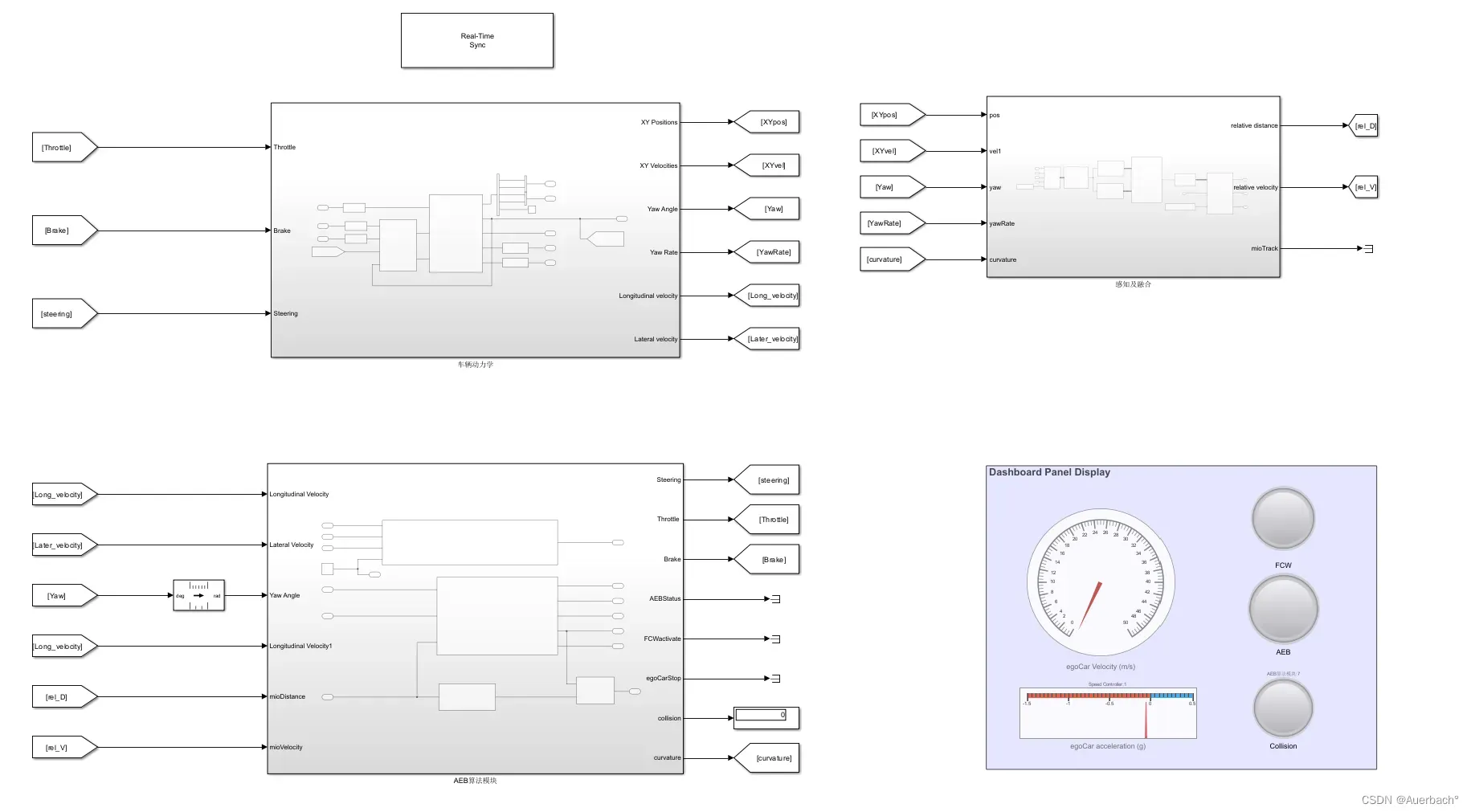
本节采用matlab自动驾驶工具箱开发AEB算法,首先建立仿真场景并添加传感器,在传感器融合得到障碍物信息之后,搭建AEB算法模块进行仿真测试;
测试效果图:

1. 场景搭建及传感器信息处理
AEB(Autonomous Emergency Braking)算法是一种用于自动驾驶和车辆安全系统的算法,旨在帮助减少碰撞风险并减轻碰撞的严重程度。AEB系统通过使用传感器和算法来监测车辆前方的障碍物,并在检测到潜在碰撞的情况下自动触发制动系统,以减少车辆的速度或完全停车,从而避免或减轻碰撞的后果。算法整体框图如下:
1.1 场景搭建与导出
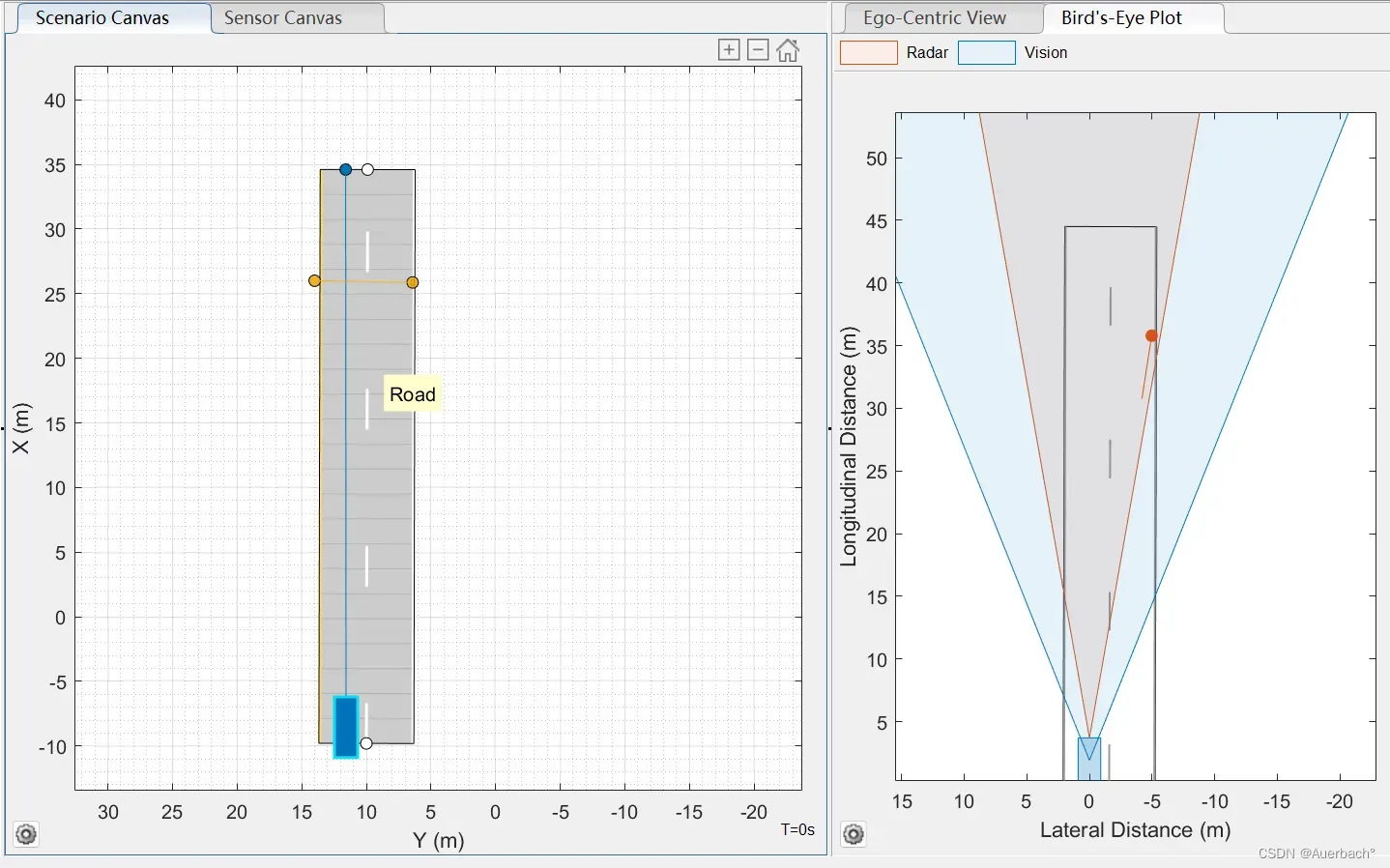
打开matlab→APP→driving scenario design,创建一个新场景:

在创建的场景中,可以查看鸟瞰图,我们创建一个主车触发AEB减速避让行人的场景,其中,行人的速度为1.5m/s,主车的行驶速度为10m/s;在设置仿真场景后,在主车上配置传感器,此处选择装一个毫米波雷达和一个相机,右图橙色点即为毫米波雷达扫描到的障碍物信息:
在搭建场景结束后,点击右上角的explore将本场景导出为.m脚本:
% function [allData, scenario, sensors] = AEBscenario()
%创建场景
[scenario, egoVehicle] = createDrivingScenario;
%创建传感器
[sensors, numSensors] = createSensors(scenario);
allData = struct('Time', {}, 'ActorPoses', {}, 'ObjectDetections', {}, 'LaneDetections', {}, 'PointClouds', {}, 'INSMeasurements', {});
running = true;
while running
% 生成车辆
poses = targetPoses(egoVehicle);
time = scenario.SimulationTime;
objectDetections = {};
laneDetections = [];
ptClouds = {};
insMeas = {};
isValidTime = false(1, numSensors);
% Generate detections for each sensor
for sensorIndex = 1:numSensors
sensor = sensors{sensorIndex};
[objectDets, isValidTime(sensorIndex)] = sensor(poses, time);
numObjects = length(objectDets);
objectDetections = [objectDetections; objectDets(1:numObjects)]; %#ok<AGROW>
end
% Aggregate all detections into a structure for later use
if any(isValidTime)
allData(end + 1) = struct( ...
'Time', scenario.SimulationTime, ...
'ActorPoses', actorPoses(scenario), ...
'ObjectDetections', {objectDetections}, ...
'LaneDetections', {laneDetections}, ...
'PointClouds', {ptClouds}, ... %#ok<AGROW>
'INSMeasurements', {insMeas}); %#ok<AGROW>
end
% Advance the scenario one time step and exit the loop if the scenario is complete
running = advance(scenario);
end
% Restart the driving scenario to return the actors to their initial positions.
restart(scenario);
% Release all the sensor objects so they can be used again.
for sensorIndex = 1:numSensors
release(sensors{sensorIndex});
end
%%%%%%%%%%%%%%%%%%%%
% Helper functions %
%%%%%%%%%%%%%%%%%%%%
% Units used in createSensors and createDrivingScenario
% Distance/Position - meters
% Speed - meters/second
% Angles - degrees
% RCS Pattern - dBsm
function [sensors, numSensors] = createSensors(scenario)
% createSensors Returns all sensor objects to generate detections
% 设置传感器
profiles = actorProfiles(scenario);
sensors{1} = drivingRadarDataGenerator('SensorIndex', 1, ...
'MountingLocation', [3.7 0 0.2], ...
'RangeLimits', [0 120], ...
'TargetReportFormat', 'Detections', ...
'RangeRateLimits', [-120 120], ...
'ReferenceRange', 120, ...
'Profiles', profiles);
sensors{2} = visionDetectionGenerator('SensorIndex', 2, ...
'SensorLocation', [1.9 0], ...
'DetectorOutput', 'Objects only', ...
'ActorProfiles', profiles);
numSensors = 2;
end
function [scenario, egoVehicle] = createDrivingScenario
% createDrivingScenario Returns the drivingScenario defined in the Designer
% Construct a drivingScenario object.
scenario = drivingScenario;
% Add all road segments
roadCenters = [-9.8 10 0;
34.6 9.9 0];
laneSpecification = lanespec(2);
road(scenario, roadCenters, 'Lanes', laneSpecification, 'Name', 'Road');
% Add the ego vehicle
egoVehicle = vehicle(scenario, ...
'ClassID', 1, ...
'Position', [-9.88904986904784 11.5712861699397 0], ...
'Mesh', driving.scenario.carMesh, ...
'Name', 'Car');
waypoints = [-9.88904986904784 11.5712861699397 0;
34.6 12.1 0];
speed = [10;10];
trajectory(egoVehicle, waypoints, speed);
% Add the non-ego actors
pedestrian = actor(scenario, ...
'ClassID', 4, ...
'Length', 0.24, ...
'Width', 0.45, ...
'Height', 1.7, ...
'Position', [25.8676788564176 6.41940907360563 0], ...
'RCSPattern', [-8 -8;-8 -8], ...
'Mesh', driving.scenario.pedestrianMesh, ...
'PlotColor', [0.929 0.694 0.125], ...
