉得OpenAI是大力出奇迹,但还是得学!

源码下载地址
https://github.com/bubbliiiing/DiT-pytorch
喜欢的可以点个star噢。
网络构建
一、什么是Diffusion Transformer (DiT)
DiT基于扩散模型,所以不免包含不断去噪的过程,如果是图生图的话,还有不断加噪的过程,此时离不开DDPM那张老图,如下:

DiT相比于DDPM,使用了更快的采样器,也使用了更大的分辨率,与Stable Diffusion一样使用了隐空间的扩散,但可能更偏研究性质一些,没有使用非常大的数据集进行预训练,只使用了imagenet进行预训练。
与Stable Diffusion不同的是,DiT的网络结构完全由Transformer组成,没有Unet中大量的上下采样,结构更为简单清晰。
本文主要是解析一下整个DiT模型的结构组成,并简单一次扩散,多次扩散的流程。本文代码来自于Diffusers,Diffusers代码较为简单清晰,是一个非常好的仓库,学习起来也比较快。
二、DiT的组成
DiT由三大部分组成。
1、Sampler采样器。
2、Variational Autoencoder (VAE) 变分自编码器。
3、UNet 主网络,噪声预测器。
每一部分都很重要,由于DiT的官方版本并没有在 大规模文本图片 的 数据集上训练,只使用了imagenet进行预训练。所以它并没有文本输入,而是以标签作为输入。因此,DiT只能按照类别进行图片生成,可以生成imagenet中的1000类
三、生成流程
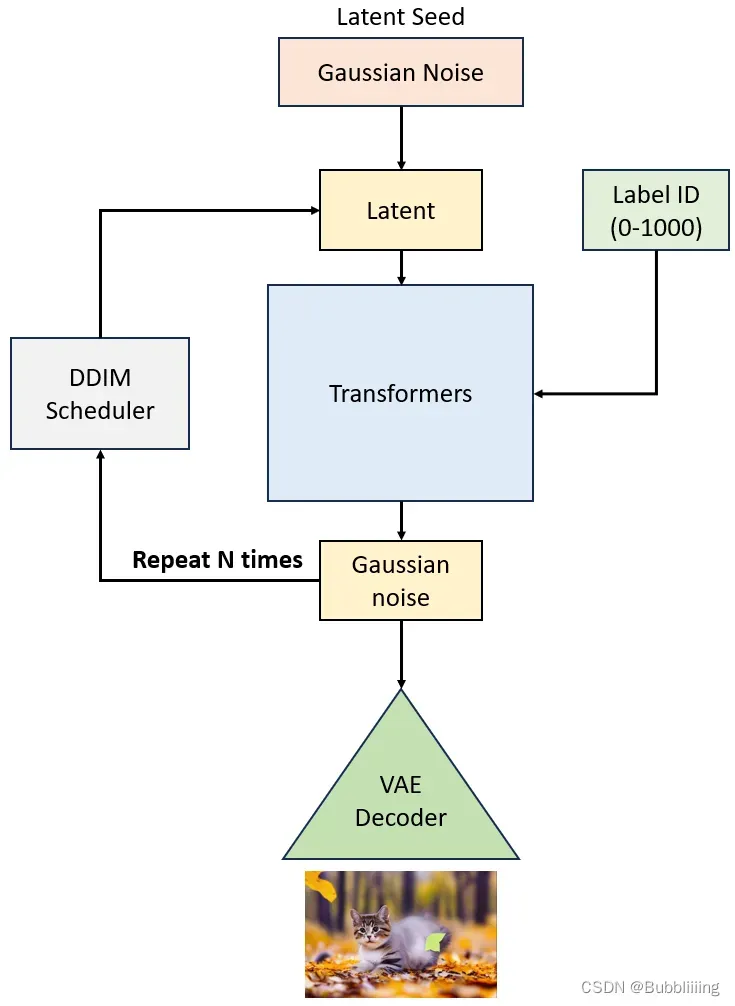
生成流程分为两个部分:
1、生成正态分布向量后进行若干次采样。
2、进行解码。
由于DiT只能按照类别进行图片生成,所以无需对文本进行编码,直接传入类别的对应的id(0-1000)即可指定类别。
# --------------------------------- #
# 前处理
# --------------------------------- #
# 生成latent
latents = randn_tensor(
shape=(batch_size, latent_channels, latent_size, latent_size),
generator=generator,
device=self._execution_device,
dtype=self.transformer.dtype,
)
latent_model_input = torch.cat([latents] * 2) if guidance_scale > 1 else latents
# 将输入的label 与 null label进行concat,null label是负向提示类。
class_labels = torch.tensor(class_labels, device=self._execution_device).reshape(-1)
class_null = torch.tensor([1000] * batch_size, device=self._execution_device)
class_labels_input = torch.cat([class_labels, class_null], 0) if guidance_scale > 1 else class_labels
# 设置生成的步数
self.scheduler.set_timesteps(num_inference_steps)
# --------------------------------- #
# 扩散生成
# --------------------------------- #
# 开始N步扩散的循环
for t in self.progress_bar(self.scheduler.timesteps):
if guidance_scale > 1:
half = latent_model_input[: len(latent_model_input) // 2]
latent_model_input = torch.cat([half, half], dim=0)