'Name', 'Pedestrian');
waypoints = [25.8676788564176 6.41940907360563 0;
26 14 0];
speed = [1.5;1.5];
trajectory(pedestrian, waypoints, speed);
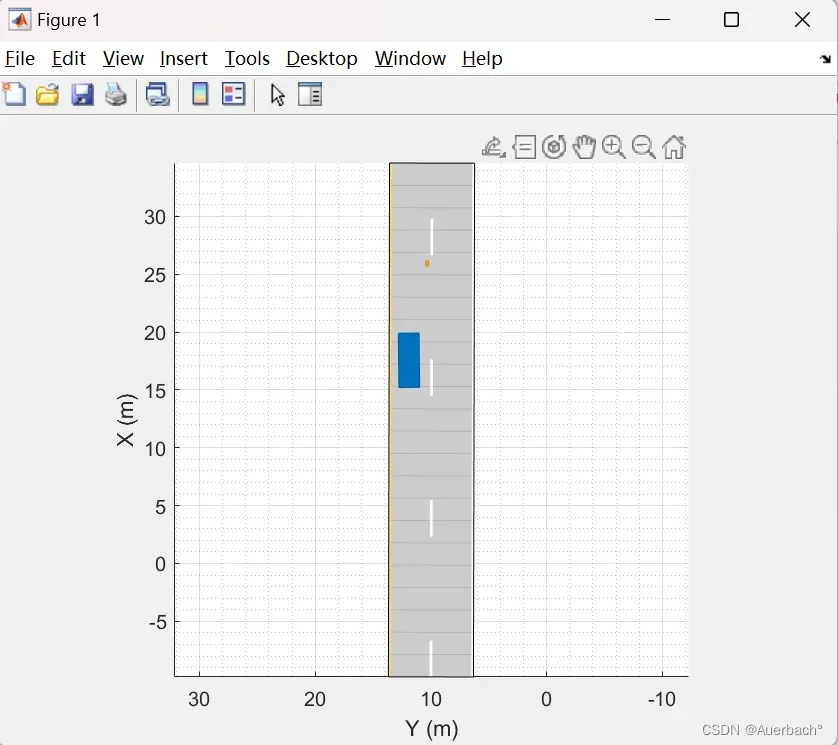
plot(scenario);
end
在最后一行的plot(scenario)可直接画出本场景,因此,我们可以通过写m脚本的方式,无需打开driving design scenario也可绘图,运行结果如下:
1.2 场景中传感器数据导入到simulink中
将场景导入到simulink中,采用自动驾驶工具箱提供的simulink接口模块:
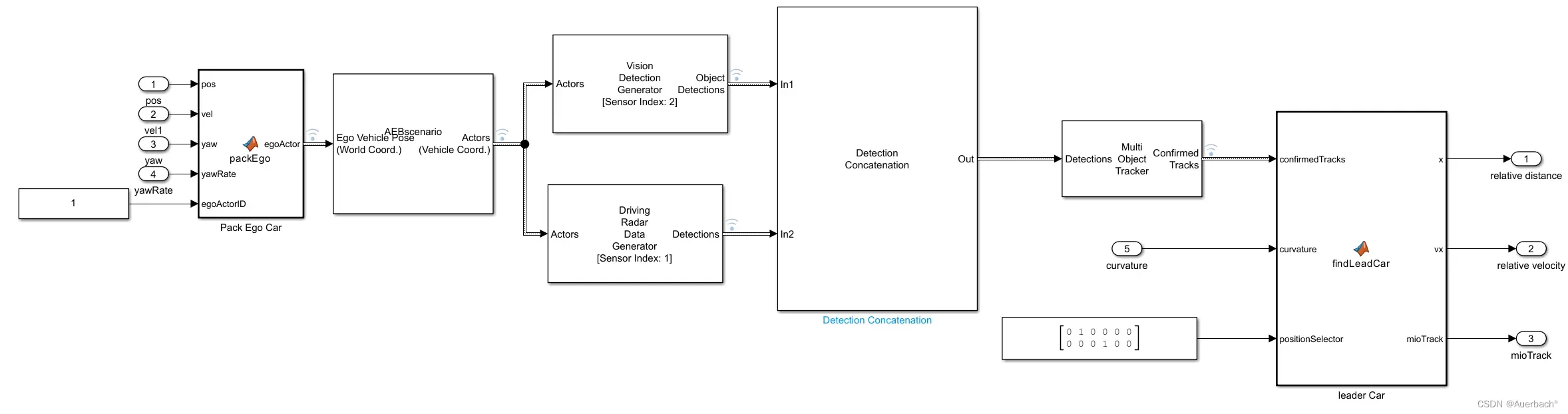
在scenario reader模块中加载预先设定好的场景,对于场景中驾驶员的输入,由于我们采用的egocar的动力学为simulink中的模块,故需要对输入的egocar接口进行配置:
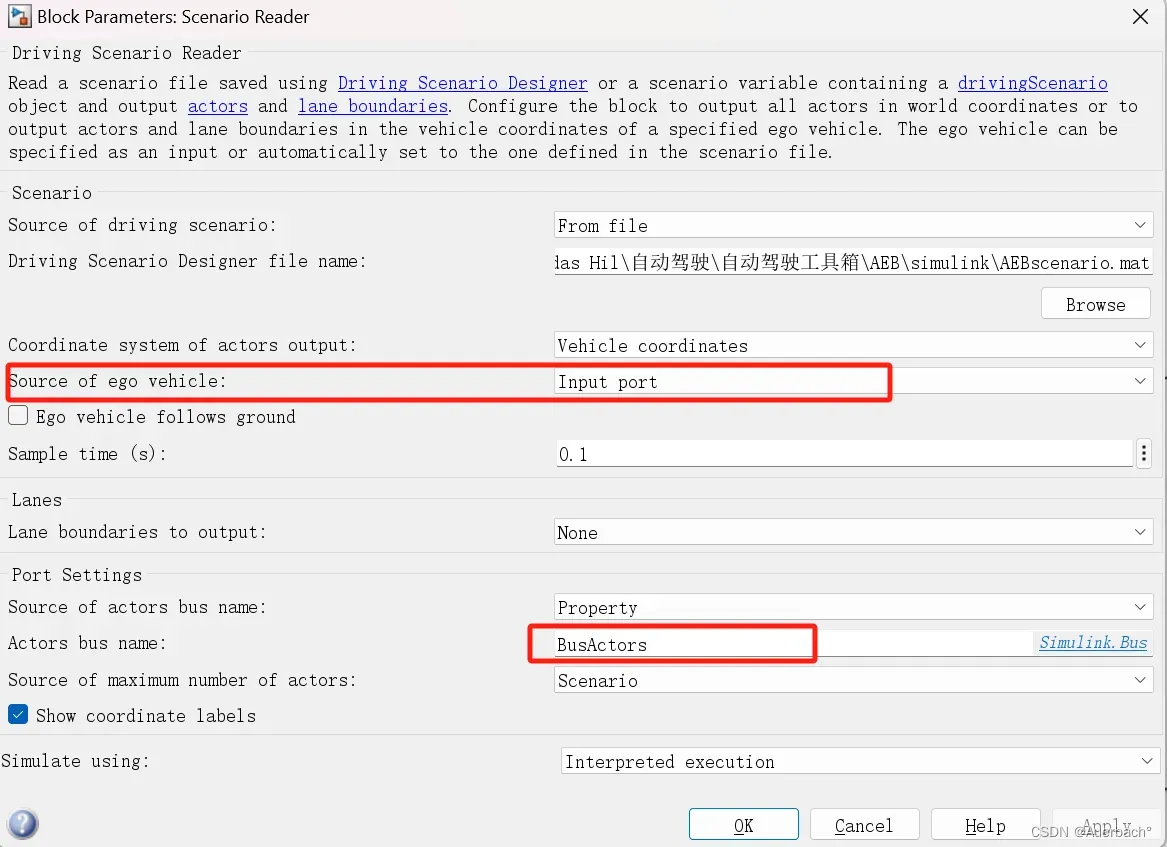
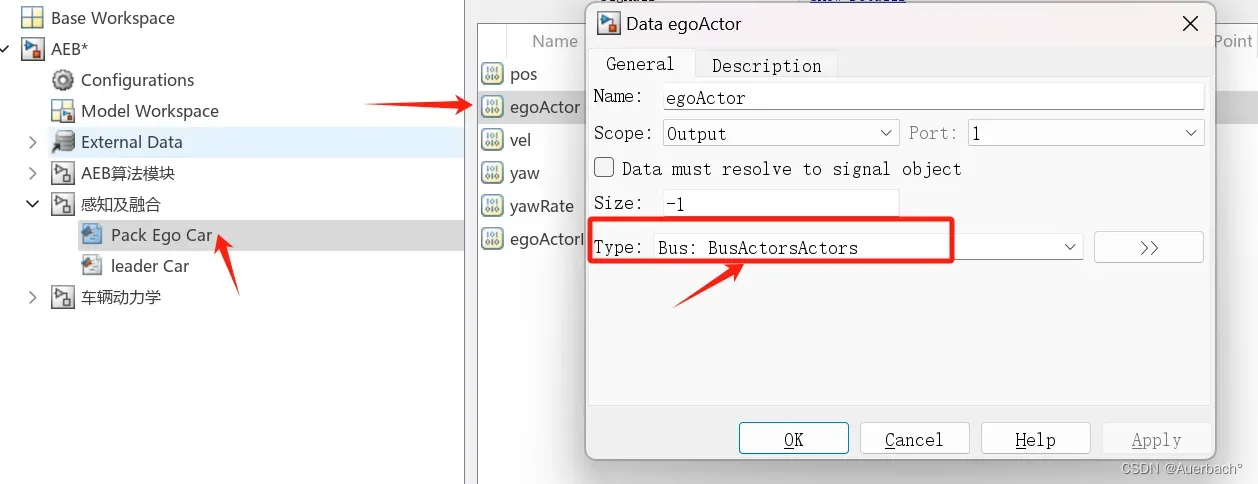
数据类型的BusActors,这个Bus类型数据我们在最后一节创建,ego pack函数如下:
function egoActor = packEgo(pos,vel,yaw,yawRate,egoActorID)
egoActor = struct(...
'ActorID',egoActorID,...
'Position', [pos(1) pos(2) 0], ...
'Velocity', [vel(1) vel(2) 0], ...
'Roll', 0, ...
'Pitch', 0, ...
'Yaw', yaw, ...
'AngularVelocity', [0 0 yawRate]);需要注意的是,egocar这个结构体是我们自己创建的,需要在explore中手动绑定数据类型:
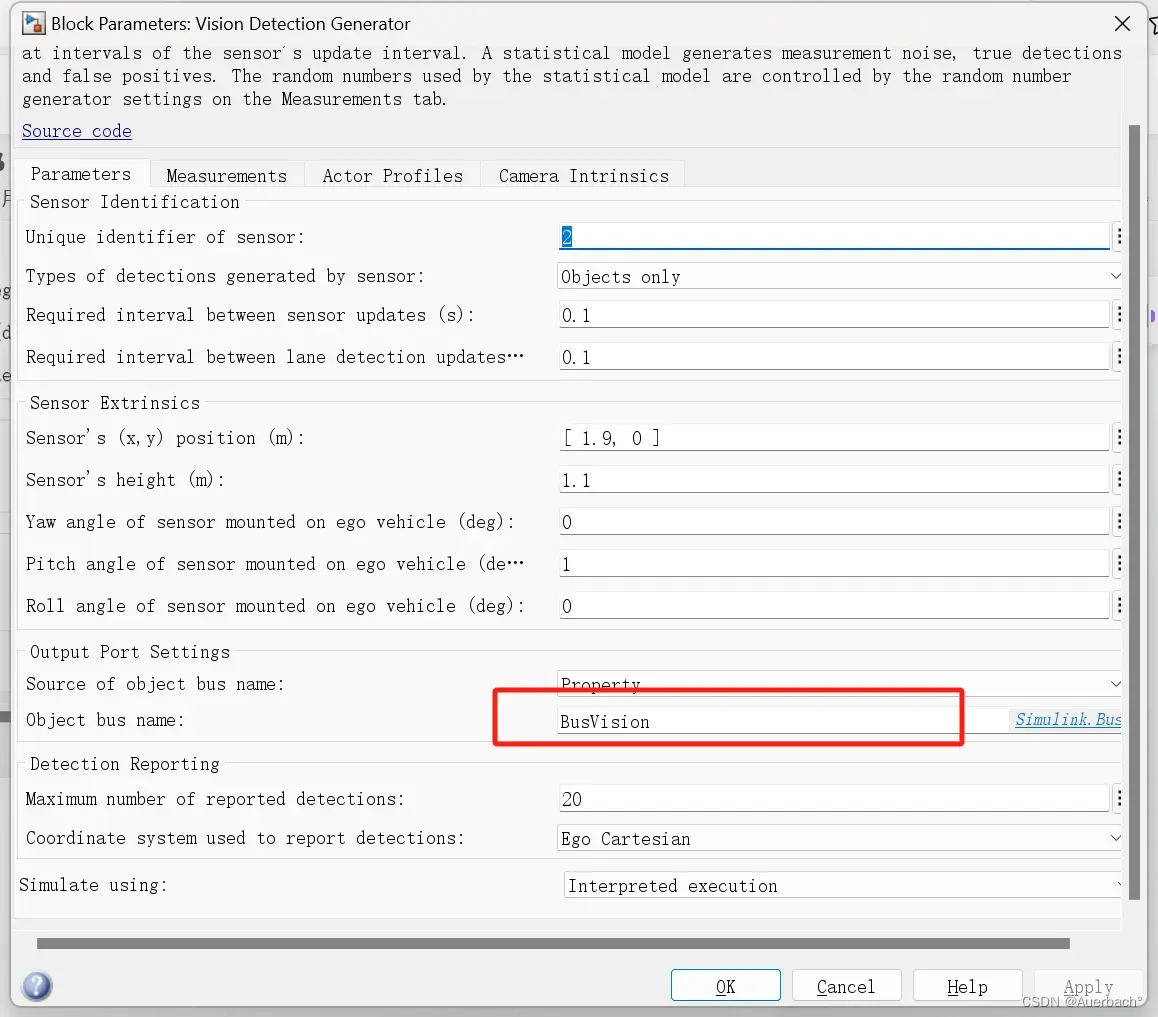
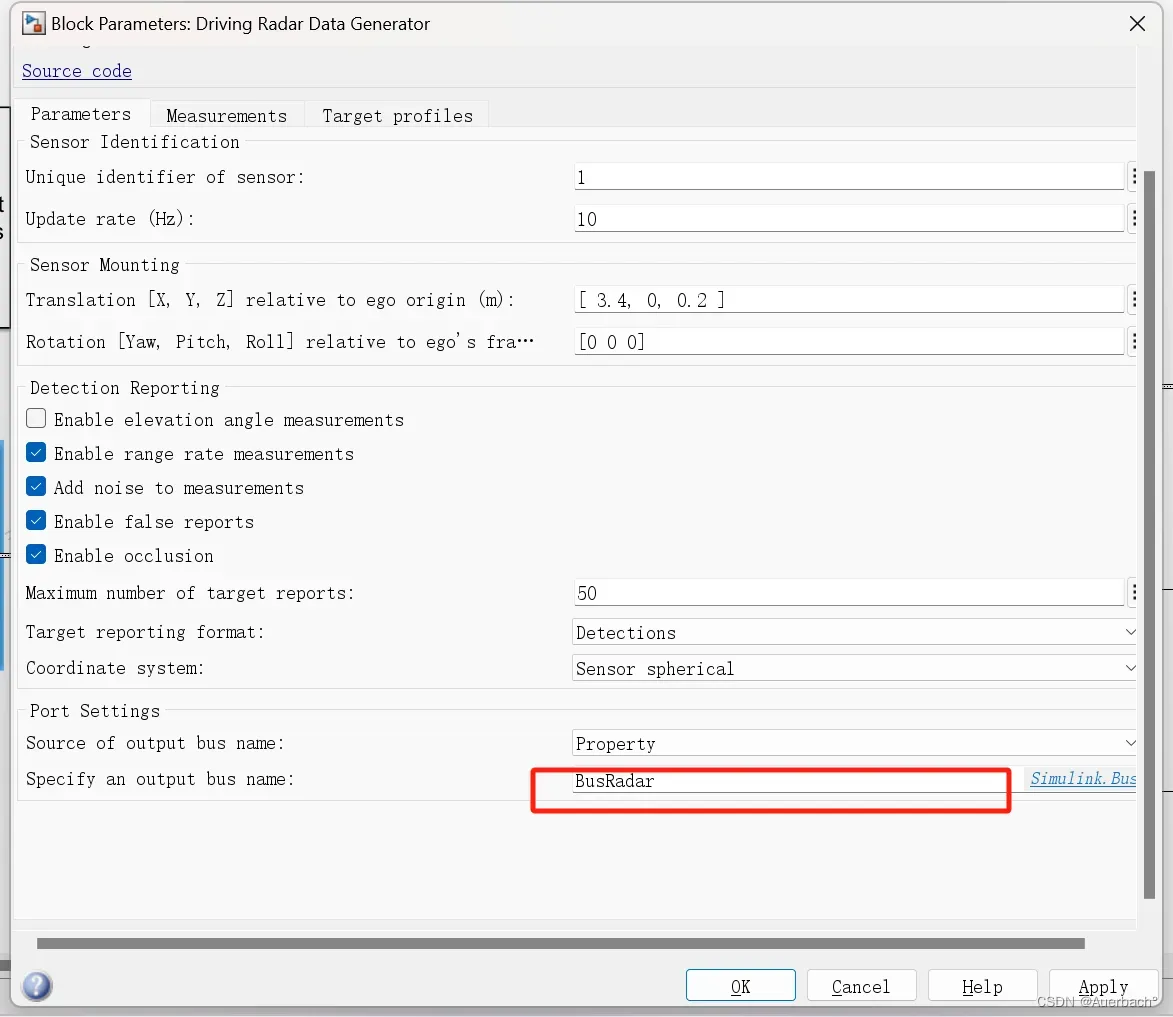
关于所有BUS数据类型的创建,都放在最后一节进行,下图为毫米波雷达和相机的输入接口模块:
Detection Concatenation采用默认设置,无需修改,对传感器融合模块的配置如下:
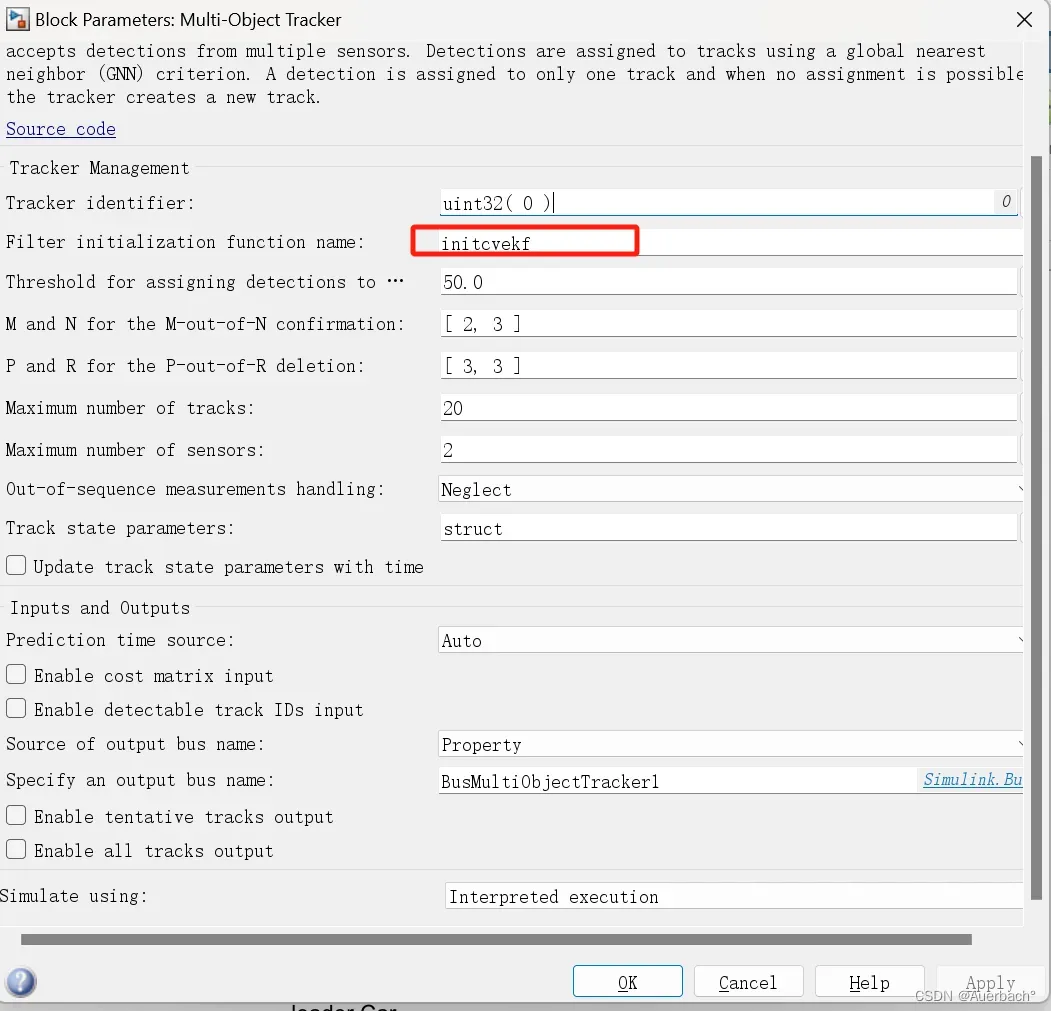
其中initcvekf为初始化函数,它用于初始化线性卡尔曼滤波观测器,此模块用于对毫米波雷达和相机的数据作融合处理,在融合之,需要将障碍物的信息与主车信息进行数学运算,以确认障碍物与主车之间的相对距离和相对速度:
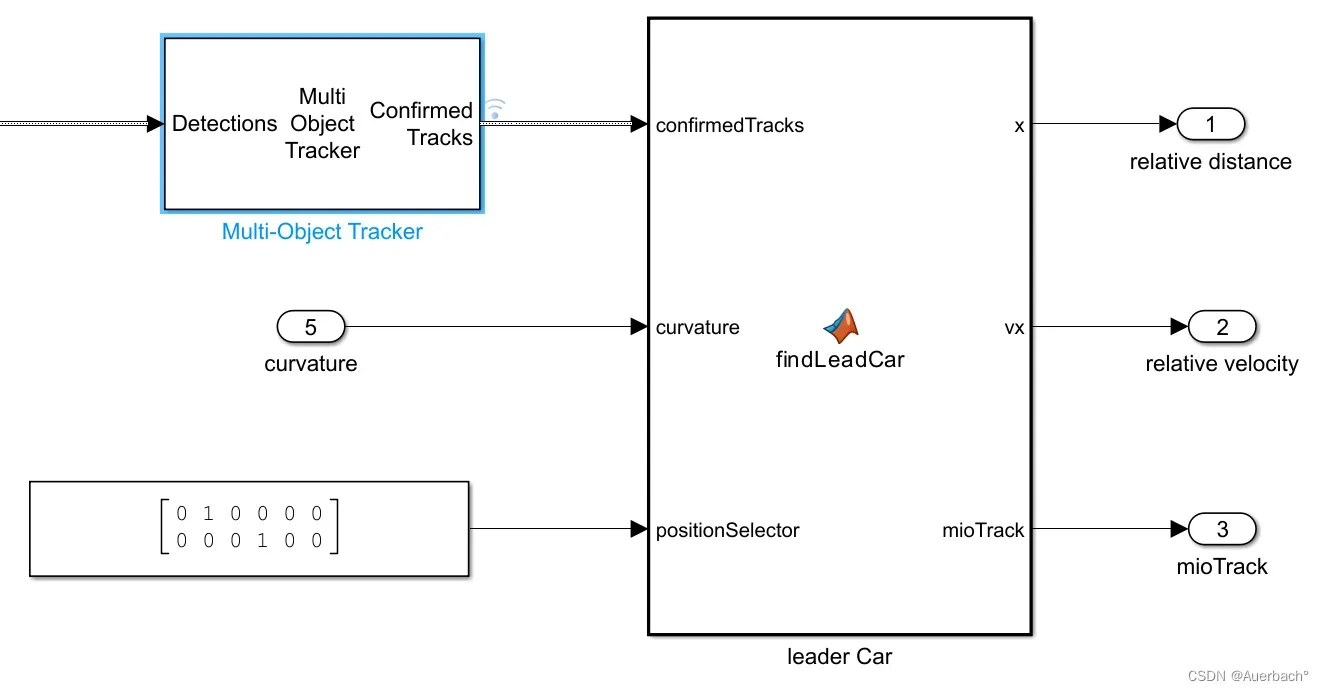
function [x,vx,mioTrack] = findLeadCar(confirmedTracks, curvature, positionSelector)
numStates = 6;
% 2. The lane is defined using a parabolic model, where y=ax^2+bx+c. a is
% equal to half the road curvature, b=0, and c is the offset of the lane
% boundaries relative to the ego car. Overall lane width is assumed to
% be 3.6m, typical highway lane width.
laneWidth = 3.6;
% 3. The ego car is assumed to be traveling in the middle of its lane, with
% 1.8m on each side of it. So, c=+1.8m for the left lane boundary and
% -1.8m for the right lane boundary.
halfLaneWidth = laneWidth/2;
% Initialize outputs and parameters
maxX = cast(1000, 'like', confirmedTracks.Tracks(1).State); % Far enough forward so that no track is expected to exceed this distance
trackID = 1;
for i = 1:confirmedTracks.NumTracks
position = positionSelector * confirmedTracks.Tracks(i).State;
x = position(1); % Longitudinal position of the track relative to ego
y = position(2); % Lateral position of the track relative to ego
if x < maxX && x > 0 % No point checking otherwise
yleftLane = polyval([curvature/2, 0, halfLaneWidth],x); % Half a lane to the left
yrightLane = polyval([curvature/2, 0, -halfLaneWidth],x); % Half a lane to the right
% Find a new lead car
if (yrightLane <= y) && (y <= yleftLane)
maxX = x;
trackID = i;
end
end
end
if trackID>0
mioState = confirmedTracks.Tracks(trackID).State;
else
mioState = inf(numStates,1,'like',confirmedTracks.Tracks(1).State);
end
% Output:
x = mioState(1); % Longitudinal position of the lead car
vx = mioState(2); % Longitudinal velocity of the lead car
mioTrack = trackID; % Index of the most important track2.车辆动力学模块
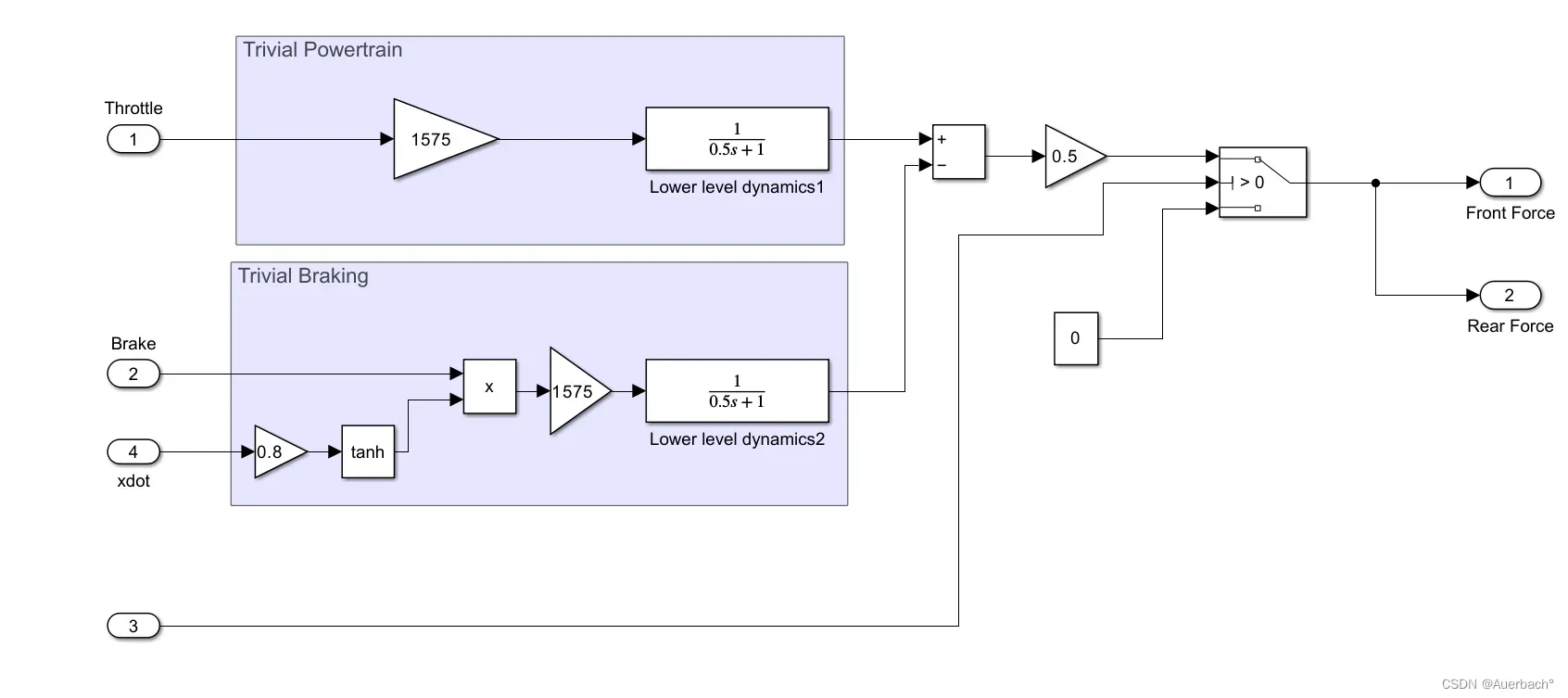
本小节采用matlab自带三自由度动力学模型进行车辆仿真:
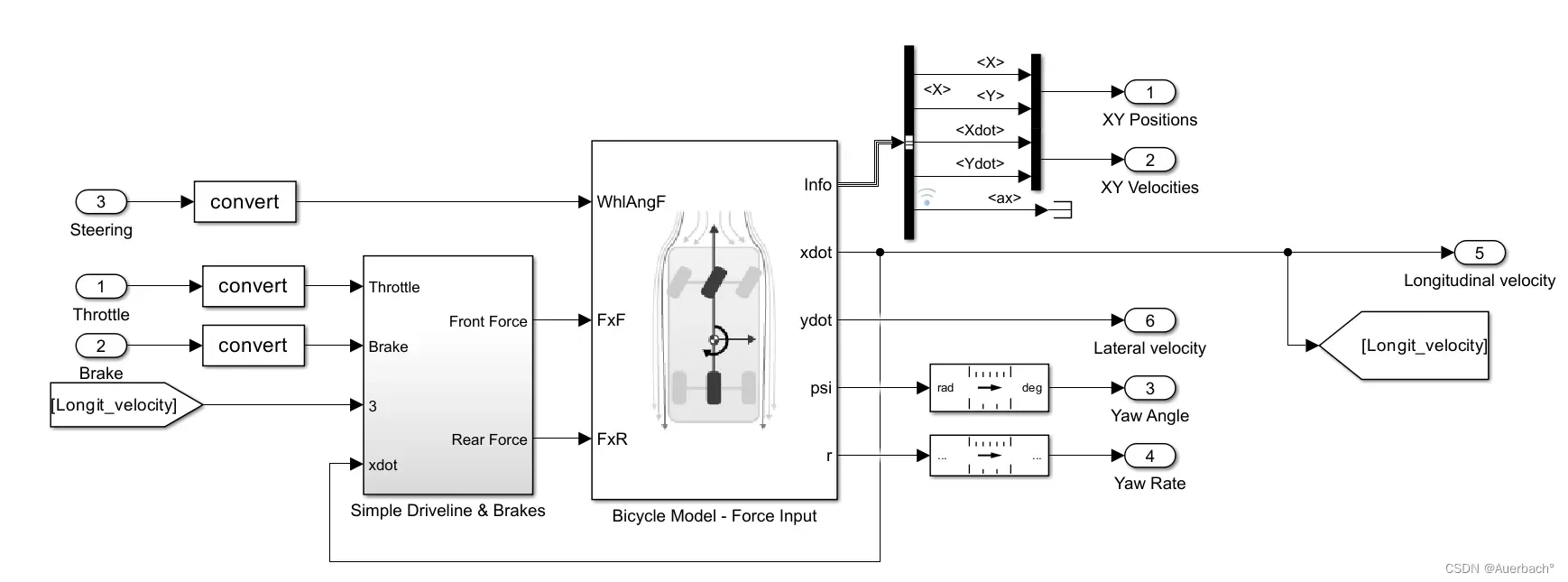
其中,Fx与油门刹车的对应关系如下:
输出量为动力学模型计算得到的X,Y的坐标以及车辆的横摆角速度,航向角和X,Y方向的速度。
3. AEB主算法模块搭建
AEB著算法模块建模如下:
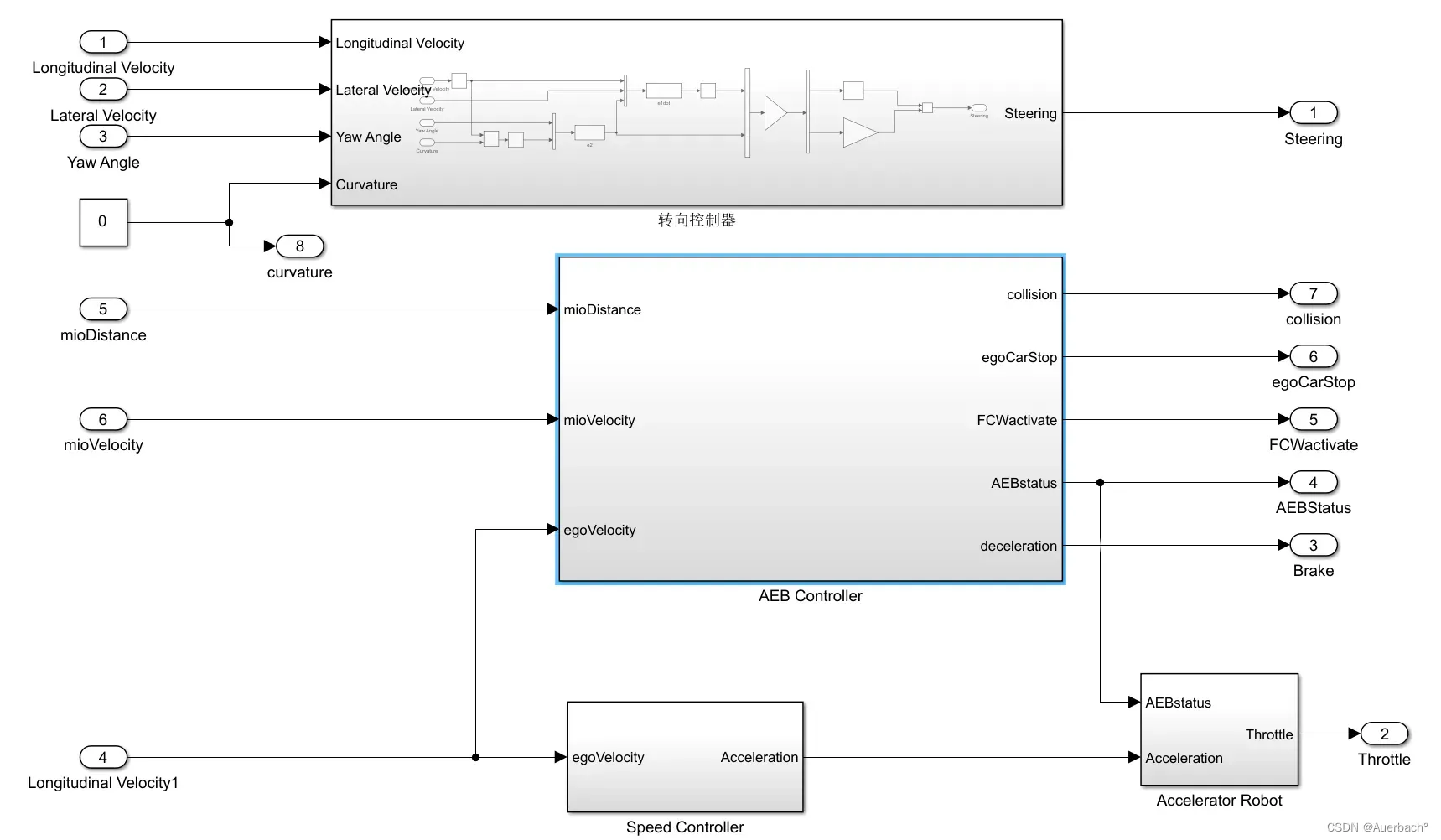
其中转向系的模拟模型如下,用于对驾驶员进行模拟,由道路曲率与车辆横摆角进行修正:

AEB主算法如下图:
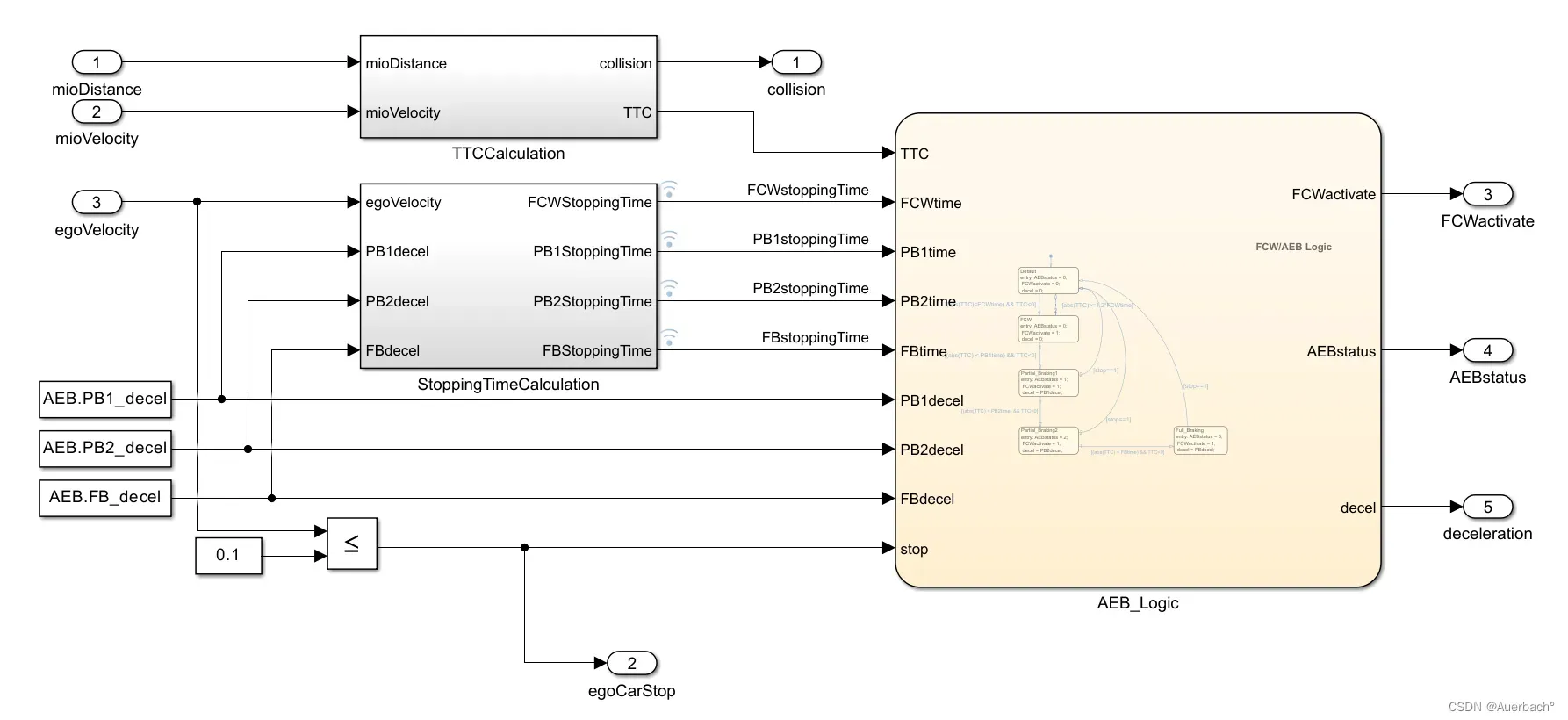
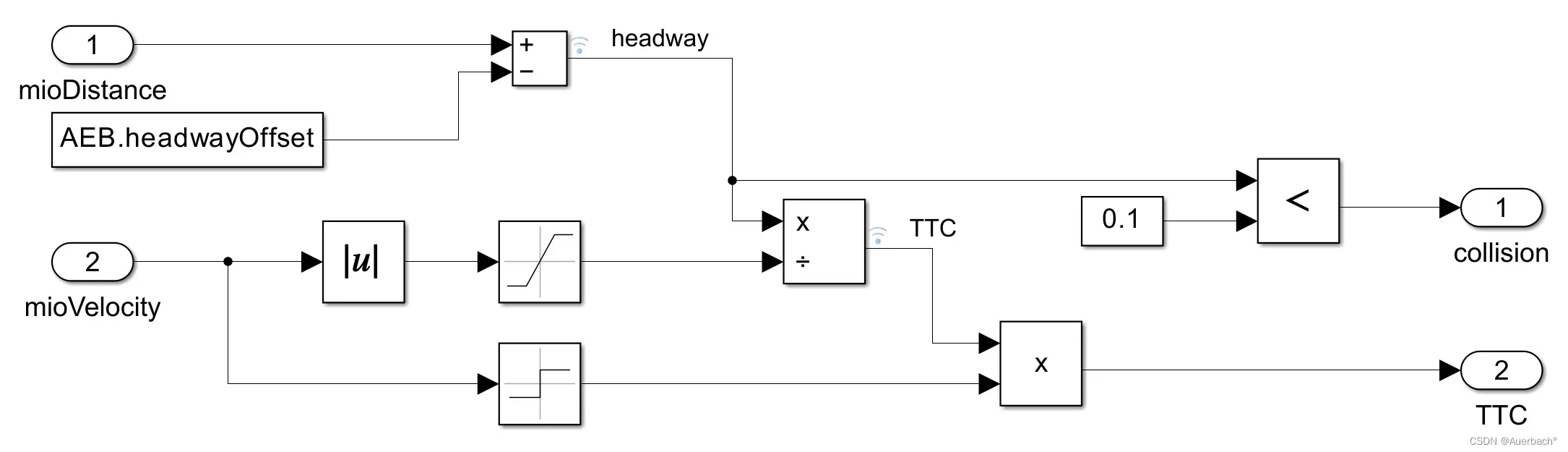
首先,采用之前得到的相对距离与相对速度计算剩余碰撞时间(ttc):
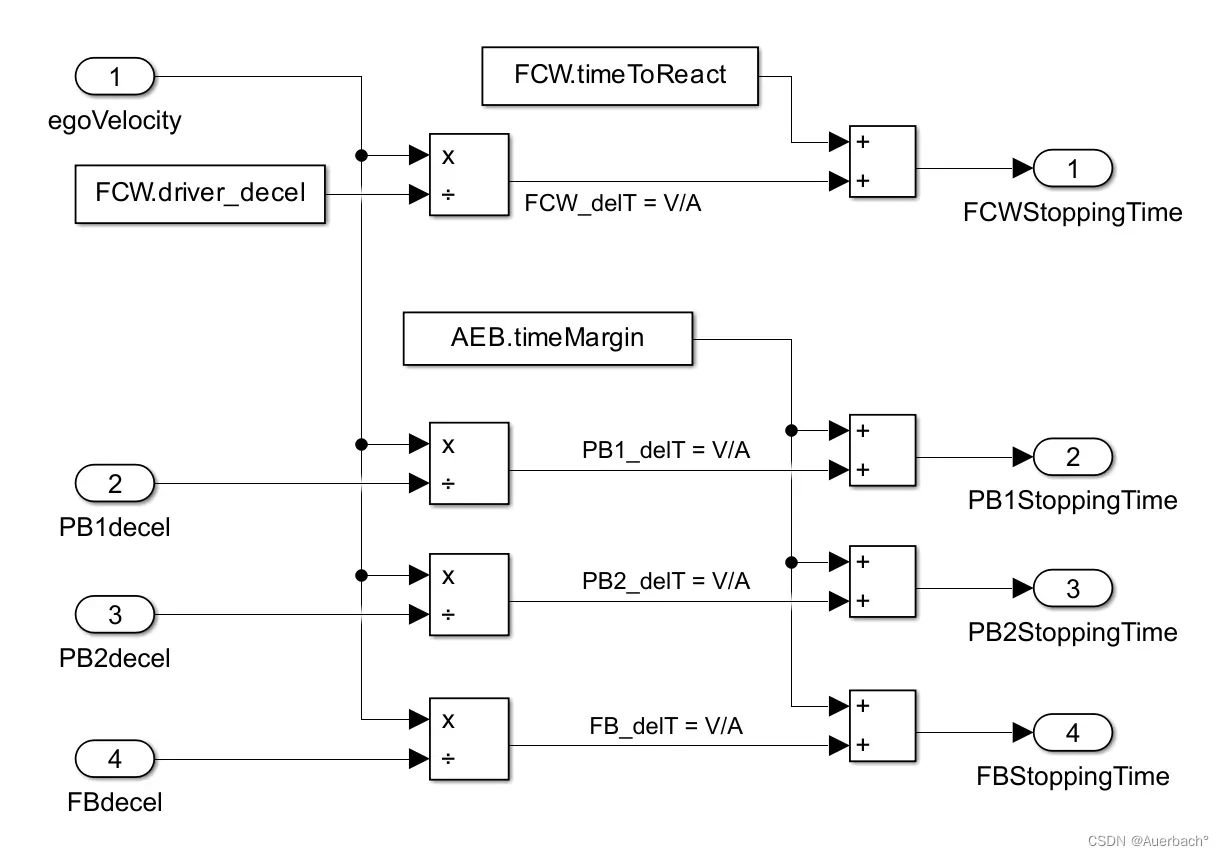
计算各个AEB模式下的碰撞时间,由于安全需要冗余,故加上一部分的反应时间:
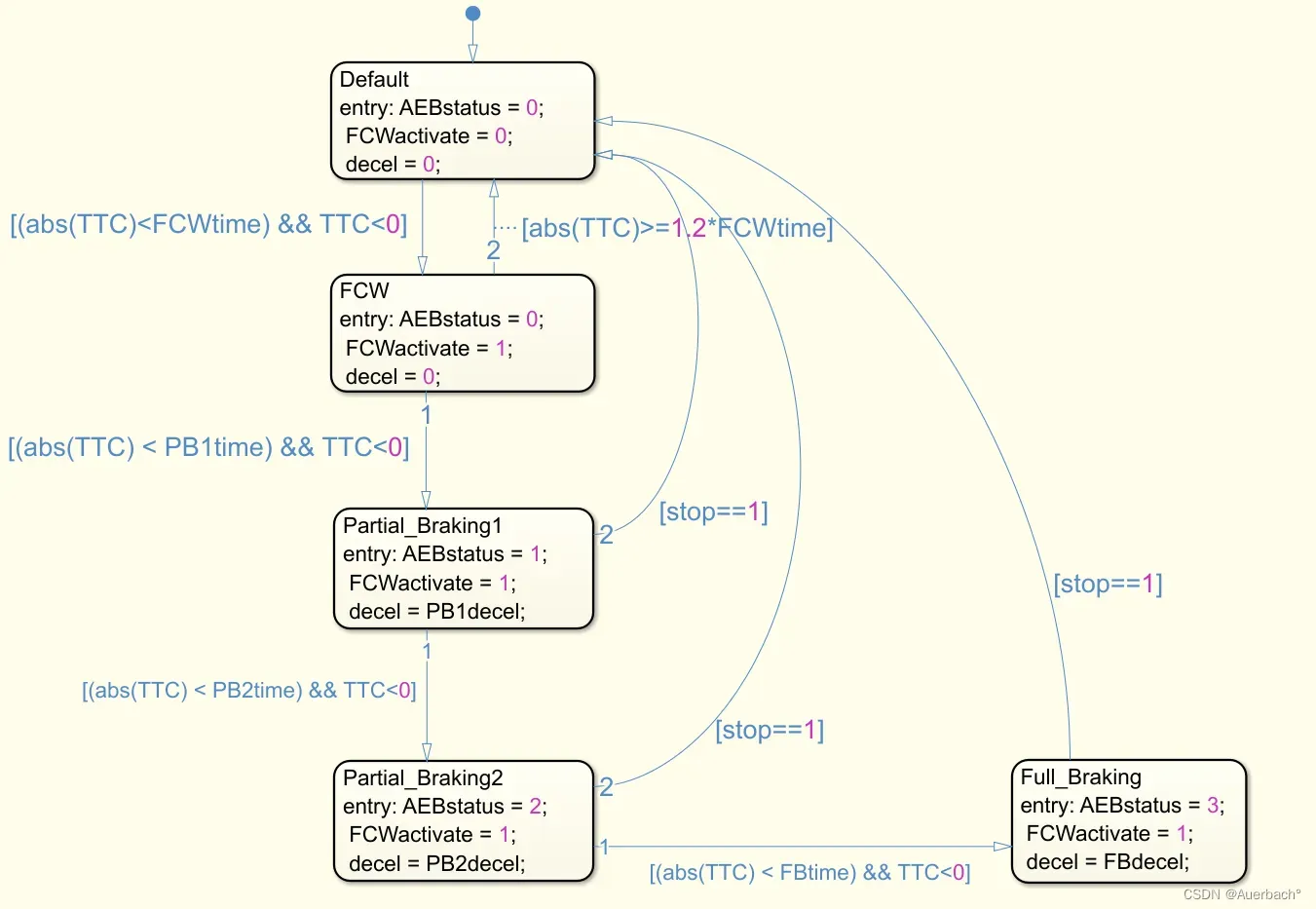
AEB的状态机调度如下,最终输出的为车辆的减速度:
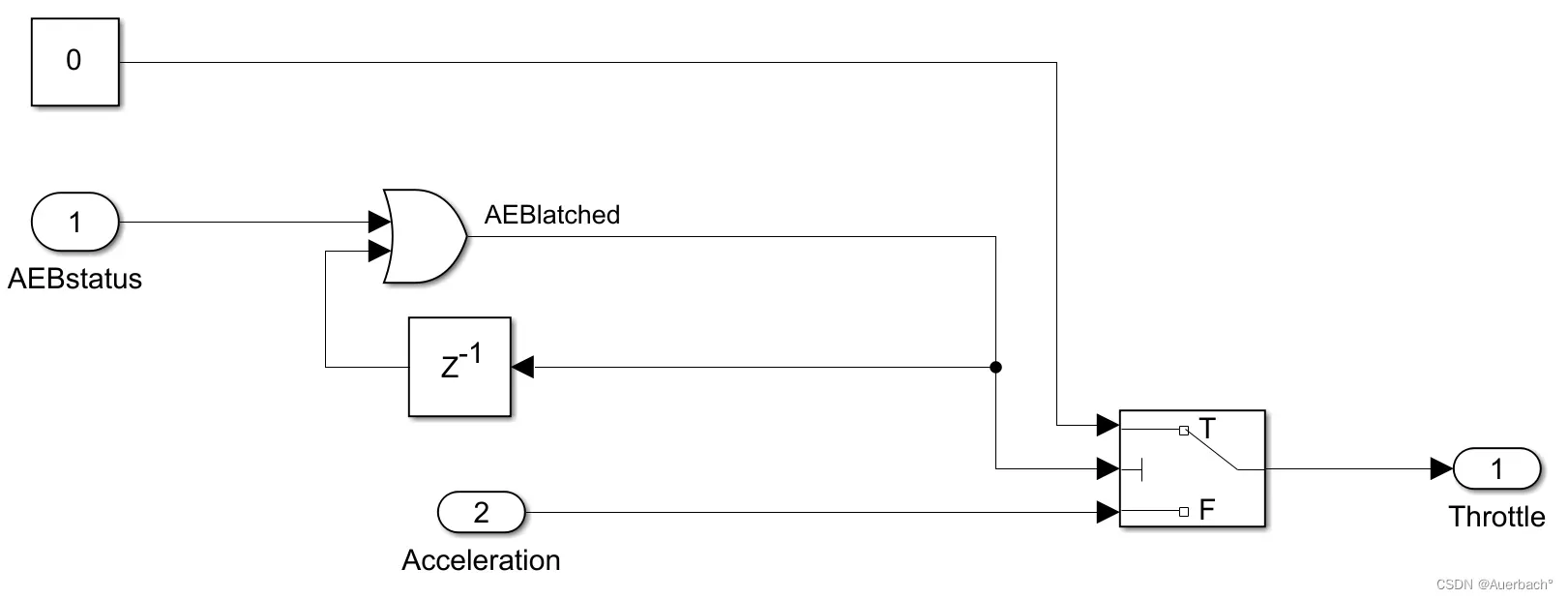
此外,车辆的速度控制器模型如下:
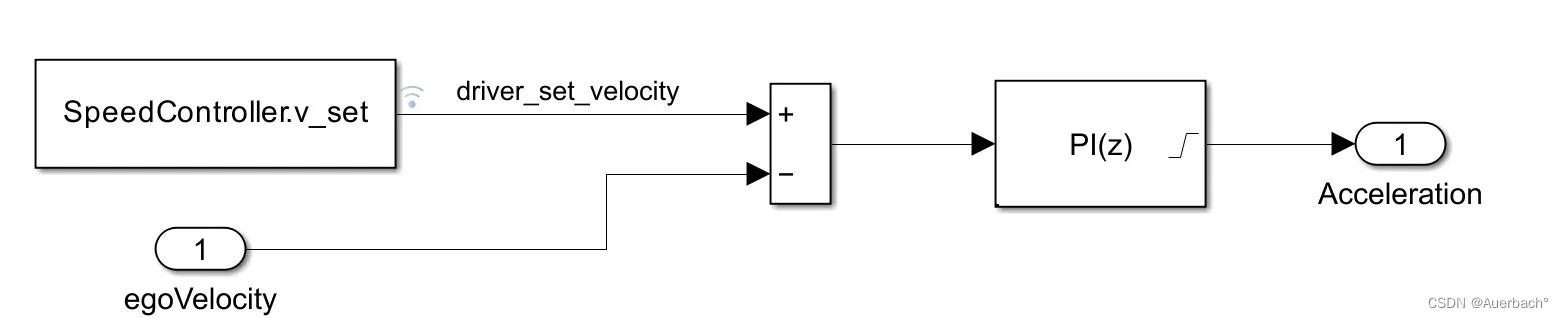
此模型实时对车速进行控制,当AEB不触发时,采用此速度控制器控制车速,当AEB触发时,将油门踏板置为0:
4.采用m脚本管理数据并进行测试
最后,采用m脚本对文中的总线数据和结构体数据进行管理,脚本如下:
clc
clear
% 速度控制器数据字典
SpeedController.v_set=5.5;%设定的速度
SpeedController.Kp=1.1;%PID控制器参数
SpeedController.Ki=0.1;%PID控制器参数
SpeedController.Amax=3;%速度控制器限幅
SpeedController.Amin=-3;%速度控制器限幅
% AEB主算法数据字典
AEB.PB1_decel=3.8;%AEB轻制动的制动减速度
AEB.PB2_decel=5.3;%AEB重制动的制动减速度
AEB.FB_decel=9.8;%AEB全制动的制动减速度
AEB.timeMargin=0;%AEB剩余碰撞时间时间裕值
AEB.headwayOffset=6.7;%相对距离安全裕值
%FCW功能数据字典
FCW.driver_decel=4;
FCW.timeToReact=1.2;
% 定义bus对象的属性
BusActors = Simulink.Bus;
BusActors.Description = '';
BusActors.DataScope = 'Auto';
BusActors.HeaderFile = '';
BusActors.Alignment = -1;
saveVarsTmp{1} = Simulink.BusElement;
saveVarsTmp{1}.Name = 'NumActors';
saveVarsTmp{1}.Complexity = 'real';
saveVarsTmp{1}.Dimensions = [1 1];
saveVarsTmp{1}.DataType = 'double';
saveVarsTmp{1}.Min = [];
saveVarsTmp{1}.Max = [];
saveVarsTmp{1}.DimensionsMode = 'Fixed';
saveVarsTmp{1}.SamplingMode = 'Sample based';
saveVarsTmp{1}.DocUnits = '';
saveVarsTmp{1}.Description = '';
saveVarsTmp{1}(2, 1) = Simulink.BusElement;
saveVarsTmp{1}(2, 1).Name = 'Time';
saveVarsTmp{1}(2, 1).Complexity = 'real';
saveVarsTmp{1}(2, 1).Dimensions = [1 1];
saveVarsTmp{1}(2, 1).DataType = 'double';
saveVarsTmp{1}(2, 1).Min = [];
saveVarsTmp{1}(2, 1).Max = [];
saveVarsTmp{1}(2, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(2, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(2, 1).DocUnits = '';
saveVarsTmp{1}(2, 1).Description = '';
saveVarsTmp{1}(3, 1) = Simulink.BusElement;
saveVarsTmp{1}(3, 1).Name = 'Actors';
saveVarsTmp{1}(3, 1).Complexity = 'real';
saveVarsTmp{1}(3, 1).Dimensions = [1 1];
saveVarsTmp{1}(3, 1).DataType = 'Bus: BusActorsActors';
saveVarsTmp{1}(3, 1).Min = [];
saveVarsTmp{1}(3, 1).Max = [];
saveVarsTmp{1}(3, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(3, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(3, 1).DocUnits = '';
saveVarsTmp{1}(3, 1).Description = '';
BusActors.Elements = saveVarsTmp{1};
clear saveVarsTmp;
%创建BusActorsActors的BUS数据类型
BusActorsActors = Simulink.Bus;
BusActorsActors.Description = '';
BusActorsActors.DataScope = 'Auto';
BusActorsActors.HeaderFile = '';
BusActorsActors.Alignment = -1;
saveVarsTmp{1} = Simulink.BusElement;
saveVarsTmp{1}.Name = 'ActorID';
saveVarsTmp{1}.Complexity = 'real';
saveVarsTmp{1}.Dimensions = [1 1];
saveVarsTmp{1}.DataType = 'double';
saveVarsTmp{1}.Min = [];
saveVarsTmp{1}.Max = [];
saveVarsTmp{1}.DimensionsMode = 'Fixed';
saveVarsTmp{1}.SamplingMode = 'Sample based';
saveVarsTmp{1}.DocUnits = '';
saveVarsTmp{1}.Description = '';
saveVarsTmp{1}(2, 1) = Simulink.BusElement;
saveVarsTmp{1}(2, 1).Name = 'Position';
saveVarsTmp{1}(2, 1).Complexity = 'real';
saveVarsTmp{1}(2, 1).Dimensions = [1 3];
saveVarsTmp{1}(2, 1).DataType = 'double';
saveVarsTmp{1}(2, 1).Min = [];
saveVarsTmp{1}(2, 1).Max = [];
saveVarsTmp{1}(2, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(2, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(2, 1).DocUnits = '';
saveVarsTmp{1}(2, 1).Description = '';
saveVarsTmp{1}(3, 1) = Simulink.BusElement;
saveVarsTmp{1}(3, 1).Name = 'Velocity';
saveVarsTmp{1}(3, 1).Complexity = 'real';
saveVarsTmp{1}(3, 1).Dimensions = [1 3];
saveVarsTmp{1}(3, 1).DataType = 'double';
saveVarsTmp{1}(3, 1).Min = [];
saveVarsTmp{1}(3, 1).Max = [];
saveVarsTmp{1}(3, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(3, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(3, 1).DocUnits = '';
saveVarsTmp{1}(3, 1).Description = '';
saveVarsTmp{1}(4, 1) = Simulink.BusElement;
saveVarsTmp{1}(4, 1).Name = 'Roll';
saveVarsTmp{1}(4, 1).Complexity = 'real';
saveVarsTmp{1}(4, 1).Dimensions = [1 1];
saveVarsTmp{1}(4, 1).DataType = 'double';
saveVarsTmp{1}(4, 1).Min = [];
saveVarsTmp{1}(4, 1).Max = [];
saveVarsTmp{1}(4, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(4, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(4, 1).DocUnits = '';
saveVarsTmp{1}(4, 1).Description = '';
saveVarsTmp{1}(5, 1) = Simulink.BusElement;
saveVarsTmp{1}(5, 1).Name = 'Pitch';
saveVarsTmp{1}(5, 1).Complexity = 'real';
saveVarsTmp{1}(5, 1).Dimensions = [1 1];
saveVarsTmp{1}(5, 1).DataType = 'double';
saveVarsTmp{1}(5, 1).Min = [];
saveVarsTmp{1}(5, 1).Max = [];
saveVarsTmp{1}(5, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(5, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(5, 1).DocUnits = '';
saveVarsTmp{1}(5, 1).Description = '';
saveVarsTmp{1}(6, 1) = Simulink.BusElement;
saveVarsTmp{1}(6, 1).Name = 'Yaw';
saveVarsTmp{1}(6, 1).Complexity = 'real';
saveVarsTmp{1}(6, 1).Dimensions = [1 1];
saveVarsTmp{1}(6, 1).DataType = 'double';
saveVarsTmp{1}(6, 1).Min = [];
saveVarsTmp{1}(6, 1).Max = [];
saveVarsTmp{1}(6, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(6, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(6, 1).DocUnits = '';
saveVarsTmp{1}(6, 1).Description = '';
saveVarsTmp{1}(7, 1) = Simulink.BusElement;
saveVarsTmp{1}(7, 1).Name = 'AngularVelocity';
saveVarsTmp{1}(7, 1).Complexity = 'real';
saveVarsTmp{1}(7, 1).Dimensions = [1 3];
saveVarsTmp{1}(7, 1).DataType = 'double';
saveVarsTmp{1}(7, 1).Min = [];
saveVarsTmp{1}(7, 1).Max = [];
saveVarsTmp{1}(7, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(7, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(7, 1).DocUnits = '';
saveVarsTmp{1}(7, 1).Description = '';