latent_model_input = self.scheduler.scale_model_input(latent_model_input, t)
# 处理timesteps
timesteps = t
if not torch.is_tensor(timesteps):
is_mps = latent_model_input.device.type == "mps"
if isinstance(timesteps, float):
dtype = torch.float32 if is_mps else torch.float64
else:
dtype = torch.int32 if is_mps else torch.int64
timesteps = torch.tensor([timesteps], dtype=dtype, device=latent_model_input.device)
elif len(timesteps.shape) == 0:
timesteps = timesteps[None].to(latent_model_input.device)
# broadcast to batch dimension in a way that's compatible with ONNX/Core ML
timesteps = timesteps.expand(latent_model_input.shape[0])
# 将隐含层特征、时间步和种类输入传入到transformers中
noise_pred = self.transformer(
latent_model_input, timestep=timesteps, class_labels=class_labels_input
).sample
# perform guidance
if guidance_scale > 1:
# 在通道上做分割,取出生图部分的通道
eps, rest = noise_pred[:, :latent_channels], noise_pred[:, latent_channels:]
cond_eps, uncond_eps = torch.split(eps, len(eps) // 2, dim=0)
half_eps = uncond_eps + guidance_scale * (cond_eps - uncond_eps)
eps = torch.cat([half_eps, half_eps], dim=0)
noise_pred = torch.cat([eps, rest], dim=1)
# 对结果进行分割,取出生图部分的通道
if self.transformer.config.out_channels // 2 == latent_channels:
model_output, _ = torch.split(noise_pred, latent_channels, dim=1)
else:
model_output = noise_pred
# 通过采样器将这一步噪声施加到隐含层
latent_model_input = self.scheduler.step(model_output, t, latent_model_input).prev_sample
if guidance_scale > 1:
latents, _ = latent_model_input.chunk(2, dim=0)
else:
latents = latent_model_input
# --------------------------------- #
# 后处理
# --------------------------------- #
# 通过vae进行解码
latents = 1 / self.vae.config.scaling_factor * latents
samples = self.vae.decode(latents).sample
samples = (samples / 2 + 0.5).clamp(0, 1)
# 转化为float32类别
samples = samples.cpu().permute(0, 2, 3, 1).float().numpy()
1、采样流程
a、生成初始噪声
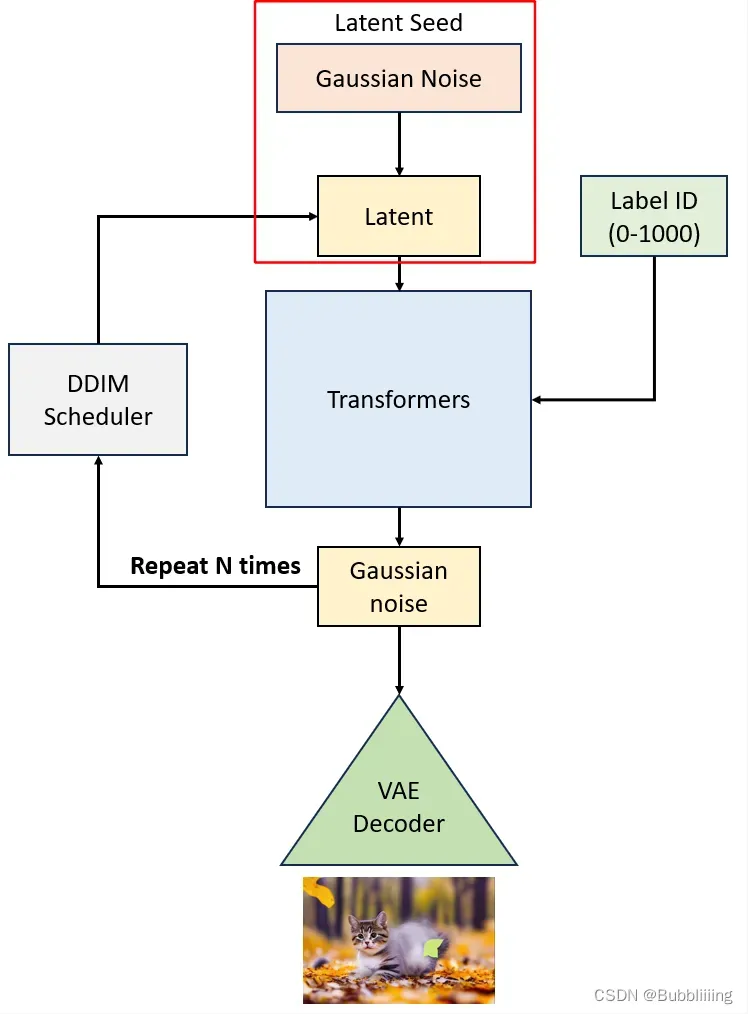
在生成初始噪声前介绍一下VAE,VAE是变分自编码器,可以将输入图片进行编码,一个高宽原本为256x256x3的图片在使用VAE编码后会变成32x32x4,这个4是人为设定的,不必纠结为什么不是3。这个时候我们就使用一个相对简单的矩阵代替原有的256x256x3的图片了,传输与存储成本就很低。在实际要去看的时候,可以对32x32x4的矩阵进行解码,获得256x256x3的图片。
因此,如果 我们要生成一个256x256x3的图片,那么我们只需要初始化一个32x32x4的隐向量,在隐空间进行扩散即可。在隐空间扩散好后,再使用解码器就可以生成256x256x3的图像。
在代码中,我们确实是这么做的,初始噪声的生成函数为randn_tensor,是diffusers自带的一个函数,尽管它写的很长,但实际生成初始噪声的代码只有一行:
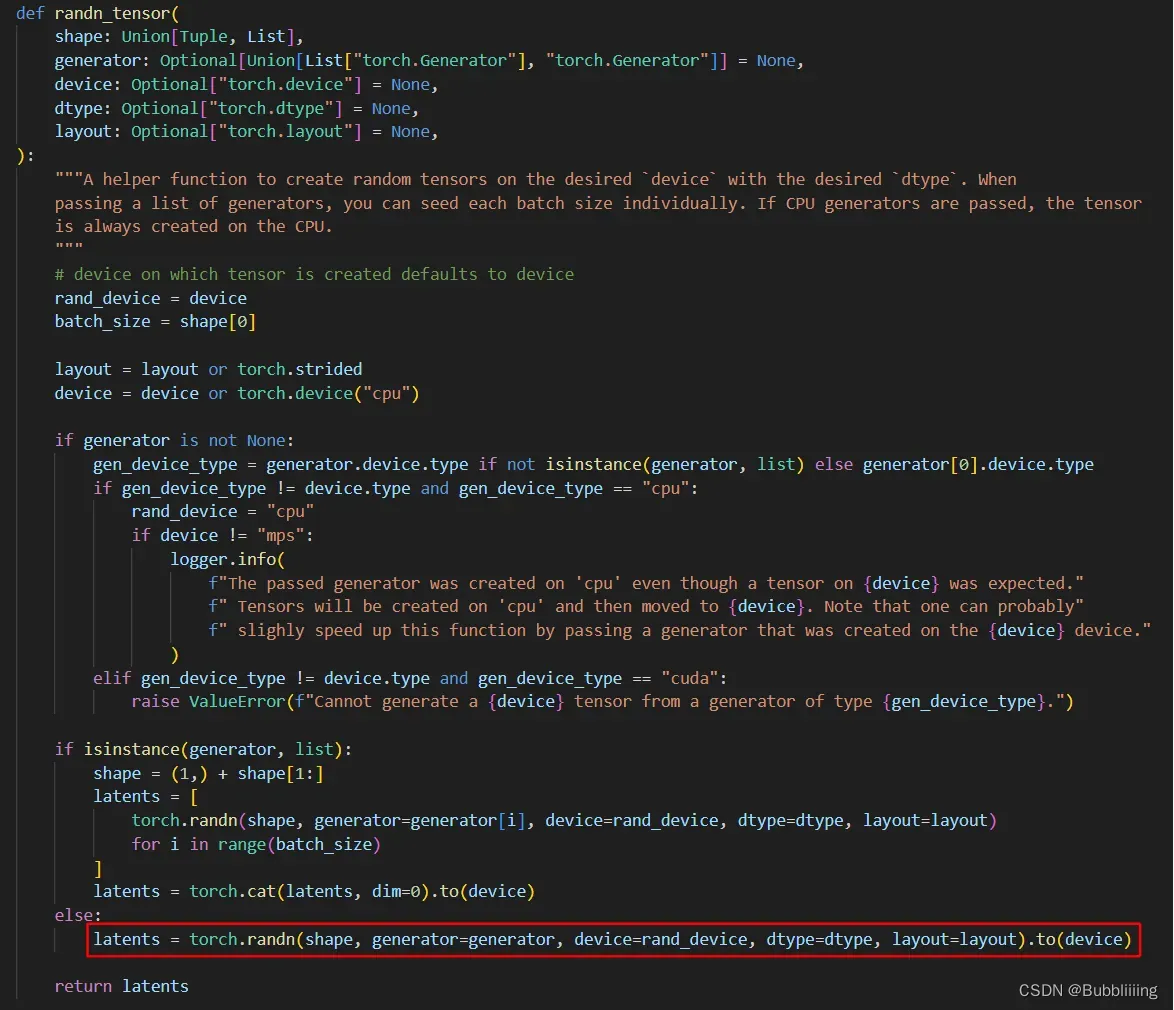
latents = torch.randn(shape, generator=generator, device=rand_device, dtype=dtype, layout=layout).to(device)
代码本来位于diffusers的工具文件中,为了方便查看,我将其复制到nets/pipeline.py中。
b、对噪声进行N次采样

既然Stable Diffusion是一个不断扩散的过程,那么少不了不断的去噪声,那么怎么去噪声便是一个问题。
在上一步中,我们已经获得了一个latents,它是一个符合正态分布的向量,我们便从它开始去噪声。
在代码中,我们有一个对时间步的循环,会不断的将隐含层向量输入到transformers中进行噪声预测,并且一步一步的去噪。
# --------------------------------- #
# 扩散生成
# --------------------------------- #
# 开始N步扩散的循环
for t in self.progress_bar(self.scheduler.timesteps):
if guidance_scale > 1:
half = latent_model_input[: len(latent_model_input) // 2]
latent_model_input = torch.cat([half, half], dim=0)
latent_model_input = self.scheduler.scale_model_input(latent_model_input, t)
# 处理timesteps
timesteps = t
if not torch.is_tensor(timesteps):
is_mps = latent_model_input.device.type == "mps"
if isinstance(timesteps, float):
dtype = torch.float32 if is_mps else torch.float64
else:
dtype = torch.int32 if is_mps else torch.int64
timesteps = torch.tensor([timesteps], dtype=dtype, device=latent_model_input.device)
elif len(timesteps.shape) == 0:
timesteps = timesteps[None].to(latent_model_input.device)
# broadcast to batch dimension in a way that's compatible with ONNX/Core ML
timesteps = timesteps.expand(latent_model_input.shape[0])
# 将隐含层特征、时间步和种类输入传入到transformers中
noise_pred = self.transformer(