BusActorsActors.Elements = saveVarsTmp{1};
clear saveVarsTmp;
%创建BusMultiObjectTracker1总线数据类型
BusMultiObjectTracker1 = Simulink.Bus;
BusMultiObjectTracker1.Description = '';
BusMultiObjectTracker1.DataScope = 'Auto';
BusMultiObjectTracker1.HeaderFile = '';
BusMultiObjectTracker1.Alignment = -1;
saveVarsTmp{1} = Simulink.BusElement;
saveVarsTmp{1}.Name = 'NumTracks';
saveVarsTmp{1}.Complexity = 'real';
saveVarsTmp{1}.Dimensions = [1 1];
saveVarsTmp{1}.DataType = 'double';
saveVarsTmp{1}.Min = [];
saveVarsTmp{1}.Max = [];
saveVarsTmp{1}.DimensionsMode = 'Fixed';
saveVarsTmp{1}.SamplingMode = 'Sample based';
saveVarsTmp{1}.DocUnits = '';
saveVarsTmp{1}.Description = '';
saveVarsTmp{1}(2, 1) = Simulink.BusElement;
saveVarsTmp{1}(2, 1).Name = 'Tracks';
saveVarsTmp{1}(2, 1).Complexity = 'real';
saveVarsTmp{1}(2, 1).Dimensions = [20 1];
saveVarsTmp{1}(2, 1).DataType = 'Bus: BusMultiObjectTracker1Tracks';
saveVarsTmp{1}(2, 1).Min = [];
saveVarsTmp{1}(2, 1).Max = [];
saveVarsTmp{1}(2, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(2, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(2, 1).DocUnits = '';
saveVarsTmp{1}(2, 1).Description = '';
BusMultiObjectTracker1.Elements = saveVarsTmp{1};
clear saveVarsTmp;
%创建BusMultiObjectTracker1总线
BusMultiObjectTracker1 = Simulink.Bus;
BusMultiObjectTracker1.Description = '';
BusMultiObjectTracker1.DataScope = 'Auto';
BusMultiObjectTracker1.HeaderFile = '';
BusMultiObjectTracker1.Alignment = -1;
saveVarsTmp{1} = Simulink.BusElement;
saveVarsTmp{1}.Name = 'NumTracks';
saveVarsTmp{1}.Complexity = 'real';
saveVarsTmp{1}.Dimensions = [1 1];
saveVarsTmp{1}.DataType = 'double';
saveVarsTmp{1}.Min = [];
saveVarsTmp{1}.Max = [];
saveVarsTmp{1}.DimensionsMode = 'Fixed';
saveVarsTmp{1}.SamplingMode = 'Sample based';
saveVarsTmp{1}.DocUnits = '';
saveVarsTmp{1}.Description = '';
saveVarsTmp{1}(2, 1) = Simulink.BusElement;
saveVarsTmp{1}(2, 1).Name = 'Tracks';
saveVarsTmp{1}(2, 1).Complexity = 'real';
saveVarsTmp{1}(2, 1).Dimensions = [20 1];
saveVarsTmp{1}(2, 1).DataType = 'Bus: BusMultiObjectTracker1Tracks';
saveVarsTmp{1}(2, 1).Min = [];
saveVarsTmp{1}(2, 1).Max = [];
saveVarsTmp{1}(2, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(2, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(2, 1).DocUnits = '';
saveVarsTmp{1}(2, 1).Description = '';
BusMultiObjectTracker1.Elements = saveVarsTmp{1};
clear saveVarsTmp;
%创建BusMultiObjectTracker1Tracks总线
BusMultiObjectTracker1Tracks = Simulink.Bus;
BusMultiObjectTracker1Tracks.Description = '';
BusMultiObjectTracker1Tracks.DataScope = 'Auto';
BusMultiObjectTracker1Tracks.HeaderFile = '';
BusMultiObjectTracker1Tracks.Alignment = -1;
saveVarsTmp{1} = Simulink.BusElement;
%创建元素TrackID
saveVarsTmp{1} = Simulink.BusElement;
saveVarsTmp{1}.Name = 'TrackID';
saveVarsTmp{1}.Complexity = 'real';
saveVarsTmp{1}.Dimensions = [1 1];
saveVarsTmp{1}.DataType = 'double';
saveVarsTmp{1}.Min = [];
saveVarsTmp{1}.Max = [];
saveVarsTmp{1}.DimensionsMode = 'Fixed';
saveVarsTmp{1}.SamplingMode = 'Sample based';
saveVarsTmp{1}.DocUnits = '';
saveVarsTmp{1}.Description = '';
%创建元素BranchID
saveVarsTmp{1}(2, 1) = Simulink.BusElement;
saveVarsTmp{1}(2, 1).Name = 'BranchID';
saveVarsTmp{1}(2, 1).Complexity = 'real';
saveVarsTmp{1}(2, 1).Dimensions = [1 1];
saveVarsTmp{1}(2, 1).DataType = 'uint32';
saveVarsTmp{1}(2, 1).Min = [];
saveVarsTmp{1}(2, 1).Max = [];
saveVarsTmp{1}(2, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(2, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(2, 1).DocUnits = '';
saveVarsTmp{1}(2, 1).Description = '';
%创建元素SourceIndex
saveVarsTmp{1}(3, 1) = Simulink.BusElement;
saveVarsTmp{1}(3, 1).Name = 'SourceIndex';
saveVarsTmp{1}(3, 1).Complexity = 'real';
saveVarsTmp{1}(3, 1).Dimensions = [1 1];
saveVarsTmp{1}(3, 1).DataType = 'uint32';
saveVarsTmp{1}(3, 1).Min = [];
saveVarsTmp{1}(3, 1).Max = [];
saveVarsTmp{1}(3, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(3, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(3, 1).DocUnits = '';
saveVarsTmp{1}(3, 1).Description = '';
%创建元素UpdateTime
saveVarsTmp{1}(4, 1) = Simulink.BusElement;
saveVarsTmp{1}(4, 1).Name = 'UpdateTime';
saveVarsTmp{1}(4, 1).Complexity = 'real';
saveVarsTmp{1}(4, 1).Dimensions = [1 1];
saveVarsTmp{1}(4, 1).DataType = 'double';
saveVarsTmp{1}(4, 1).Min = [];
saveVarsTmp{1}(4, 1).Max = [];
saveVarsTmp{1}(4, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(4, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(4, 1).DocUnits = '';
saveVarsTmp{1}(4, 1).Description = '';
%创建元素Age
saveVarsTmp{1}(5, 1) = Simulink.BusElement;
saveVarsTmp{1}(5, 1).Name = 'Age';
saveVarsTmp{1}(5, 1).Complexity = 'real';
saveVarsTmp{1}(5, 1).Dimensions = [1 1];
saveVarsTmp{1}(5, 1).DataType = 'uint32';
saveVarsTmp{1}(5, 1).Min = [];
saveVarsTmp{1}(5, 1).Max = [];
saveVarsTmp{1}(5, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(5, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(5, 1).DocUnits = '';
saveVarsTmp{1}(5, 1).Description = '';
%创建元素State
saveVarsTmp{1}(6, 1) = Simulink.BusElement;
saveVarsTmp{1}(6, 1).Name = 'State';
saveVarsTmp{1}(6, 1).Complexity = 'real';
saveVarsTmp{1}(6, 1).Dimensions = [6 1];
saveVarsTmp{1}(6, 1).DataType = 'double';
saveVarsTmp{1}(6, 1).Min = [];
saveVarsTmp{1}(6, 1).Max = [];
saveVarsTmp{1}(6, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(6, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(6, 1).DocUnits = '';
saveVarsTmp{1}(6, 1).Description = '';
%创建元素StateCovariance
saveVarsTmp{1}(7, 1) = Simulink.BusElement;
saveVarsTmp{1}(7, 1).Name = 'StateCovariance';
saveVarsTmp{1}(7, 1).Complexity = 'real';
saveVarsTmp{1}(7, 1).Dimensions = [6 6];
saveVarsTmp{1}(7, 1).DataType = 'double';
saveVarsTmp{1}(7, 1).Min = [];
saveVarsTmp{1}(7, 1).Max = [];
saveVarsTmp{1}(7, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(7, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(7, 1).DocUnits = '';
saveVarsTmp{1}(7, 1).Description = '';
%创建元素ObjectClassID
saveVarsTmp{1}(8, 1) = Simulink.BusElement;
saveVarsTmp{1}(8, 1).Name = 'ObjectClassID';
saveVarsTmp{1}(8, 1).Complexity = 'real';
saveVarsTmp{1}(8, 1).Dimensions = [1 1];
saveVarsTmp{1}(8, 1).DataType = 'double';
saveVarsTmp{1}(8, 1).Min = [];
saveVarsTmp{1}(8, 1).Max = [];
saveVarsTmp{1}(8, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(8, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(8, 1).DocUnits = '';
saveVarsTmp{1}(8, 1).Description = '';
%创建元素TrackLogic
saveVarsTmp{1}(9, 1) = Simulink.BusElement;
saveVarsTmp{1}(9, 1).Name = 'TrackLogic';
saveVarsTmp{1}(9, 1).Complexity = 'real';
saveVarsTmp{1}(9, 1).Dimensions = [1 1];
saveVarsTmp{1}(9, 1).DataType = 'Enum: trackLogicType';
saveVarsTmp{1}(9, 1).Min = [];
saveVarsTmp{1}(9, 1).Max = [];
saveVarsTmp{1}(9, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(9, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(9, 1).DocUnits = '';
saveVarsTmp{1}(9, 1).Description = '';
%创建元素TrackLogicState
saveVarsTmp{1}(10, 1) = Simulink.BusElement;
saveVarsTmp{1}(10, 1).Name = 'TrackLogicState';
saveVarsTmp{1}(10, 1).Complexity = 'real';
saveVarsTmp{1}(10, 1).Dimensions = [1 3];
saveVarsTmp{1}(10, 1).DataType = 'boolean';
saveVarsTmp{1}(10, 1).Min = [];
saveVarsTmp{1}(10, 1).Max = [];
saveVarsTmp{1}(10, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(10, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(10, 1).DocUnits = '';
saveVarsTmp{1}(10, 1).Description = '';
%创建元素IsConfirmed
saveVarsTmp{1}(11, 1) = Simulink.BusElement;
saveVarsTmp{1}(11, 1).Name = 'IsConfirmed';
saveVarsTmp{1}(11, 1).Complexity = 'real';
saveVarsTmp{1}(11, 1).Dimensions = [1 1];
saveVarsTmp{1}(11, 1).DataType = 'boolean';
saveVarsTmp{1}(11, 1).Min = [];
saveVarsTmp{1}(11, 1).Max = [];
saveVarsTmp{1}(11, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(11, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(11, 1).DocUnits = '';
saveVarsTmp{1}(11, 1).Description = '';
%创建元素IsCoasted
saveVarsTmp{1}(12, 1) = Simulink.BusElement;
saveVarsTmp{1}(12, 1).Name = 'IsCoasted';
saveVarsTmp{1}(12, 1).Complexity = 'real';
saveVarsTmp{1}(12, 1).Dimensions = [1 1];
saveVarsTmp{1}(12, 1).DataType = 'boolean';
saveVarsTmp{1}(12, 1).Min = [];
saveVarsTmp{1}(12, 1).Max = [];
saveVarsTmp{1}(12, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(12, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(12, 1).DocUnits = '';
saveVarsTmp{1}(12, 1).Description = '';
%创建元素IsSelfReported
saveVarsTmp{1}(13, 1) = Simulink.BusElement;
saveVarsTmp{1}(13, 1).Name = 'IsSelfReported';
saveVarsTmp{1}(13, 1).Complexity = 'real';
saveVarsTmp{1}(13, 1).Dimensions = [1 1];
saveVarsTmp{1}(13, 1).DataType = 'boolean';
saveVarsTmp{1}(13, 1).Min = [];
saveVarsTmp{1}(13, 1).Max = [];
saveVarsTmp{1}(13, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(13, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(13, 1).DocUnits = '';
saveVarsTmp{1}(13, 1).Description = '';
%创建总线元素ObjectAttributes
saveVarsTmp{1}(14, 1) = Simulink.BusElement;
saveVarsTmp{1}(14, 1).Name = 'ObjectAttributes';
saveVarsTmp{1}(14, 1).Complexity = 'real';
saveVarsTmp{1}(14, 1).Dimensions = [2 1];
saveVarsTmp{1}(14, 1).DataType = 'Bus: BusRadarDetectionsObjectAttributes';
saveVarsTmp{1}(14, 1).Min = [];
saveVarsTmp{1}(14, 1).Max = [];
saveVarsTmp{1}(14, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(14, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(14, 1).DocUnits = '';
saveVarsTmp{1}(14, 1).Description = '';
BusMultiObjectTracker1Tracks.Elements = saveVarsTmp{1};
%创建总线BusRadarDetectionsObjectAttributes
BusRadarDetectionsObjectAttributes = Simulink.Bus;
BusRadarDetectionsObjectAttributes.Description = '';
BusRadarDetectionsObjectAttributes.DataScope = 'Auto';
BusRadarDetectionsObjectAttributes.HeaderFile = '';
BusRadarDetectionsObjectAttributes.Alignment = -1;
saveVarsTmp{1} = Simulink.BusElement;
%创建元素TargetIndex
saveVarsTmp{1}(1, 1).Name = 'TargetIndex';
saveVarsTmp{1}(1, 1).Complexity = 'real';
saveVarsTmp{1}(1, 1).Dimensions = [1 1];
saveVarsTmp{1}(1, 1).DataType = 'double';
saveVarsTmp{1}(1, 1).Min = [];
saveVarsTmp{1}(1, 1).Max = [];
saveVarsTmp{1}(1, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(1, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(1, 1).DocUnits = '';
saveVarsTmp{1}(1, 1).Description = '';
%创建元素SNR
saveVarsTmp{1}(2, 1).Name = 'SNR';
saveVarsTmp{1}(2, 1).Complexity = 'real';
saveVarsTmp{1}(2, 1).Dimensions = [1 1];
saveVarsTmp{1}(2, 1).DataType = 'double';
saveVarsTmp{1}(2, 1).Min = [];
saveVarsTmp{1}(2, 1).Max = [];
saveVarsTmp{1}(2, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(2, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(2, 1).DocUnits = '';
saveVarsTmp{1}(2, 1).Description = '';
BusRadarDetectionsObjectAttributes.Elements = saveVarsTmp{1};
%创建总线BusRadar
BusRadar = Simulink.Bus;
BusRadar.Description = '';
BusRadar.DataScope = 'Auto';
BusRadar.HeaderFile = '';
BusRadar.Alignment = -1;
saveVarsTmp{1} = Simulink.BusElement;
%创建元素NumDetections
saveVarsTmp{1}(1, 1).Name = 'NumDetections';
saveVarsTmp{1}(1, 1).Complexity = 'real';
saveVarsTmp{1}(1, 1).Dimensions = [1 1];
saveVarsTmp{1}(1, 1).DataType = 'double';
saveVarsTmp{1}(1, 1).Min = [];
saveVarsTmp{1}(1, 1).Max = [];
saveVarsTmp{1}(1, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(1, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(1, 1).DocUnits = '';
saveVarsTmp{1}(1, 1).Description = '';
%创建元素IsValidTime
saveVarsTmp{1}(2, 1).Name = 'IsValidTime';
saveVarsTmp{1}(2, 1).Complexity = 'real';
saveVarsTmp{1}(2, 1).Dimensions = [1 1];
saveVarsTmp{1}(2, 1).DataType = 'Boolean';
saveVarsTmp{1}(2, 1).Min = [];
saveVarsTmp{1}(2, 1).Max = [];
saveVarsTmp{1}(2, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(2, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(2, 1).DocUnits = '';
saveVarsTmp{1}(2, 1).Description = '';
%创建总线元素Detections
saveVarsTmp{1}(3, 1).Name = 'Detections';
saveVarsTmp{1}(3, 1).Complexity = 'real';
saveVarsTmp{1}(3, 1).Dimensions = [50 1];
saveVarsTmp{1}(3, 1).DataType = 'Bus: BusRadarDetections';
saveVarsTmp{1}(3, 1).Min = [];
saveVarsTmp{1}(3, 1).Max = [];
saveVarsTmp{1}(3, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(3, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(3, 1).DocUnits = '';
saveVarsTmp{1}(3, 1).Description = '';
BusRadar.Elements = saveVarsTmp{1};
%创建总线BusRadarDetections
BusRadarDetections = Simulink.Bus;
BusRadarDetections.Description = '';
BusRadarDetections.DataScope = 'Auto';
BusRadarDetections.HeaderFile = '';
BusRadarDetections.Alignment = -1;
saveVarsTmp{1} = Simulink.BusElement;
%创建元素Time
saveVarsTmp{1}(1, 1).Name = 'Time';
saveVarsTmp{1}(1, 1).Complexity = 'real';
saveVarsTmp{1}(1, 1).Dimensions = [1 1];
saveVarsTmp{1}(1, 1).DataType = 'double';
saveVarsTmp{1}(1, 1).Min = [];
saveVarsTmp{1}(1, 1).Max = [];
saveVarsTmp{1}(1, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(1, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(1, 1).DocUnits = '';
saveVarsTmp{1}(1, 1).Description = '';
%创建元素Measurement
saveVarsTmp{1}(2, 1).Name = 'Measurement';
saveVarsTmp{1}(2, 1).Complexity = 'real';
saveVarsTmp{1}(2, 1).Dimensions = [6 1];
saveVarsTmp{1}(2, 1).DataType = 'double';
saveVarsTmp{1}(2, 1).Min = [];
saveVarsTmp{1}(2, 1).Max = [];
saveVarsTmp{1}(2, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(2, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(2, 1).DocUnits = '';
saveVarsTmp{1}(2, 1).Description = '';
%创建元素MeasurementNoise
saveVarsTmp{1}(3, 1).Name = 'MeasurementNoise';
saveVarsTmp{1}(3, 1).Complexity = 'real';
saveVarsTmp{1}(3, 1).Dimensions = [6 6];
saveVarsTmp{1}(3, 1).DataType = 'double';
saveVarsTmp{1}(3, 1).Min = [];
saveVarsTmp{1}(3, 1).Max = [];
saveVarsTmp{1}(3, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(3, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(3, 1).DocUnits = '';
saveVarsTmp{1}(3, 1).Description = '';
%创建元素SensorIndex
saveVarsTmp{1}(4, 1).Name = 'SensorIndex';
saveVarsTmp{1}(4, 1).Complexity = 'real';
saveVarsTmp{1}(4, 1).Dimensions = [1 1];
saveVarsTmp{1}(4, 1).DataType = 'double';
saveVarsTmp{1}(4, 1).Min = [];
saveVarsTmp{1}(4, 1).Max = [];
saveVarsTmp{1}(4, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(4, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(4, 1).DocUnits = '';