latent_model_input, timestep=timesteps, class_labels=class_labels_input
).sample
# perform guidance
if guidance_scale > 1:
# 在通道上做分割,取出生图部分的通道
eps, rest = noise_pred[:, :latent_channels], noise_pred[:, latent_channels:]
cond_eps, uncond_eps = torch.split(eps, len(eps) // 2, dim=0)
half_eps = uncond_eps + guidance_scale * (cond_eps - uncond_eps)
eps = torch.cat([half_eps, half_eps], dim=0)
noise_pred = torch.cat([eps, rest], dim=1)
# 对结果进行分割,取出生图部分的通道
if self.transformer.config.out_channels // 2 == latent_channels:
model_output, _ = torch.split(noise_pred, latent_channels, dim=1)
else:
model_output = noise_pred
# 通过采样器将这一步噪声施加到隐含层
latent_model_input = self.scheduler.step(model_output, t, latent_model_input).prev_sample
c、单次采样解析
I、预测噪声
在进行单次采样前,需要首先判断是否有负向提示类,如果有,我们需要同时处理负向提示类,否则仅仅需要处理正向提示类。实际使用的时候一般都有负向提示类(效果会好一些),所以默认进入对应的处理过程。
在处理负向提示类时,我们对输入进来的隐向量进行复制,一个属于正向提示类(0-999),一个属于负向提示类(1000)。它们是在batch_size维度进行堆叠,二者不会互相影响。然后我们将正向提示类和负向提示类(1000)也在batch_size维度堆叠。代码中,如果guidance_scale>1则代表需要负向提示类。
# --------------------------------- #
# 前处理
# --------------------------------- #
# 生成latent
latents = randn_tensor(
shape=(batch_size, latent_channels, latent_size, latent_size),
generator=generator,
device=self._execution_device,
dtype=self.transformer.dtype,
)
latent_model_input = torch.cat([latents] * 2) if guidance_scale > 1 else latents
# 将输入的label 与 null label进行concat,null label是负向提示类。
class_labels = torch.tensor(class_labels, device=self._execution_device).reshape(-1)
class_null = torch.tensor([1000] * batch_size, device=self._execution_device)
class_labels_input = torch.cat([class_labels, class_null], 0) if guidance_scale > 1 else class_labels
堆叠完后,我们将隐向量、步数和类别条件一起传入网络中,将结果在bs维度进行使用chunk进行分割。
因为我们在堆叠时,正向提示类放在了前面。因此分割好后,前半部分cond_eps属于利用正向提示类得到的,后半部分uncond_eps属于利用负向提示类得到的,我们本质上应该扩大正向提示类的影响,远离负向提示类的影响。因此,我们使用cond_eps-uncond_eps计算二者的距离,使用scale扩大二者的距离。在uncond_eps基础上,得到最后的隐向量。
# 堆叠完后,隐向量、步数和prompt条件一起传入网络中,将结果在bs维度进行使用chunk进行分割
e_t_uncond, e_t = self.model.apply_model(x_in, t_in, c_in).chunk(2)
e_t = e_t_uncond + unconditional_guidance_scale * (e_t - e_t_uncond)
此时获得的eps就是通过隐向量和提示类共同获得的预测噪声啦。
II、施加噪声
在获得噪声后,我们还要将获得的新噪声,按照一定的比例添加到原来的原始噪声上。
diffusers的代码并没有将施加噪声的代码写在明面上,而是使用采样器的step方法替代,采样流程与DDIM一致,因此直接参考DDIM公式即可,此前,在Stable Diffusion相关博文中写到过DDIM公式,可以参考对应博文了解一下。
latent_model_input = self.scheduler.step(model_output, t, latent_model_input).prev_sample
d、预测噪声过程中的网络结构解析
这个部分是DiT与Stable Diffusion最大的不同,DiT将网络结构从Unet转换成了Transformers,
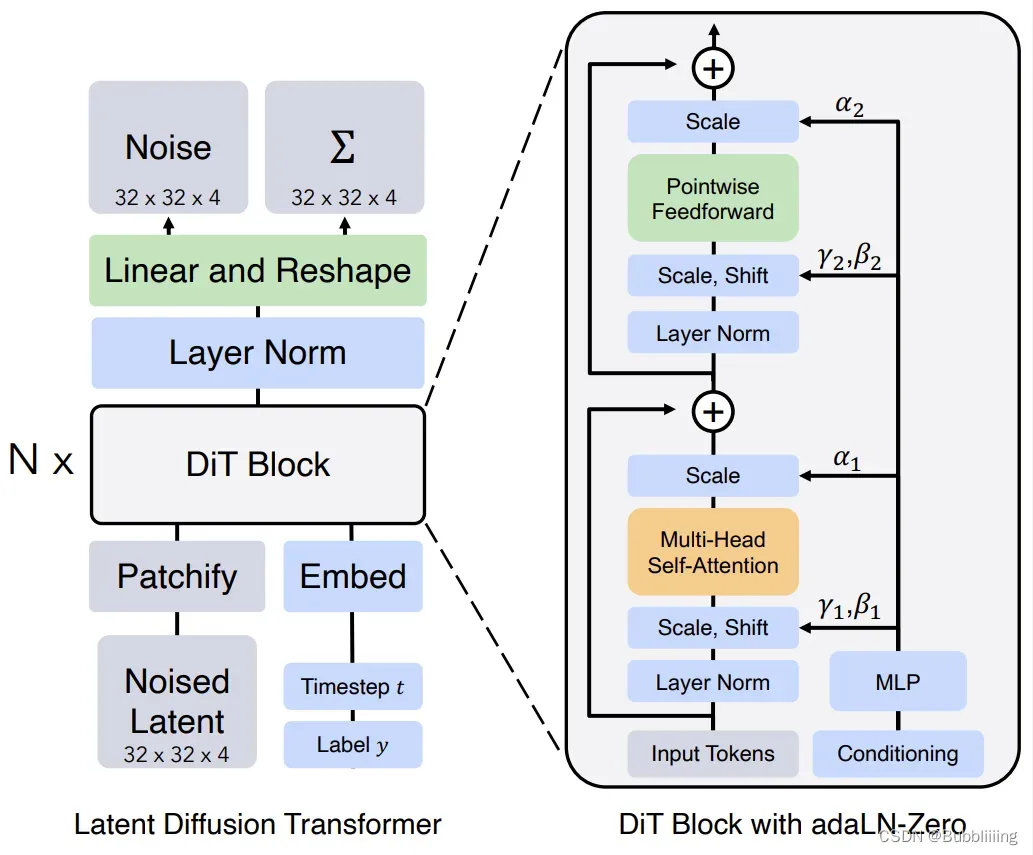
i、adaLN-Zero结构解析
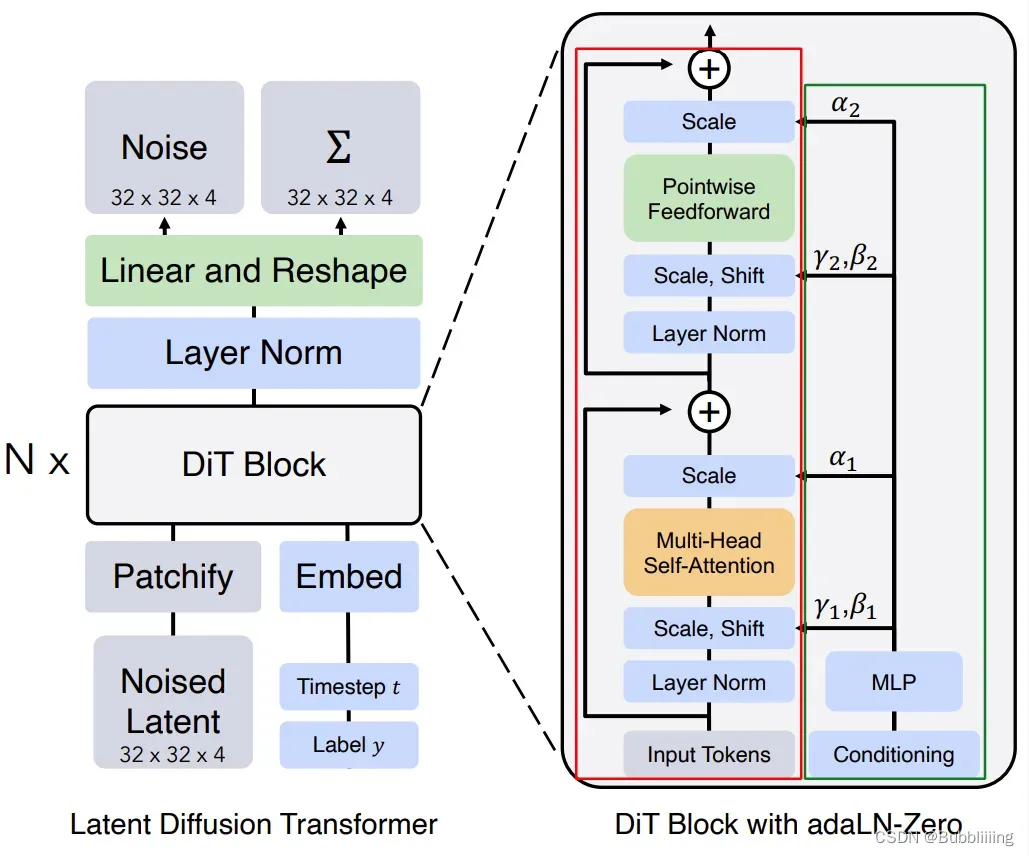
Transformers主要做的工作是结合 时间步t 和 类别 计算这一时刻的噪声。此处的Transformers结构与VIT中的Transformers基本一致,但为了融合时间步t和类别,新增了一个Embed层和adaLN-Zero结构。
- Embed层主要是将输入进来的timestep和label进行向量化。
- adaLN-Zero则是通过全连接对向量化后的timestep和label进行映射,然后分为6个部分,分别作用于DiT的不同阶段用于缩放(scale)、偏置(shift、bias)与门函数(gate)。
如下是Embed层和adaLN-Zero结构的代码与示意图:
class CombinedTimestepLabelEmbeddings(nn.Module):
def __init__(self, num_classes, embedding_dim, class_dropout_prob=0.1):
super().__init__()
self.time_proj = Timesteps(num_channels=256, flip_sin_to_cos=True, downscale_freq_shift=1)
self.timestep_embedder = TimestepEmbedding(in_channels=256, time_embed_dim=embedding_dim)
self.class_embedder = LabelEmbedding(num_classes, embedding_dim, class_dropout_prob)
def forward(self, timestep, class_labels, hidden_dtype=None):
timesteps_proj = self.time_proj(timestep)
timesteps_emb = self.timestep_embedder(timesteps_proj.to(dtype=hidden_dtype)) # (N, D)
class_labels = self.class_embedder(class_labels) # (N, D)
conditioning = timesteps_emb + class_labels # (N, D)
return conditioning
class AdaLayerNormZero(nn.Module):
"""
Norm layer adaptive layer norm zero (adaLN-Zero).