saveVarsTmp{1}(4, 1).Description = '';
%创建元素ObjectClassID
saveVarsTmp{1}(5, 1).Name = 'ObjectClassID';
saveVarsTmp{1}(5, 1).Complexity = 'real';
saveVarsTmp{1}(5, 1).Dimensions = [1 1];
saveVarsTmp{1}(5, 1).DataType = 'doubler';
saveVarsTmp{1}(5, 1).Min = [];
saveVarsTmp{1}(5, 1).Max = [];
saveVarsTmp{1}(5, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(5, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(5, 1).DocUnits = '';
saveVarsTmp{1}(5, 1).Description = '';
%创建总线元素MeasurementParameters
saveVarsTmp{1}(6, 1).Name = 'MeasurementParameters';
saveVarsTmp{1}(6, 1).Complexity = 'real';
saveVarsTmp{1}(6, 1).Dimensions = [1 1];
saveVarsTmp{1}(6, 1).DataType = 'Bus: BusRadarDetectionsMeasurementParameters';
saveVarsTmp{1}(6, 1).Min = [];
saveVarsTmp{1}(6, 1).Max = [];
saveVarsTmp{1}(6, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(6, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(6, 1).DocUnits = '';
saveVarsTmp{1}(6, 1).Description = '';
%创建总线元素ObjectAttributes
saveVarsTmp{1}(7, 1).Name = 'ObjectAttributes';
saveVarsTmp{1}(7, 1).Complexity = 'real';
saveVarsTmp{1}(7, 1).Dimensions = [1 1];
saveVarsTmp{1}(7, 1).DataType = 'Bus: BusRadarDetectionsObjectAttributes';
saveVarsTmp{1}(7, 1).Min = [];
saveVarsTmp{1}(7, 1).Max = [];
saveVarsTmp{1}(7, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(7, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(7, 1).DocUnits = '';
saveVarsTmp{1}(7, 1).Description = '';
BusRadarDetections.Elements = saveVarsTmp{1};
%创建总线BusRadarDetectionsMeasurementParameters
BusRadarDetectionsMeasurementParameters = Simulink.Bus;
BusRadarDetectionsMeasurementParameters.Description = '';
BusRadarDetectionsMeasurementParameters.DataScope = 'Auto';
BusRadarDetectionsMeasurementParameters.HeaderFile = '';
BusRadarDetectionsMeasurementParameters.Alignment = -1;
saveVarsTmp{1} = Simulink.BusElement;
%创建元素Frame
saveVarsTmp{1}(1, 1).Name = 'Frame';
saveVarsTmp{1}(1, 1).Complexity = 'real';
saveVarsTmp{1}(1, 1).Dimensions = [1 1];
saveVarsTmp{1}(1, 1).DataType = 'Enum: drivingCoordinateFrameType';
saveVarsTmp{1}(1, 1).Min = [];
saveVarsTmp{1}(1, 1).Max = [];
saveVarsTmp{1}(1, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(1, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(1, 1).DocUnits = '';
saveVarsTmp{1}(1, 1).Description = '';
%创建元素OriginPosition
saveVarsTmp{1}(2, 1).Name = 'OriginPosition';
saveVarsTmp{1}(2, 1).Complexity = 'real';
saveVarsTmp{1}(2, 1).Dimensions = [3 1];
saveVarsTmp{1}(2, 1).DataType = 'double';
saveVarsTmp{1}(2, 1).Min = [];
saveVarsTmp{1}(2, 1).Max = [];
saveVarsTmp{1}(2, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(2, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(2, 1).DocUnits = '';
saveVarsTmp{1}(2, 1).Description = '';
%创建元素OriginVelocity
saveVarsTmp{1}(3, 1).Name = 'OriginVelocity';
saveVarsTmp{1}(3, 1).Complexity = 'real';
saveVarsTmp{1}(3, 1).Dimensions = [3 1];
saveVarsTmp{1}(3, 1).DataType = 'double';
saveVarsTmp{1}(3, 1).Min = [];
saveVarsTmp{1}(3, 1).Max = [];
saveVarsTmp{1}(3, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(3, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(3, 1).DocUnits = '';
saveVarsTmp{1}(3, 1).Description = '';
%创建元素Orientation
saveVarsTmp{1}(4, 1).Name = 'Orientation';
saveVarsTmp{1}(4, 1).Complexity = 'real';
saveVarsTmp{1}(4, 1).Dimensions = [3 3];
saveVarsTmp{1}(4, 1).DataType = 'double';
saveVarsTmp{1}(4, 1).Min = [];
saveVarsTmp{1}(4, 1).Max = [];
saveVarsTmp{1}(4, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(4, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(4, 1).DocUnits = '';
saveVarsTmp{1}(4, 1).Description = '';
%创建元素IsParentToChild
saveVarsTmp{1}(5, 1).Name = 'IsParentToChild';
saveVarsTmp{1}(5, 1).Complexity = 'real';
saveVarsTmp{1}(5, 1).Dimensions = [1 1];
saveVarsTmp{1}(5, 1).DataType = 'boolean';
saveVarsTmp{1}(5, 1).Min = [];
saveVarsTmp{1}(5, 1).Max = [];
saveVarsTmp{1}(5, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(5, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(5, 1).DocUnits = '';
saveVarsTmp{1}(5, 1).Description = '';
%创建总线元素HasAzimuth
saveVarsTmp{1}(6, 1).Name = 'HasAzimuth';
saveVarsTmp{1}(6, 1).Complexity = 'real';
saveVarsTmp{1}(6, 1).Dimensions = [1 1];
saveVarsTmp{1}(6, 1).DataType = 'boolean';
saveVarsTmp{1}(6, 1).Min = [];
saveVarsTmp{1}(6, 1).Max = [];
saveVarsTmp{1}(6, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(6, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(6, 1).DocUnits = '';
saveVarsTmp{1}(6, 1).Description = '';
%创建总线元素HasElevation
saveVarsTmp{1}(7, 1).Name = 'HasElevation';
saveVarsTmp{1}(7, 1).Complexity = 'real';
saveVarsTmp{1}(7, 1).Dimensions = [1 1];
saveVarsTmp{1}(7, 1).DataType = 'boolean';
saveVarsTmp{1}(7, 1).Min = [];
saveVarsTmp{1}(7, 1).Max = [];
saveVarsTmp{1}(7, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(7, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(7, 1).DocUnits = '';
saveVarsTmp{1}(7, 1).Description = '';
%创建总线元素HasRange
saveVarsTmp{1}(8, 1).Name = 'HasRange';
saveVarsTmp{1}(8, 1).Complexity = 'real';
saveVarsTmp{1}(8, 1).Dimensions = [1 1];
saveVarsTmp{1}(8, 1).DataType = 'boolean';
saveVarsTmp{1}(8, 1).Min = [];
saveVarsTmp{1}(8, 1).Max = [];
saveVarsTmp{1}(8, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(8, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(8, 1).DocUnits = '';
saveVarsTmp{1}(8, 1).Description = '';
%创建总线元素HasVelocity
saveVarsTmp{1}(9, 1).Name = 'HasVelocity';
saveVarsTmp{1}(9, 1).Complexity = 'real';
saveVarsTmp{1}(9, 1).Dimensions = [1 1];
saveVarsTmp{1}(9, 1).DataType = 'boolean';
saveVarsTmp{1}(9, 1).Min = [];
saveVarsTmp{1}(9, 1).Max = [];
saveVarsTmp{1}(9, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(9, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(9, 1).DocUnits = '';
saveVarsTmp{1}(9, 1).Description = '';
BusRadarDetectionsMeasurementParameters.Elements = saveVarsTmp{1};
%创建总线BusVision
BusVision = Simulink.Bus;
BusVision.Description = '';
BusVision.DataScope = 'Auto';
BusVision.HeaderFile = '';
BusVision.Alignment = -1;
saveVarsTmp{1} = Simulink.BusElement;
%创建元素NumDetections
saveVarsTmp{1}(1, 1).Name = 'NumDetections';
saveVarsTmp{1}(1, 1).Complexity = 'real';
saveVarsTmp{1}(1, 1).Dimensions = [1 1];
saveVarsTmp{1}(1, 1).DataType = 'double';
saveVarsTmp{1}(1, 1).Min = [];
saveVarsTmp{1}(1, 1).Max = [];
saveVarsTmp{1}(1, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(1, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(1, 1).DocUnits = '';
saveVarsTmp{1}(1, 1).Description = '';
%创建元素IsValidTime
saveVarsTmp{1}(2, 1).Name = 'IsValidTime';
saveVarsTmp{1}(2, 1).Complexity = 'real';
saveVarsTmp{1}(2, 1).Dimensions = [1 1];
saveVarsTmp{1}(2, 1).DataType = 'boolean';
saveVarsTmp{1}(2, 1).Min = [];
saveVarsTmp{1}(2, 1).Max = [];
saveVarsTmp{1}(2, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(2, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(2, 1).DocUnits = '';
saveVarsTmp{1}(2, 1).Description = '';
%创建元素Detections
saveVarsTmp{1}(3, 1).Name = 'Detections';
saveVarsTmp{1}(3, 1).Complexity = 'real';