"""
def __init__(self, embedding_dim, num_embeddings):
super().__init__()
self.emb = CombinedTimestepLabelEmbeddings(num_embeddings, embedding_dim)
self.silu = nn.SiLU()
self.linear = nn.Linear(embedding_dim, 6 * embedding_dim, bias=True)
self.norm = nn.LayerNorm(embedding_dim, elementwise_affine=False, eps=1e-6)
def forward(self, x, timestep, class_labels, hidden_dtype=None):
emb = self.linear(self.silu(self.emb(timestep, class_labels, hidden_dtype=hidden_dtype)))
shift_msa, scale_msa, gate_msa, shift_mlp, scale_mlp, gate_mlp = emb.chunk(6, dim=1)
x = self.norm(x) * (1 + scale_msa[:, None]) + shift_msa[:, None]
return x, gate_msa, shift_mlp, scale_mlp, gate_mlp
ii、patch分块处理
在代码中,我们使用一个PatchEmbed类对输入的隐含层向量进行分块,该操作便是VIT中的patchc操作,通过卷积进行类似于下采样的操作,可以减少计算量。
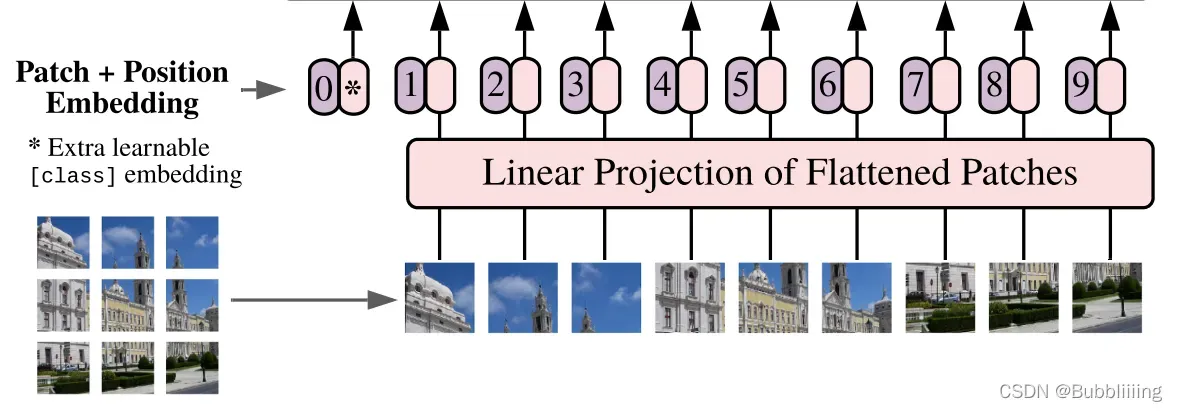
如下为patch分块处理的代码,核心是使用步长和卷积核大小一样的Conv2d模块进行处理,由于步长和卷积核大小一致,每个图片区域的特征提取过程就不会有重叠。
我们初始化生成的隐含层向量为32x32x4。在DiT-XL-2中,patch处理的步长和卷积核大小为2,通道为1152,在处理完成后,特征的通道上升,高宽被压缩,此时我们获得一个16x16x1152的新特征,然后我们将其在长宽上进行平铺,获得一个256×1152的向量,并且加上位置信息。
class PatchEmbed(nn.Module):
"""2D Image to Patch Embedding"""
def __init__(
self,
height=224,
width=224,
patch_size=16,
in_channels=3,
embed_dim=768,
layer_norm=False,
flatten=True,
bias=True,
):
super().__init__()
num_patches = (height // patch_size) * (width // patch_size)
self.flatten = flatten
self.layer_norm = layer_norm
self.proj = nn.Conv2d(
in_channels, embed_dim, kernel_size=(patch_size, patch_size), stride=patch_size, bias=bias
)
if layer_norm:
self.norm = nn.LayerNorm(embed_dim, elementwise_affine=False, eps=1e-6)
else:
self.norm = None
pos_embed = get_2d_sincos_pos_embed(embed_dim, int(num_patches**0.5))
self.register_buffer("pos_embed", torch.from_numpy(pos_embed).float().unsqueeze(0), persistent=False)
def forward(self, latent):
latent = self.proj(latent)
if self.flatten:
latent = latent.flatten(2).transpose(1, 2) # BCHW -> BNC
if self.layer_norm:
latent = self.norm(latent)
return latent + self.pos_embed
iii、Transformer特征提取
此后,我们将向量传入Transformer中进行特征提取,对应图中的DiT Block。
256×1152的特征会通过图中红框的部分,而时间步t 和 类别会通过途中绿框的部分。
红框部分的结构,除了缩放(scale)、偏置(shift、bias)与门函数(gate,对应图中的α,代码中是gate但图中写scale)外,其它部分与VIT一模一样,可参考博文VIT结构解析进行了解,主要工作的模块是Self-Attention和Pointwise Feedforward(MLP)。这两个模块的输入和输出均为256×1152的特征。
而缩放(scale)、偏置(shift、bias)与门函数(gate)分别对应了图中的γ、β和α。通过adaLN-Zero结构获得,γ、β分别在 Self-Attention和Pointwise Feedforward 的处理前 进行特征的 缩放与偏置 ,而Pointwise Feedforward则在 Self-Attention和Pointwise Feedforward 的处理后 进行特征的 缩放。在代码中我添加了中文注释,方便读者区分添加缩放、偏置和门函数的位置。
DiT Block的输入和输出特征均为256×1152。
class BasicTransformerBlock(nn.Module):
def __init__(
self,
dim: int,
num_attention_heads: int,
attention_head_dim: int,
dropout=0.0,
cross_attention_dim: Optional[int] = None,
activation_fn: str = "geglu",
num_embeds_ada_norm: Optional[int] = None,
attention_bias: bool = False,
only_cross_attention: bool = False,
double_self_attention: bool = False,
upcast_attention: bool = False,
norm_elementwise_affine: bool = True,
norm_type: str = "layer_norm",
final_dropout: bool = False,
):
super().__init__()
.......
def forward(
self,
hidden_states: torch.FloatTensor,
attention_mask: Optional[torch.FloatTensor] = None,
encoder_hidden_states: Optional[torch.FloatTensor] = None,
encoder_attention_mask: Optional[torch.FloatTensor] = None,
timestep: Optional[torch.LongTensor] = None,
cross_attention_kwargs: Dict[str, Any] = None,
class_labels: Optional[torch.LongTensor] = None,
):
# Notice that normalization is always applied before the real computation in the following blocks.
# 1. Self-Attention
if self.use_ada_layer_norm:
norm_hidden_states = self.norm1(hidden_states, timestep)
elif self.use_ada_layer_norm_zero:
# 在norm1中,已经进行了输入特征的缩放与偏置
norm_hidden_states, gate_msa, shift_mlp, scale_mlp, gate_mlp = self.norm1(
hidden_states, timestep, class_labels, hidden_dtype=hidden_states.dtype
)
else:
norm_hidden_states = self.norm1(hidden_states)
cross_attention_kwargs = cross_attention_kwargs if cross_attention_kwargs is not None else {}
attn_output = self.attn1(
norm_hidden_states,
encoder_hidden_states=encoder_hidden_states if self.only_cross_attention else None,
attention_mask=attention_mask,
**cross_attention_kwargs,
)
# 在self attention后,再次进行了特征的缩放(gate)
if self.use_ada_layer_norm_zero:
attn_output = gate_msa.unsqueeze(1) * attn_output
hidden_states = attn_output + hidden_states
# 2. Cross-Attention
if self.attn2 is not None:
norm_hidden_states = (
self.norm2(hidden_states, timestep) if self.use_ada_layer_norm else self.norm2(hidden_states)
)
attn_output = self.attn2(
norm_hidden_states,
encoder_hidden_states=encoder_hidden_states,
attention_mask=encoder_attention_mask,
**cross_attention_kwargs,
)
hidden_states = attn_output + hidden_states
# 3. Feed-forward
norm_hidden_states = self.norm3(hidden_states)
# 在mlp前,进行了输入特征的缩放与偏置
if self.use_ada_layer_norm_zero:
norm_hidden_states = norm_hidden_states * (1 + scale_mlp[:, None]) + shift_mlp[:, None]
if self._chunk_size is not None:
# "feed_forward_chunk_size" can be used to save memory
if norm_hidden_states.shape[self._chunk_dim] % self._chunk_size != 0:
raise ValueError(
f"`hidden_states` dimension to be chunked: {norm_hidden_states.shape[self._chunk_dim]} has to be divisible by chunk size: {self._chunk_size}. Make sure to set an appropriate `chunk_size` when calling `unet.enable_forward_chunking`."
)
num_chunks = norm_hidden_states.shape[self._chunk_dim] // self._chunk_size
ff_output = torch.cat(
[self.ff(hid_slice) for hid_slice in norm_hidden_states.chunk(num_chunks, dim=self._chunk_dim)],
dim=self._chunk_dim,
)
else:
ff_output = self.ff(norm_hidden_states)
# 在mlp后,再次进行了特征的缩放(gate)
if self.use_ada_layer_norm_zero:
ff_output = gate_mlp.unsqueeze(1) * ff_output
hidden_states = ff_output + hidden_states
return hidden_states
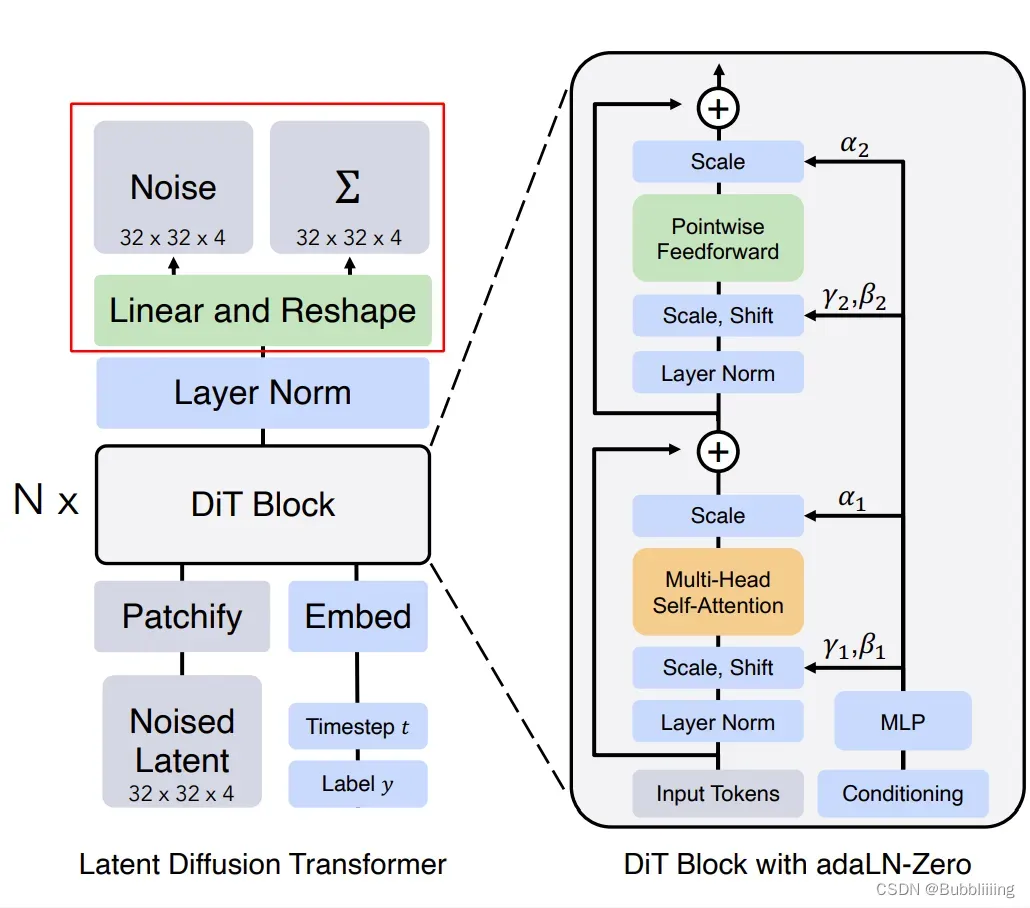