saveVarsTmp{1}(3, 1).Dimensions = [20 1];
saveVarsTmp{1}(3, 1).DataType = 'Bus: BusVisionDetections';
saveVarsTmp{1}(3, 1).Min = [];
saveVarsTmp{1}(3, 1).Max = [];
saveVarsTmp{1}(3, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(3, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(3, 1).DocUnits = '';
saveVarsTmp{1}(3, 1).Description = '';
BusVision.Elements = saveVarsTmp{1};
%创建总线BusVisionDetections
BusVisionDetections = Simulink.Bus;
BusVisionDetections.Description = '';
BusVisionDetections.DataScope = 'Auto';
BusVisionDetections.HeaderFile = '';
BusVisionDetections.Alignment = -1;
saveVarsTmp{1} = Simulink.BusElement;
%创建元素Time
saveVarsTmp{1}(1, 1).Name = 'Time';
saveVarsTmp{1}(1, 1).Complexity = 'real';
saveVarsTmp{1}(1, 1).Dimensions = [1 1];
saveVarsTmp{1}(1, 1).DataType = 'double';
saveVarsTmp{1}(1, 1).Min = [];
saveVarsTmp{1}(1, 1).Max = [];
saveVarsTmp{1}(1, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(1, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(1, 1).DocUnits = '';
saveVarsTmp{1}(1, 1).Description = '';
%创建元素Measurement
saveVarsTmp{1}(2, 1).Name = 'Measurement';
saveVarsTmp{1}(2, 1).Complexity = 'real';
saveVarsTmp{1}(2, 1).Dimensions = [6 1];
saveVarsTmp{1}(2, 1).DataType = 'double';
saveVarsTmp{1}(2, 1).Min = [];
saveVarsTmp{1}(2, 1).Max = [];
saveVarsTmp{1}(2, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(2, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(2, 1).DocUnits = '';
saveVarsTmp{1}(2, 1).Description = '';
%创建元素MeasurementNoise
saveVarsTmp{1}(3, 1).Name = 'MeasurementNoise';
saveVarsTmp{1}(3, 1).Complexity = 'real';
saveVarsTmp{1}(3, 1).Dimensions = [6 6];
saveVarsTmp{1}(3, 1).DataType = 'double';
saveVarsTmp{1}(3, 1).Min = [];
saveVarsTmp{1}(3, 1).Max = [];
saveVarsTmp{1}(3, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(3, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(3, 1).DocUnits = '';
saveVarsTmp{1}(3, 1).Description = '';
%创建元素SensorIndex
saveVarsTmp{1}(4, 1).Name = 'SensorIndex';
saveVarsTmp{1}(4, 1).Complexity = 'real';
saveVarsTmp{1}(4, 1).Dimensions = [1 1];
saveVarsTmp{1}(4, 1).DataType = 'double';
saveVarsTmp{1}(4, 1).Min = [];
saveVarsTmp{1}(4, 1).Max = [];
saveVarsTmp{1}(4, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(4, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(4, 1).DocUnits = '';
saveVarsTmp{1}(4, 1).Description = '';
%创建元素ObjectClassID
saveVarsTmp{1}(5, 1).Name = 'ObjectClassID';
saveVarsTmp{1}(5, 1).Complexity = 'real';
saveVarsTmp{1}(5, 1).Dimensions = [1 1];
saveVarsTmp{1}(5, 1).DataType = 'double';
saveVarsTmp{1}(5, 1).Min = [];
saveVarsTmp{1}(5, 1).Max = [];
saveVarsTmp{1}(5, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(5, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(5, 1).DocUnits = '';
saveVarsTmp{1}(5, 1).Description = '';
BusVisionDetections.Elements = saveVarsTmp{1};
%创建总线元素MeasurementParameters
saveVarsTmp{1}(6, 1).Name = 'MeasurementParameters';
saveVarsTmp{1}(6, 1).Complexity = 'real';
saveVarsTmp{1}(6, 1).Dimensions = [1 1];
saveVarsTmp{1}(6, 1).DataType = 'Bus: BusVisionDetectionsMeasurementParameters';
saveVarsTmp{1}(6, 1).Min = [];
saveVarsTmp{1}(6, 1).Max = [];
saveVarsTmp{1}(6, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(6, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(6, 1).DocUnits = '';
saveVarsTmp{1}(6, 1).Description = '';
BusVisionDetections.Elements = saveVarsTmp{1};
%创建总线元素ObjectAttributes
saveVarsTmp{1}(7, 1).Name = 'ObjectAttributes';
saveVarsTmp{1}(7, 1).Complexity = 'real';
saveVarsTmp{1}(7, 1).Dimensions = [1 1];
saveVarsTmp{1}(7, 1).DataType = 'Bus: BusVisionDetectionsObjectAttributes';
saveVarsTmp{1}(7, 1).Min = [];
saveVarsTmp{1}(7, 1).Max = [];
saveVarsTmp{1}(7, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(7, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(7, 1).DocUnits = '';
saveVarsTmp{1}(7, 1).Description = '';
BusVisionDetections.Elements = saveVarsTmp{1};
%创建总线BusVisionDetectionsMeasurementParameters
BusVisionDetectionsMeasurementParameters = Simulink.Bus;
BusVisionDetectionsMeasurementParameters.Description = '';
BusVisionDetectionsMeasurementParameters.DataScope = 'Auto';
BusVisionDetectionsMeasurementParameters.HeaderFile = '';
BusVisionDetectionsMeasurementParameters.Alignment = -1;
saveVarsTmp{1} = Simulink.BusElement;
%创建元素Frame
saveVarsTmp{1}(1, 1).Name = 'Frame';
saveVarsTmp{1}(1, 1).Complexity = 'real';
saveVarsTmp{1}(1, 1).Dimensions = [1 1];
saveVarsTmp{1}(1, 1).DataType = 'Enum: drivingCoordinateFrameType';
saveVarsTmp{1}(1, 1).Min = [];
saveVarsTmp{1}(1, 1).Max = [];
saveVarsTmp{1}(1, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(1, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(1, 1).DocUnits = '';
saveVarsTmp{1}(1, 1).Description = '';
%创建元素OriginPosition
saveVarsTmp{1}(2, 1).Name = 'OriginPosition';
saveVarsTmp{1}(2, 1).Complexity = 'real';
saveVarsTmp{1}(2, 1).Dimensions = [3 1];
saveVarsTmp{1}(2, 1).DataType = 'double';
saveVarsTmp{1}(2, 1).Min = [];
saveVarsTmp{1}(2, 1).Max = [];
saveVarsTmp{1}(2, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(2, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(2, 1).DocUnits = '';
saveVarsTmp{1}(2, 1).Description = '';
%创建元素Orientation
saveVarsTmp{1}(3, 1).Name = 'Orientation';
saveVarsTmp{1}(3, 1).Complexity = 'real';
saveVarsTmp{1}(3, 1).Dimensions = [3 3];
saveVarsTmp{1}(3, 1).DataType = 'double';
saveVarsTmp{1}(3, 1).Min = [];
saveVarsTmp{1}(3, 1).Max = [];
saveVarsTmp{1}(3, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(3, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(3, 1).DocUnits = '';
saveVarsTmp{1}(3, 1).Description = '';
%创建元素HasVelocity
saveVarsTmp{1}(4, 1).Name = 'HasVelocity';
saveVarsTmp{1}(4, 1).Complexity = 'real';
saveVarsTmp{1}(4, 1).Dimensions = [1 1];
saveVarsTmp{1}(4, 1).DataType = 'boolean';
saveVarsTmp{1}(4, 1).Min = [];
saveVarsTmp{1}(4, 1).Max = [];
saveVarsTmp{1}(4, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(4, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(4, 1).DocUnits = '';
saveVarsTmp{1}(4, 1).Description = '';
BusVisionDetectionsMeasurementParameters.Elements = saveVarsTmp{1};
%创建总线BusVisionDetectionsObjectAttributes
BusVisionDetectionsObjectAttributes = Simulink.Bus;
BusVisionDetectionsObjectAttributes.Description = '';
BusVisionDetectionsObjectAttributes.DataScope = 'Auto';
BusVisionDetectionsObjectAttributes.HeaderFile = '';
BusVisionDetectionsObjectAttributes.Alignment = -1;
saveVarsTmp{1} = Simulink.BusElement;
%创建元素TargetIndex
saveVarsTmp{1}(1, 1).Name = 'TargetIndex';
saveVarsTmp{1}(1, 1).Complexity = 'real';
saveVarsTmp{1}(1, 1).Dimensions = [1 1];
saveVarsTmp{1}(1, 1).DataType = 'double';
saveVarsTmp{1}(1, 1).Min = [];
saveVarsTmp{1}(1, 1).Max = [];
saveVarsTmp{1}(1, 1).DimensionsMode = 'Fixed';
saveVarsTmp{1}(1, 1).SamplingMode = 'Sample based';
saveVarsTmp{1}(1, 1).DocUnits = '';
saveVarsTmp{1}(1, 1).Description = '';
BusVisionDetectionsObjectAttributes.Elements = saveVarsTmp{1};
clear saveVarsTmp;
加速度变化曲线如下:

版权声明:本文为博主作者:Auerbach°原创文章,版权归属原作者,如果侵权,请联系我们删除!
原文链接:https://blog.csdn.net/qq_67958647/article/details/135721172