iv、上采样
虽然这个部分学名可能不叫上采样,但是我觉得用上采样来描述它还是比较合适的,因为我们前面做过patch分块处理,所以隐含层的高宽被压缩,而这一步,则是将隐含层的高宽再还原回去。
在这里我们会对256×1152进行两次全连接+一次LayerNorm,两次全连接的神经元个数分别为2304和patch_size * patch_size * out_channels。第一次全连接目的是扩宽通道数,第二次全链接则是还原高宽。两次全连接后,在DiT-XL-2中,out_channels为8(8可拆分为4 + 4,前面的4用于直接预测噪声,后面的4用于根据均值和方差计算KL散度),特征层的shape从256×1152变为256×32。
然后我们会进行一系列shape变换,首先将256×1152变为16x16x2x2x8,然后进行转置变为8x16x2x16x2,然后还原高宽变为8x32x32。此时上采样结束。该部分对应了图中的Linear And Reshape。
上采样代码如下所示:
# 3. Output
conditioning = self.transformer_blocks[0].norm1.emb(
timestep, class_labels, hidden_dtype=hidden_states.dtype
)
shift, scale = self.proj_out_1(F.silu(conditioning)).chunk(2, dim=1)
hidden_states = self.norm_out(hidden_states) * (1 + scale[:, None]) + shift[:, None]
hidden_states = self.proj_out_2(hidden_states)
# unpatchify
height = width = int(hidden_states.shape[1] ** 0.5)
hidden_states = hidden_states.reshape(
shape=(-1, height, width, self.patch_size, self.patch_size, self.out_channels)
)
hidden_states = torch.einsum("nhwpqc->nchpwq", hidden_states)
output = hidden_states.reshape(
shape=(-1, self.out_channels, height * self.patch_size, width * self.patch_size)
)
3、隐空间解码生成图片
通过上述步骤,已经可以多次采样获得结果,然后我们便可以通过隐空间解码生成图片。
隐空间解码生成图片的过程非常简单,将上文多次采样后的结果,使用vae的decode方法即可生成图片。
# --------------------------------- #
# 后处理
# --------------------------------- #
# 通过vae进行解码
latents = 1 / self.vae.config.scaling_factor * latents
samples = self.vae.decode(latents).sample
samples = (samples / 2 + 0.5).clamp(0, 1)
# 转化为float32类别
samples = samples.cpu().permute(0, 2, 3, 1).float().numpy()
类别到图像预测过程代码
整体预测代码如下:
import torch
import json
import os
from diffusers import DPMSolverMultistepScheduler, AutoencoderKL
from nets.transformer_2d import Transformer2DModel
from nets.pipeline import DiTPipeline
# 模型路径
model_path = "model_data/DiT-XL-2-256"
# 初始化DiT的各个组件
scheduler = DPMSolverMultistepScheduler.from_pretrained(model_path, subfolder="scheduler")
transformer = Transformer2DModel.from_pretrained(model_path, subfolder="transformer")
vae = AutoencoderKL.from_pretrained(model_path, subfolder="vae")
id2label = json.load(open(os.path.join(model_path, "model_index.json"), "r"))['id2label']
# 初始化DiT的Pipeline
pipe = DiTPipeline(scheduler=scheduler, transformer=transformer, vae=vae, id2label=id2label)
pipe = pipe.to("cuda")
# imagenet种类 对应的 名称
words = ["white shark", "umbrella"]
# 获得imagenet对应的ids
class_ids = pipe.get_label_ids(words)
# 设置seed
generator = torch.manual_seed(42)
# pipeline前传
output = pipe(class_labels=class_ids, num_inference_steps=25, generator=generator)
# 保存图片
for index, image in enumerate(output.images):
image.save(f"output-{index}.png")
版权声明:本文为博主作者:Bubbliiiing原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/weixin_44791964/article/details/136276539